Design of 20 t forging manipulator clam p rotation hydraulic control system*
2014-06-09GeqiangLIBingJIANGYuesongLI
Ge-qiang LI,Bing JIANG,Yue-song LI
Henan University of Science and Technology,Luoyang 471003,China
Design of 20 t forging manipulator clam p rotation hydraulic control system*
Ge-qiang LI†,Bing JIANG,Yue-song LI
Henan University of Science and Technology,Luoyang 471003,China
This study designs the clamp rotation electro-hydraulic proportional control system of forging manipulator,establishes the mathematical model of the clamp rotation mechanism,and determines the initial parameters of PID controller and the correspondent fuzzy logic system.The modeling and simulation on the clamp rotation control system of forging manipulator are gained by the MATLAB/Simulink and AMESim co-simulation technology.It is verified that the design scheme is reasonable,mathematical model is accurate and system robustness is better based on fuzzy PID control.
Forging manipulator,Fuzzy PID,AMESim,Electro-hydraulic proportional control system
1.Introduction
Forging manipulator,which is mainly used for clamping forgings and auxiliary forging machine,is the important equipment to achieve forging automation,and an important factor in influencing the development of equipment manufacturing industry[1]. Due to hydraulic drive has advantages of fast response,wide speed range and automatic overload protection,the large-tonnage forging manipulator usually uses hydraulic drives.Clamp rotation is an important feature for the overloaded operation equipment.The clamp rotation property is affected by time varying operating conditions and the structure of hydraulic system.In order to ensure the quality of forging and increase productivity,the clamp rotation system must rotate fast,smoothly and accurately[2-3]. This article designs the clamp rotation electro-hydraulic proportional control system of20 t forging manipulator,uses fuzzy PID control strategy for commanding the clamp rotation angular position,and studies the clamp rotation control system through the MATLAB/Simulink and AMESim co-simulation technology simulation.
2.Clam p rotation hydraulic control system and mathematical model
Clamp rotation mechanism is mainly used for achieving forgings free rotation.The forging manipulator clamp rotation hydraulic system schematic diagram is shown in Figure 1.The opening of electro-hydraulic proportional directional valve core controls the spin direction and the speed of hydraulic motor,and then drives the clamp forgings to rotate.Accumulator absorbs vibration produced in the process of forging and relief valve is overload protection.The proportional directional valves and two groups of cartridge valves are used to achieve the clamp positioning and locking.Because the quality of forgings is large,the accumulator check valve and accumulator relief valve design are used to reduce the impact of forging.

Figure 1.Clamp rotation hydraulic system schematic diagram
Hydraulic power actuators which are composed of electro-hydraulic proportional directional valves,hydraulic motors and load,have a direct impact on the quality of clamp rotation hydraulic system,so determining the mathematical model of valve-controlled motor system is the prerequisite for analysis of the whole driving system[4].According to the flow equations of electro-hydraulic proportional valve,flow continuity equation of hydraulic motors and hydraulic motors and torque load balancing equations,by deduction,the motor angular displacement expression,which is disturbed by valve core displacement and outside load disturbance at the same time,are gained:

Where,formula derivation and meaning of the symbol can be found in reference.
In the valve control motor system,motor and ultimate load are connected with rigid gear,so elastic load can be negligible.As it is often the cas<<1,the simplified hydraulic rotation of the motor shaft on the valve core displacement transfer function can be gotten:in this equation,ωhTechnical parameters of valve-controlled motor are shown in Table 1.
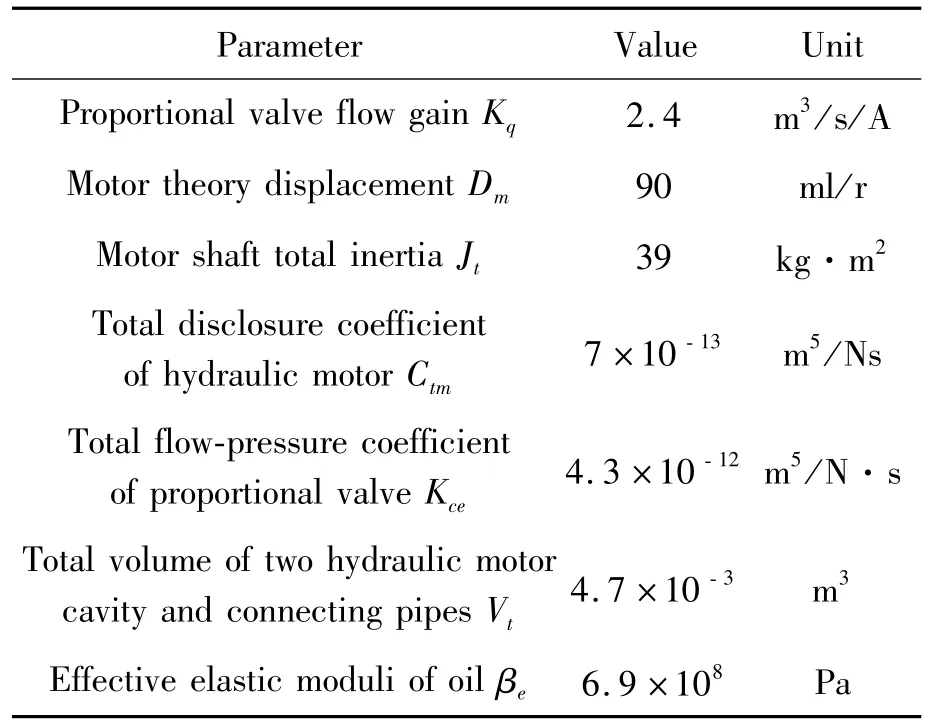
Table 1.Technical parameter of valve-controlled motor
According to the parameters in the Table 1,it can be gotten that the valve-controlled motor hydraulic system natural frequencyωh=110.3 rad/s,hydraulic damping ratioξh=0.225.So the motor shaft rotation on the valve core displacement transfer function isIt provides the basis for the initial parameters design of PID controller.
3.Clamp rotation angular displacement control algorithm
The smooth precise positioning of clamp rotation directly affects the efficiency and quality of the job of forging,so it is necessary to use the appropriate control algorithm to adjust the rotation static and dynamic performance.Conventional PID control algorithm is simple,but cannot adjust PID control parameters real-time.It is commonly used for Linear Systems and requires precise mathematical model.Clamp rotation mechanism is driven by hydraulic,and the system is time-varying and nonlinear,only establishing approximate mathematical model.Fuzzy PID control algorithm combines features of PID control with fuzzy logic.Online real-time nonlinear adjusting control parameters,and easier realization of algorithms in hardware,are the requirements for a controller meeting clamp rotation system.Therefore a fuzzy PID control algorithm is designed to meet the clamp rotation an-gular displacement control.
The fuzzy controller contains two inputs of the clamp rotation angle error e and the error change rate ec,and three outputs of PID coefficient increments ΔKp,ΔKi,ΔKd.To facilitate the system simulation,e and ec universe of fuzzy sets are defined as{-1,1},similarlyΔKp,ΔKi,ΔKduniverse of fuzzy sets are also{-1,1}.The fuzzy inputs variables and outputs variables are divided into seven levels,and using linguistic variables expression is PB,PM,PS,ZO,NS,NM,NB.All membership functions of fuzzy subsets are triangular-shaped curve[5].
The fuzzy PID controller parameters tuning rules are:when the system error is large,larger Kpand smaller Kdshould be taken to speed up system respond;when system error ismiddle,smaller Kpand the appropriate Kiand Kdshould be taken to have a lower overshoot;when the system error is low,larger Kpand Kdand appropriate Kishould be taken to avoid oscillation near the equilibrium point.The fuzzy inference based on fuzzy rules is used to get a fuzzy set,and then the match fuzzy treatment uses the focus method on fuzzy output variable.According to the different input variables,off line calculation of the exact output corresponding to each fuzzy variable is carried out,making into a fuzzy output control table as shown in Table 2.
In the actual application,the exact current output value of fuzzy controller can be found by checking the table.
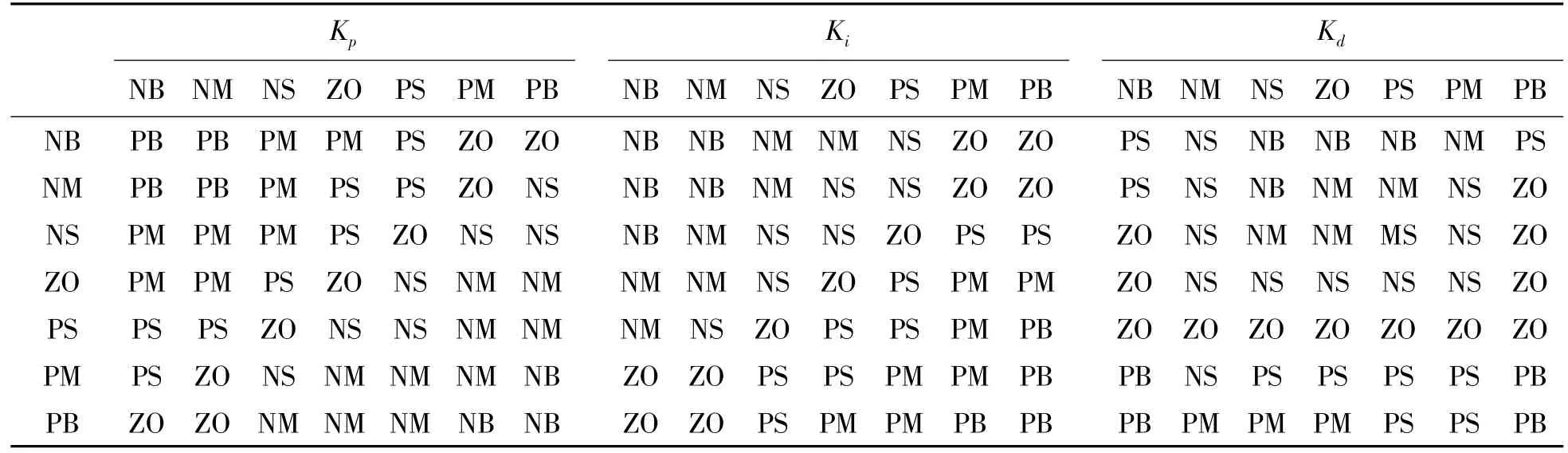
Table 2.Fuzzy rule table of Kp,Ki,Kd
4.Co-simulation of clamp rotation hydraulic control system
Clamp rotation control system is a nonlinear systems,with AMESim sophisticated hydraulic components in the component library module,the clamp rotation control system simulation model is established[6],at the same time,based on MATLAB/Simulink,the simulation model of fuzzy PID control algorithm is established.Through the co-simulation technology,the clamp rotation control system simulation is combined with the motion control algorithm simulation,and the real simulation is carried out on the actual condition of the clamp rotation mechanism.
Figure 2 shows the clamp rotating hydraulic system simulation model.The cartridge valve consists of three parts,and its control oil is equivalent for a given signal to control on-off.In the load location,an angular displacement sensor is used for the measurement and feedback,then from the comparison with the set signal,the clamp rotation system angle control can be realized by fuzzy PID controller.Main simulation parameters are as follows:load,20t forging;working pressure,10 MPa;system flow,505 l/min;motor displacement,107 ml/r;ratio of gear,4.6.
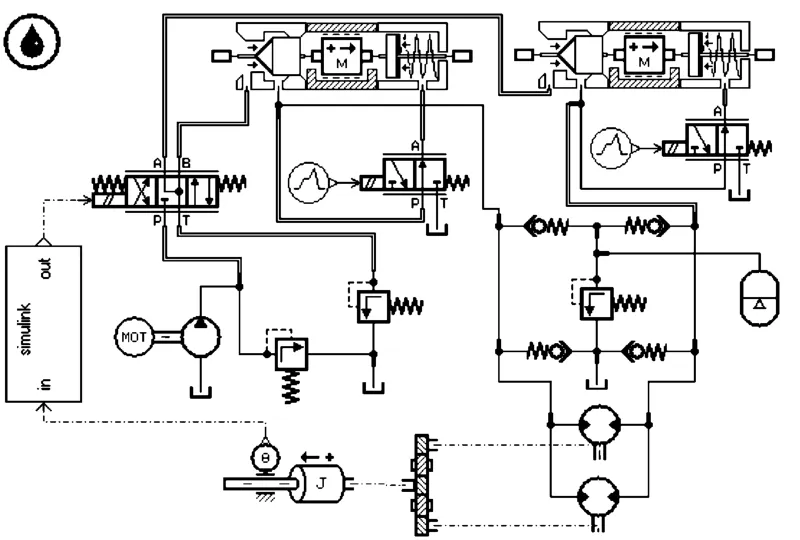
Figure 2.Clamp rotating hydraulic system simulation model
Figure 3 shows the MATLAB/Simulink simulation model of fuzzy PID control algorithm.Based on discrete model,the PID algorithm through co-simulation,exports the algorithm output to simulation model of proportional directional valves in the AMESim controlling valve core opening,and ultimately controlsthe clamp rotation angle.

Figure 3.Simulation model of fuzzy PID algorithm
5.Simulation and analysis of the results
Design requirements for forging manipulator:clamping fastest spinning of 18 r/min and 1 degree rotation accuracy.Under the same conditions,the fuzzy PID control algorithm and the traditional PID control algorithm are used respectively to simulated study the clamp rotation response characteristics. When the rotation angle entered by the system is 15 degree,30 degree and 60 degree,both response curves of the clamp rotation mechanism are shown in Figure 4 and Figure 5.

Figure 4.Dynamic curve of fuzzy PID control
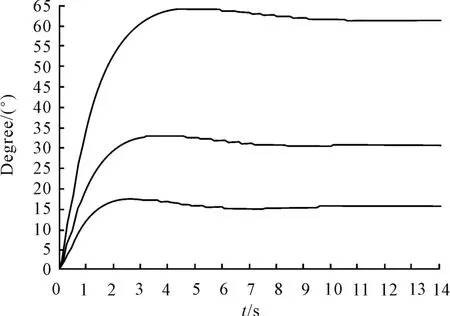
Figure 5.Dynamic curve of conventional PID control
From the clamp rotation control system response curve,it can be seen:the overshoot of traditional PID control system is larger,the deviation is also larger;the frequency of forging melted down is increased,the forging cycle is extend;the system steady state error increases with increasing enter angle.But the system dynamic performance is improved by fuzzy PID control,the system response time is shortened,and the steady precision is improved.
6.Conclusion
The electro-hydraulic proportional control system is used to realize the forging manipulator clamp rotation.Through MATLAB/Simulink and AMESim cosimulation technology,the clamp rotation hydraulic control system simulation model is built,and the simulation analysis of hydraulic system and control algorithms are achieved.The clamp rotation mechanism dynamic characteristics are analyzed under different control algorithms and different input angle.Simulation results show that the hydraulic control system based on fuzzy PID control algorithm adapts time-varying complex environment,meets the system accuracy requirements,and has high degree of robustness.
[1] Xu Faguo,Gao Feng,Guo Weizhong,et al.Review and expectation of forging manipulators[C].International conference on applied mechanisms and machine science,2007.
[2] Chen Dongchi,Wang Dongmei.System design of the integrated control about the forging press and manipulator[J].China metalforging equipment and manufacturing technology,2011(5):22-24.
[3] Liang Yin,Zhao Xuping,Wang Chi,etal.Study on the development of large forging manipulators[J].Scientific and technological achievements review,2010,2:55 -57.
[4] Wang Chunxing.Hydraulic control system[M].Beijing:Mechanical Industry Press,2003.
[5] Liu Jin kun.Advanced PID control and simulation of matlab[M].Beijing:Electronics Industry Press,2003.
[6] Fu Yongling,Qi Xiaoye.Modeling and simulation of AMESim[M].Beijing:Beihang University,2006.
10.3969/j.issn.1001-3881.2014.18.005
2014-04-28
*Project supported by National Natural Science Foundation of China(No.51178375)
†Ge-qiang LI,Professor.E-mail:hitligeqiang@163.com
杂志排行

机床与液压的其它文章
- Electro-mechanical power coup ling system for PHEV with high price-performance ratio*
- Research on multi-axial multi-excitations road simulation test method for AMT actuator*
- Research on the inference of CNC machine fault based on Bayes and FTA
- Design and application of attitude measuring device for DC power output filter circuit
- Simulation of automobile ESP system based on fuzzy control*
- Particle removal by an oscillating bubble in the pipe*