五桥臂电压源逆变器两永磁同步电机驱动的研究
2014-06-08耿强张必军史婷娜谷鑫
耿强,张必军,史婷娜,谷鑫
(1.天津工业大学天津市电工电能新技术重点实验室,天津300387; 2.天津大学电气与自动化工程学院,天津300072)
五桥臂电压源逆变器两永磁同步电机驱动的研究
耿强1,张必军2,史婷娜2,谷鑫1
(1.天津工业大学天津市电工电能新技术重点实验室,天津300387; 2.天津大学电气与自动化工程学院,天津300072)
以五桥臂电压源逆变器驱动两台三相永磁同步电机控制系统为研究对象,采用半周期调制策略实现两电机速度的独立控制。结合两电机的d、q轴数学模型,分别设计两电机的无差拍电流控制器。相比传统的PI控制器,无差拍控制器能将下一拍的输出值直接给定为控制量的参考值,从而缩短了系统动态过程的调节时间。仿真和实验结果验证了无差拍控制器的快速性和有效性。
五桥臂电压源逆变器;永磁同步电机;半周期调制;无差拍控制器
1 引言
近年来由于多电机在造纸、纺织、炼钢、城市轨道交通等领域中的广泛应用,使得多电机的驱动技术成为研究热点。对多电机系统的研究可简化为对两电机系统的研究[1-3]。文献[4,5]研究了两电机驱动的三相、四相、五相电压源逆变器的拓扑结构,并将其应用到多相电机的控制系统中。在多相电压源逆变器驱动多相电机控制系统的基础上,文献[6]将电压源逆变器的桥臂数推广到(2n+1),并提出n台电机驱动系统的拓扑结构,与传统的多电机驱动方式相比,该方法减少了开关数量,降低了成本。
本文以五桥臂电压源逆变器两电机驱动系统为研究对象,采用半周期调制策略。该策略将一个调制周期平均划分为两个半周期,在每个半周期内,对一台电机进行空间矢量脉宽调制,另一台电机则受零电压矢量控制,依此交替进行[7]。在此基础上,本文设计两电机的无差拍控制器代替传统的PI控制器,实现了两电机动态过程的快速响应[8,9]。
2 五桥臂逆变器的拓扑结构
五桥臂电压源逆变器的拓扑结构如图1所示。为减少逆变器开关器件的使用数量,将桥臂c1、c2作为一个公共桥臂,组成五桥臂逆变器。其中A、B、C为逆变器1的三相桥臂,E、D、C为逆变器2的三相桥臂,桥臂C为逆变器1、2的公共桥臂。a1、b1、c1为电机1的定子三相输入端,a2、b2、c2为电机2的定子三相输入端,C桥臂为两电机定子的公共输入端。

图1 五桥臂电压源逆变器的拓扑结构图Fig.1Five-leg voltage source inverter topologies diagram
3 五桥臂电压源逆变器的驱动方式
3.1 有效空间电压矢量作用时间的确定
有效矢量和扇区划分如图2所示。不失一般性,令电机1的参考电压矢量位于扇区I,电机2的参考电压矢量位于扇区III,其分别以角速度ω1、ω2在空间旋转,控制系统采用基于转子磁场定向的矢量控制方式。
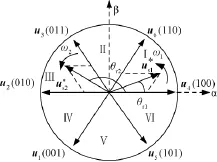
图2 两电机参考电压矢量图Fig.2Reference voltage vector diagram of two motors
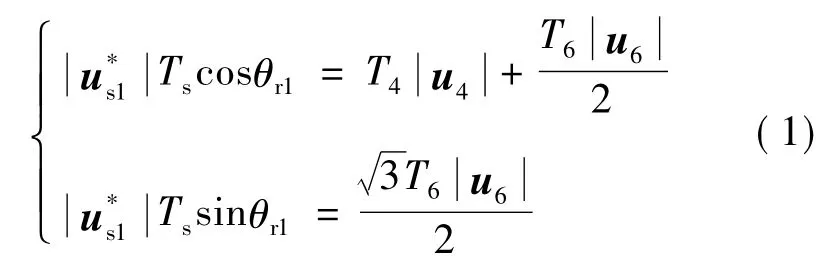
式中,Ts为采样时间;T4和T6分别为有效空间电压矢量u4(100)和u6(110)的作用时间。
设直流母线电压为Ud,则,将其代入式(1),可得有效空间电压矢量u4(100)、u6(110)和零矢量u0(000)的作用时间分别为
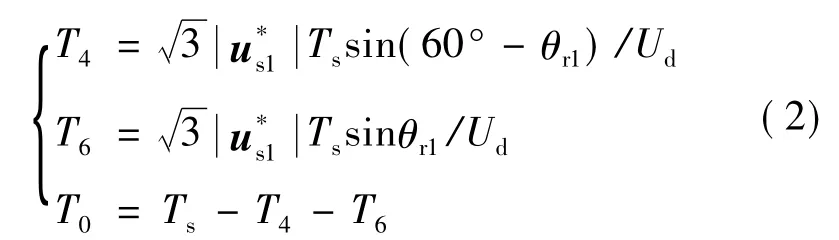
令控制周期内各上桥臂开关器件的有效作用时间分别为TA、TB、TC、TD、TE,零矢量u0(000)与u7(111)的作用时间相等,产生如图3所示的对称的PWM驱动波形。
则逆变器上桥臂各开关器件的有效作用时间为

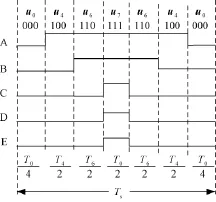
图3 五桥臂逆变器PWM驱动波形图Fig.3PWM driving waveforms of five-leg inverter
3.2 五桥臂逆变器的分时驱动
为实现两台永磁电机速度的独立控制,将逆变器的控制周期平均划分为两个半周期,分别为T1(即kTs~(k+1/2)Ts)和T2(即(k+1/2)Ts~(k+ 1)Ts)。在T1内,逆变器1对电机1进行控制,逆变器2暂不工作;T2内,逆变器2对电机2进行控制,逆变器1暂不工作。当逆变器1作用时,其三相桥臂A、B、C进行空间矢量脉宽调制(SVPWM),逆变器2的桥臂D、E始终保持关断状态,即作用于逆变器2的有效空间电压矢量为零电压矢量u0(000)和u7(111);同理T2内逆变器1作用的有效空间电压矢量为零矢量u0(000)和u7(111),以后每个控制周期内,五桥臂逆变器均采用此两种方式交替进行工作。
3.3 五桥臂逆变器两电机无差拍控制器的设计
表贴式永磁同步电机的数学模型分析如下。基于d-q轴的电压方程为

磁链方程为

将式(5)代入式(4),可得
将式(6)离散化后可得

式中,id、iq分别为d-q轴电流分量;ψd、ψq分别为d-q轴磁链分量;ψf为转子永磁体磁链系数;Rs为定子电阻;L为定子电感,此处默认为L=Ld=Lq;ωe为转子电角速度;Ts为离散化采样周期。
系统的总体控制框图如图4所示。本文采用id=0的控制方式,且两电机的速度环采用传统的PI控制器,电流环采用无差拍控制器。设两电机的转子角位置为θr1和θr2,三相电流分别为ia1,ib1,ic1,ia2,ib2,ic2,经3s/2r变换后与速度环的输出一起作为无差拍控制器的输入,无差拍控制器的输出经2r/2s变换后输入给SVPWM调制模块,该模块输出的六路驱动信号的占空比作为半周期调制模块的输入,经半周期调制算法后产生适合五桥臂逆变器的PWM驱动波形,实现对两电机速度的独立控制。

图4 五桥臂两电机控制系统总体框图Fig.4Diagram of five-leg two motor control system
4 仿真分析
为比较PI控制器与无差拍控制器的控制性能,采用半周期调制方式,对两电机系统进行如下的仿真对比实验。永磁同步电机的参数如表1所示。
空载时电机1、2同时起动,其中电机1给定转速为480r/min,电机2给定转速为400r/min;0.2s时电机2的转速由400r/min阶跃至-400r/min;0.4s时电机1突加5N·m的负载转矩,电机2突加10N·m的负载转矩。图5为PI控制下两电机的运行波形。

表1 永磁同步电机的参数Tab.1Parameters of permanent magnet synchronous generator

图5 PI控制法下的仿真波形图Fig.5Simulation waveforms with PI control
图6为无差拍控制法下两电机的运行波形。

图6 无差拍控制法下的仿真波形图Fig.6Simulation waveforms with deadbeat control
由图5和图6可知,两种控制法下两电机的稳态性一致,此时无差拍控制法下两电机的动态性能优于PI控制法下两电机的动态性能,且无差拍控制法下两电机能获得波动较小的电磁转矩。
5 实验分析
实验系统的硬件实物图如图7所示,实验中永磁同步电机参数如表1所示,直流侧电压为150V。
两电机空载,电机1给定转速n1_ref为150r/min,电机2给定转速n2_ref为100r/min,稳态时电机2转速阶跃至200r/min,转速波形如图8所示。

图7 五桥臂逆变器两电机系统硬件实物图Fig.7Five-leg two motor system hardware physical block
由图8可得,无差拍控制算法下电机2的给定转速n2_ref阶跃至200r/min时,电机2的实际转速n2经过700ms的调节时间后达到给定转速200r/min,而PI控制算法的调节时间为800ms,且电机2的转速变化时,电机1的转速不受影响。故无差拍控制算法下电机的动态性能较好,且两种控制算法均能实现两电机速度的独立控制。

图8 两种控制方法下的转速波形Fig.8Speed waveforms with two control algorithms
6 结论
本文针对五桥臂逆变器两电机驱动系统,采用半周期调制法对两电机同时进行驱动,实现了两电机独立的速度控制。设计了两电机的无差拍电流控制器,并进行了相应的仿真分析和实验验证。仿真和实验结果表明两电机在转速完全独立控制的同时,采用无差拍电流控制器能提高两电机系统的动态性能,减小两电机的转矩波动,证明了本文所设计的五桥臂逆变器两电机驱动系统无差拍电流控制器的有效性。
[1]Delarue P,Bouscayrol A,Semail E.Generic control method of multi-leg voltage-source-converters for fast practical implementation[J].IEEE Transactions on Power E-lectronics,2003,18(2):517-526.
[2]Jones M,Dujic D,Levi E,et al.A two-motor centredriven winder drive fed by a five-leg voltage source inverter[A].2007 IEEE European Conference on Power Electronics and Applications[C].2007.1-10.
[3]Jones M,Vukosavic S N,Dujic D,et al.Five-leg inverter PWM technique for reduced switch count two-motor constant power application[J].Electric Power Apply,IET,2008,2(5):275-287.
[4]薛山,温旭辉(Xue Shan,Wen Xuhui).一种新颖的多相SVPWM(A novel multiple SVPWM)[J].电工技术学报(Transactions of China Electrotechnical Society), 2006,21(2):68-72.
[5]姜海博,黄进,康敏(Jiang Haibo,Huang Jin,Kang Min).单相绕组五相永磁无轴承电机的SVPWM控制(SVPWM control of a signal-phase winding five phase permanent magnet bearingless motor)[J].电工技术学报(Transactions of China Electrotechnical Society),2011,26(1):34-39.
[6]Dujic D,Jones M,Vukosavic S N,et al.A general PWM method for a(2n+1)-leg inverter supplying n threephase machines[J].IEEE Transactions on Industrial E-lectronics,2009,56(10):4107-4118.
[7]肖春燕(Xiao Chunyan).电压空间矢量脉宽调制技术的研究及其实现(Research and implement of voltage space vector pulse width modulation techniques)[D].南昌:南昌大学(Nanchang:Nanchang University),2005.
[8]牛里,杨明,王庚(Niu Li,Yang Ming,Wang Geng).基于无差拍控制的永磁同步电机鲁棒电流控制算法研究(Research of robust current control algorithms based on permanent magnet synchronous motor deadbeat control)[J].中国电机工程学报(Proceedings of the CSEE),2013,33(15):78-85.
[9]王宏佳,徐殿国,杨明(Wang Hongjia,Xu Dianguo,Yang Ming).永磁同步电机改进无差拍电流预测控制(Improve deadbeat current predictive control of permanent magnet synchronous motor)[J].电工技术学报(Transactions of China Electrotechnical Society),2011,26(6):39-45.
Research of two three-phase permanent magnet synchronous motors drive system with five-leg voltage source inverter supply
GENG Qiang1,ZHANG Bi-jun2,SHI Ting-na2,GU Xin1
(1.Tianjin Key Laboratory of Advanced Technology of Electrical Engineering and Energy,Tianjin Polytechnic University,Tianjin 300387,China; 2.School of Electrical Engineering and Automation,Tianjin University,Tianjin 300072,China)
In this paper,half-period modulation strategy is used to control the speed of two motors independently based on the five-leg voltage source inverter driving two permanent magnet synchronous motors control system.Combined with d,q-axis mathematical model of two motors,deadbeat current controller are designed.Compared with conventional PI controller,the next shot output value of deadbeat controller can be given as reference value directly to the amount of control,thereby the adjustment time of dynamic process is reduced.Simulation and experimental results can verify the rapidity and effectiveness of deadbeat controller.
five-leg-inverter;permanent magnet synchronous motor;half-period modulation;deadbeat controller
TM464
A
1003-3076(2014)10-0007-05
2013-12-23
国家自然科学基金资助项目(51377121;51307121)
耿强(1978-),男,天津籍,讲师,博士,研究方向为电机系统及其控制;张必军(1987-),男,湖北籍,硕士研究生,主要从事电力电子装置和电机控制的研究。
