基于MATLAB的“电力拖动控制系统”仿真教学研究
2014-06-08陈冲
陈 冲
(盐城工学院,江苏 盐城 224051)
引言
MATLAB中的Simulink工具是以直观的模块框图对各种动态系统进行建模、分析和仿真的平台,它提供了不断扩展、内容丰富的模块库,为控制系统仿真提供了极大的便利。把基于MATLAB/Simulink的计算机仿真技术融入到电力拖动控制系统教学中,通过搭建与实际系统相接近的模型,动态模拟实验过程,分析不同工况下电力拖动系统运行情况,可以加深学生对所学理论知识的理解,培养学生独立思考、自主探究的能力,为学生今后从事工程设计和科学研究打下良好的基础。[1][2]
1 双闭环直流调速系统的工作原理
转速-电流双闭环直流调速系统的结构如图1所示。系统转速的给定信号与反馈信号的差值输入到转速调节器ASR,ASR的输出作为转矩的控制信号,其输出与电流反馈据信号的差值作为ACR的输入,其输出通过整流器的触发装置去控制电枢电压。启动时,加入给定电压*,ASR以饱和限幅值输出,使电动机以限定的最大启动电流加速启动,直到电机转速达到给定转速,并在出现超调后,ASR退出饱和,电枢电流下降,经过两个调节器的综合调节,最终使系统稳定下来。
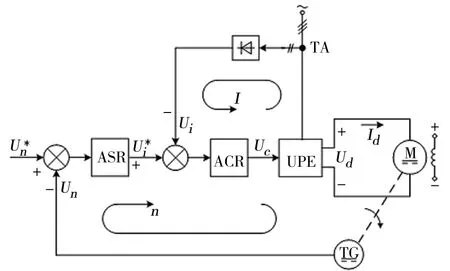
图1 转速-电流双闭环直流调速系统
2 仿真教学案例[3]
基于晶闸管供电的双闭环直流调速系统,系统给定数据如下:额定电压220V,额定电流55A,额定转速1000r/min,电动势系数Ce=0.1925 V·min/r,允许过载倍数λ=1.5;晶闸管装置放大系数=44;电枢回路总电阻=0.5 Ω;电枢时间常数Tl=0.017s,励磁时间常数Tm=0.075s;电流反馈系数β=0.05 V/A(≈ 1 0V/1.5IN),转速反馈系数α=0.01 V·min/r(≈10V/nN)。设计要求:①稳态指标:无静差;②动态指标:电流超调量σi≤5%,转速超调量σn≤20%。
2.1 电流调节器设计
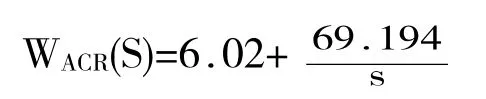
为保证稳态电流无差,按典型Ⅰ型系统设计,采用PI调节器。设整流装置采用三相桥式电路,平均失控时间为Ts=0.0017s,取电流滤波时间常数Toi=0.002s,则电流环小时间常数为TΣi=Ts+Toi=0.0037s;电流调节器超前时间常数;要求σi≤5%时,取则电流环开环增益,因此,ACR的比例系数:

电流调节器的传递函数为:

2.2 转速调节器设计
由于转速稳态无差,并依据动态要求,转速环按典型Ⅱ型系统设计,也采用PI调节器。设转速滤波时间常数Ton=0.01s,转速环滞后时间常数为:

选中频段宽度h=5,ASR的超前时间常数为:

转速环的开环增益:
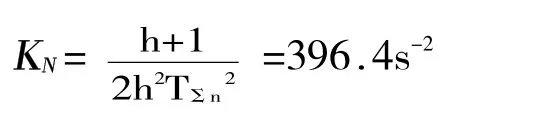
则ASR的比例系数为:

转速调节器的传递函数为:
在转速、电流调节器的设计过程中,对晶闸管整流装置近似条件、忽略反电动势对电流环影响的条件、电流环传递函数简化条件以及小时间常数环节近似处理条件进行了校验,检验结果满足近似条件。
3 面向系统动态结构图的仿真及结果分析
根据双闭环直流调速系统的动态结构图,基于MATLAB的Simulink工具箱以及电力系统工具箱自带的饱和限幅的PI调节器模块建立系统仿真模型,如图2所示。
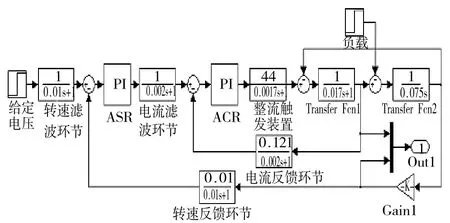
图2 面向动态结构图的双闭环调速系统仿真模型
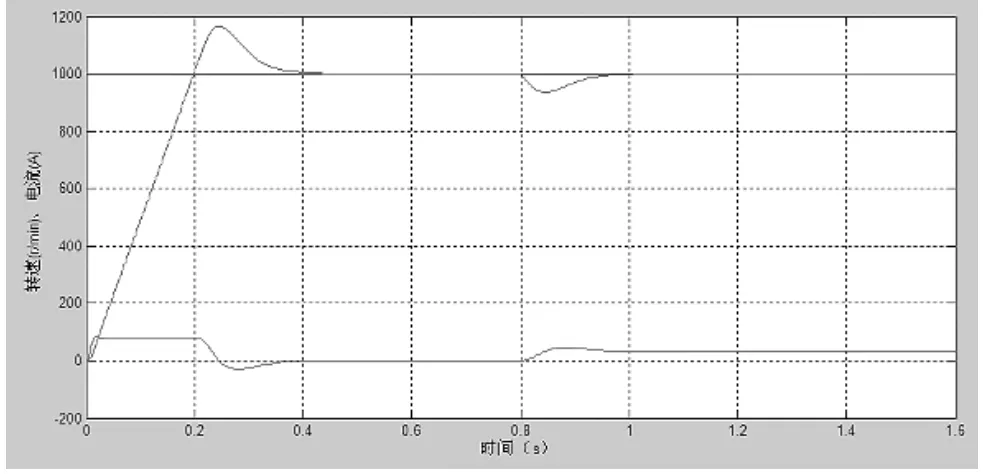
图3 面向动态结构图的双闭环调速系统仿真曲线
当给定电压为10V时,直流电动机空载启动,0.8s时突加60%的额定负载,系统转速和电流响应曲线如图3所示。由曲线可知,电动机启动过程历经电流上升、恒流升速、转速调节三个阶段后趋于稳定空载转速。启动时,在ACR的作用下电枢电流接近最大值,电动机转速以准时间最优准则开始上升,0.2s时转速超调,电流很快下降,0.4s时达到稳态,稳态转速为电动机额定转速1000r/min;电流超调量σi=4.6%≤5%、转速超调量σn=16.4%≤20%,满足设计要求。0.8s时突加60%的额定负载,转速先下降后上升并很快稳定下来,恢复到给定值。与此同时,电流迅速上升到负载电流。转速最大动态降落为6.5%,恢复时间为0.16s,验证了闭环控制系统具有良好的抗干扰性。
4 面向系统电气原理图的仿真及结果分析
基于MATLAB的Simulink工具箱以及电力系统工具箱建立系统面向电气原理图的仿真模型,如图4所示。该模型由三相交流电源、三相晶闸管整流桥、同步6脉冲触发器、直流电动机、平波电抗器、给定电压、转速PI调节器、转速滤波和转速反馈等环节组成,这样的仿真更接近于实际系统。
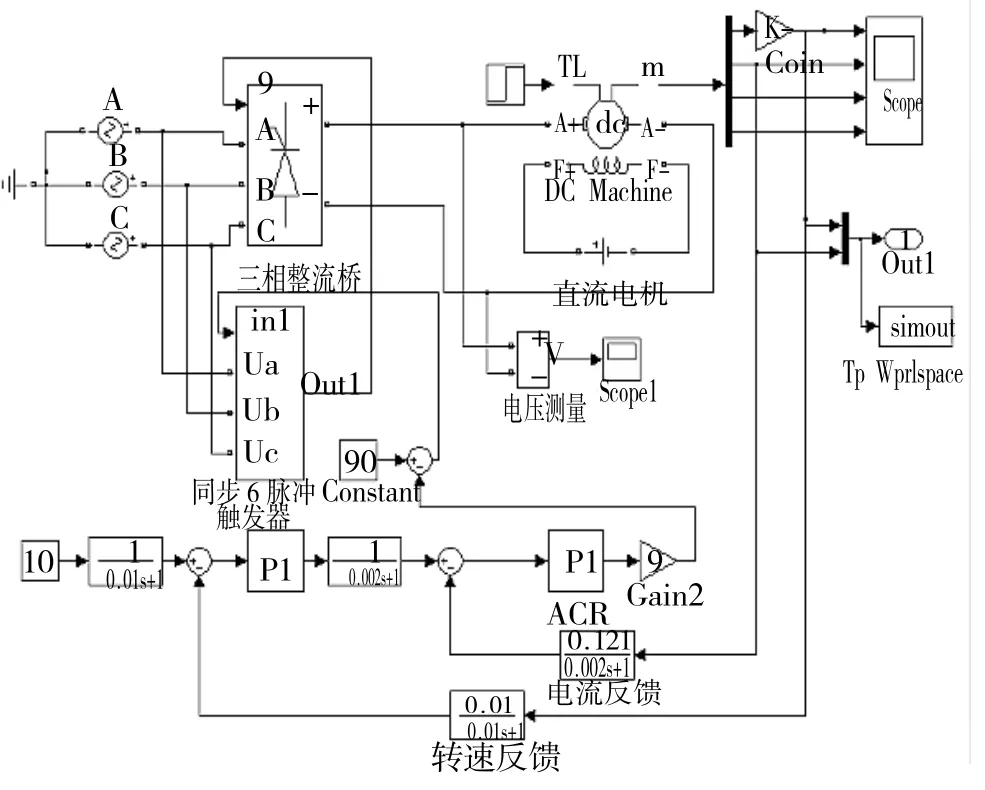
图4 面向电气原理图的双闭环调速系统仿真模型
图5 面向电气原理图的双闭环调速系统仿真曲线
当给定电压为10V时,直流电动机空载启动,0.8s时突加60%的额定负载,系统转速和电流响应曲线如图5所示。由曲线可知,电动机在空载条件下近似恒流升速,在0.18s左右上升到给定转速并超调,转速超调量σn=16%≤20%,经过0.2s左右系统转速很快稳定下来,满足设计要求。0.8s时突加60%的额定负载,转速先下降后上升并很快稳定下来,调节时间0.12s左右,最终实现了转速稳态无静差。
5 系统性能优化
通过对以上仿真分析可知,双闭环直流调速系统利用了转速调节器ASR的饱和非线性实现了准时间最优控制,但同时带来了转速超调。由此引导学生分析转速超调产生的原因,并通过指导学生查阅文献,提出解决问题的方法,进而让他们通过计算机仿真去验证。抑制转速超调的方法主要有:转速微分负反馈、转速积分分离PI控制、转速内模控制以及智能控制方法[4][5][6],本文以第二种方法为例进行说明。传统PI调节器存在快速性和退饱和超调大的矛盾,转速调节器若采用积分分离PI控制,当系统偏差较大时,只有比例调节器P起作用,使系统具有快速响应能力;当系统偏差减少到一定程度时,积分I开始起作用,调节器为PI调节器。既可以消除稳态误差,又能避免较大的退饱和超调。积分分离PI控制仿真模块和系统响应曲线如图6和图7所示。
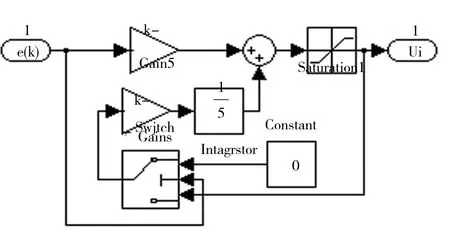
图6 积分分离PI控制仿真模块
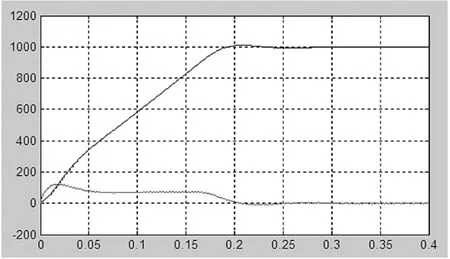
图7 转速环积分分离PI控制时的系统响应曲线
结束语
将计算机仿真技术融入到电力拖动控制系统教学中,在有限的实验条件下用仿真验证抽象化的理论,预习实验,为工程设计和实际系统调试带来便捷。仿真教学中不但要重视仿真建模的过程,更要重视引导学生对仿真结果进行分析。根据仿真过程中得到的形象化、实际化的响应曲线,从调速性能指标的角度来分析系统性能的优劣,提升学生的自主探究与创新能力,激发学生从事科学研究的兴趣,教学改革取得了良好的效果。
[1]陈跃东,郎朗,孙新柱.“电力拖动控制系统”教学改革研究与实践[J].宁波大学学报,2010,32(3):98-101.
[2]黄淑芬.MATLAB在电力拖动自动控制系统教学中的应用探索[J].科技信息,2009,(23):161-162.
[3]顾春雷,陈中.电力拖动自动控制系统与MATLAB仿真[M].北京:清华大学出版社,2011.
[4]吴云,王天施,杜明娟.积分分离法调节器直流调速系统研究[J].微计算机信息,2009,25(2):241-243.
[5]张井岗,曾建潮,孙志毅.直流电动机调速系统的内模控制[J].电机与控制学报,1998,(2):126-128.
[6]陈冲.基于神经网络控制的直流调速系统仿真与分析[J].计算机仿真,2013,30(4):356-360.
