一种新型抹灰机的结构设计
2014-06-09赵华文
王 飞, 邢 进, 赵华文
(1.滨州学院 机电工程系,山东 滨州 256600;2.滨州市公路管理局,山东 滨州 256603)
一种新型抹灰机的结构设计
王 飞1, 邢 进1, 赵华文2
(1.滨州学院 机电工程系,山东 滨州 256600;2.滨州市公路管理局,山东 滨州 256603)
针对目前抹灰机存在的工序复杂效率低的问题,进行了一种新的抹灰机的探索研究。通过对抹灰机支撑架,抹灰机构和移动机构的创新设计,使该机经过一次组装可以进行大面积抹灰。
抹灰机械,结构设计,墙体表面
0 引言
随着现代社会科技水平的不断提高,各种装备技术层出不穷,功能也变得越来越智能。在如此背景之下,作为基础行业的建筑业,也已形成了比较完善的装备体系。但是,相较塔吊,泵车的高水平发展,墙体抹灰却仍停留在人工的层面上,通过手工操作来完成的粉抹墙体施工,操作简单,灵活方便,但同时也存在下列缺点:危险性大,劳动强度高,而且抹灰质量也因人而异,参差不齐[1]。 因此,为了解决这些问题,有人研制出了抹灰机,它工作效率高、抹灰质量好,但是现有的抹灰机也存在许多问题,比如自动化程度较低,抹完一个灰板的宽度后往往又要重新组装与定位,造成人力与物力的浪费。基于此,本文介绍了一种经一次组装能够大面积抹灰的抹灰机。
1 结构设计
抹灰机的主要结构由以下三个部分构成:外部支撑结构和内部的抹灰机构以及机器横向移动机构。
1.1 外部支撑结构
外部的支撑结构包括固定支杆的底座,支杆和支杆上的梁架。支杆上端固定有液压杆,当液压杆伸长时可触及房顶[2]。
1.2 抹灰机构
抹灰机构包括移动底盘,抹灰装置和立式齿条支杆等组成。
其中移动底盘用于对抹灰装置的承载,移动底盘下方有四个轨道轮,可在普通轨道上横向滚动。
抹灰装置由电机,链条,传动带,抹灰板,拨辊,振动电机等构成。当接通电源时,电机正转驱动位于抹灰装置内部的齿轮系统沿立式齿条支杆向上运动,此时,抹灰装置离开底座,电机反转时抹灰装置向下运动,直至与底座接触时停止。电机在控制抹灰装置上下运动的同时,也通过链条带动位于装置前部的传动带和拨辊,将灰槽内的灰浆推向墙面。由于抹灰板与墙面之间具有一定角度,所以灰浆落入由灰板与墙面组成的夹角中,随着抹灰机的不断上升,灰浆被均匀的涂抹在墙面上。当抹灰装置将要到达顶端时,连接着抹灰板的杠杆被压下,抹灰板变成向下的角度,同时触发行程开关,电机反转,抹灰装置开始下降,此时抹灰板也对墙面进行了压光。

图1 整体结构图Fig.1 Overall structure
1.3 横向移动机构
横向移动机构由位于支杆上端的齿轮齿条传动机构,位于地面的导轨和导轨上的抹灰装置底座构成。
齿轮齿条传动机构采用封闭式设计,齿条导轨与位于抹灰机构顶部的齿轮配合使用,用于实现抹灰机构的横向位移。下方导轨的采用一方面是为了控制机器移动方向,同时也为抹灰机的移动提供了一个相对平整的运动平台。机构通过连接杆与抹灰装置的立式齿条支杆连接,一方面带动整个抹灰装置横向移动,另一个方面起到固定支杆,减少抹灰装置工作中的晃动的作用。
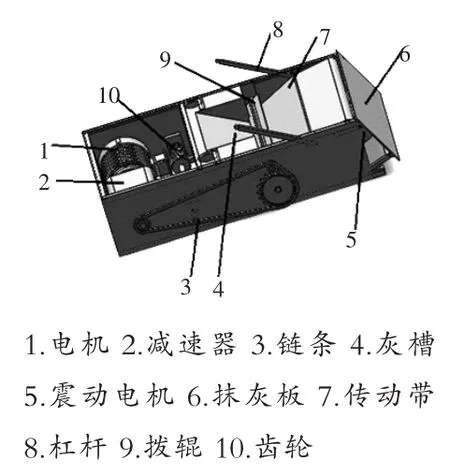
图2 抹灰装置Fig.2 Plastering mechanism
2 工作原理
需要抹灰时,将机器运至工地进行组装。首先根据抹灰厚度的需要,确定支杆底座到墙壁的距离,然后将支杆固定在底座上,接着将支杆顶端的液压杆伸长,使横架与房屋顶端紧密接触,将支杆牢牢固定在地面与屋顶之间。然后将两条轨道也固定底座上,再将齿轮齿条机构安装到支杆顶端[3]。
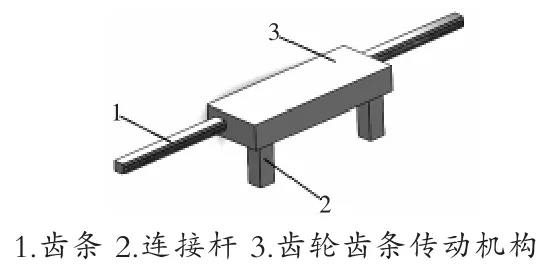
图3 齿轮齿条传动机构Fig.3 Rack and gear device
将立式齿条导轨下端固定在抹灰装置底盘上,上端与齿轮齿条传动机构连接杆相连,组装起抹灰机构。抹灰装置内的电动机将通过齿轮齿条系统带动抹灰装置上下运动,以完成抹灰的工作。当抹灰装置完成一次上下抹灰动作后,位于齿轮齿条机构上方的电机将启动,带动抹灰机构在轨道上移动一个抹灰板的距离后停止转动,然后位于抹灰装置内的电机再次启动,再次带动抹灰装置上下运动进行抹灰作业。接下来抹灰机将反复重复这个过程直至运动到横向齿条轨道的尽头。由于机器抹灰的宽度由横向齿条轨道确定,因此原则上只要增加齿条轨道的长度,该抹灰机经过一次组装可以粉抹更多的面积。
3 主要性能指标
抹灰高度/m:2.7~4.0;抹灰板抹灰宽度/m:0.6~1.0;抹灰速度/(cm/s):1.25~30;功率/kW:1.0;整机质量/kg:200;行走方式:电机驱动。
4 总结
该抹灰机结合了人工抹灰的灵活方便与当下抹灰机械的省时省力,也可以说是将抹灰机与脚手架结合在了一起,使抹灰机实现了连续抹灰,省去了抹灰机频繁组装与拆卸的烦恼。而且,齿轮齿条传动机构的运用使抹灰机构从上一个工位到下一个工位所抹墙面之间的连接更加平整,在提高工作效率的同时也提高了抹灰质量。
[1]薛奎.新型半自动多功能抹灰机的设计[J].工程建设与设计,2002,10.
[2]杨振宇,巩传根,等.新型抹灰机的设计[J].建筑机械,2008,15.
[3]王莹,谢守勇,王靖,一种新型抹灰机的设计和仿真[J].西南师范大学学报(自然科学版),2012,11.
[4]成大先.机械设计手册全卷[M].北京:化学工业出版社,1999.
Structure Design of a New Type Wall Plastering Machine
WANG Fei1,XING Jin1,ZHAO Hua-Wen2
(1.Department of Electrical and Mechanical Engineering,Binzhou University,Binzhou Shandong 256600,China;2.Binzhou Highway Administration Bureau,Binzhou Shandong 256603,China)
In order to solve the problem of complexity and low efficiency in current,a new type of wall plastering machine has been designed in this paper.Due to adoption of the new type of mounting,plastering mechanism and the moving mechanism,this new machine can paint larger area once assembled.
plastering machine;structure design;wall surface
TB47
:Adoi:10.3969/j.issn.1002-6673.2014.03.029
1002-6673(2014)03-072-02
2014-04-10
项目来源:滨州学院国家级大学生创新训练计划项目(201210449149)
王飞(1990-),男,在读本科生。研究方向:产品创新设计;通讯作者:邢进(1980-),女,硕士研究生。研究方向:机电控制与生产过程自诊断。
