一种卫星电视快速自动定位和跟踪系统
2014-06-07高丽娟王鸣周鹏飞
高丽娟,王鸣,周鹏飞
(安徽工程大学安徽省电气传动与控制重点实验室,安徽芜湖241000)
一种卫星电视快速自动定位和跟踪系统
高丽娟,王鸣,周鹏飞
(安徽工程大学安徽省电气传动与控制重点实验室,安徽芜湖241000)
为实现对卫星信号的快速搜索和高精度指向,提出一种利用三维电子罗盘对卫星实现自动定位的系统.通过对步进跟踪过程的分析,结合系统模块化设计思路,分析和设计了自动定位系统的硬件模块和软件中的控制算法.为提高整个系统的抗干扰能力和跟踪精度,采用空间坐标式跟踪来代替十字跟踪,从而快速准确地进行卫星定位.
三维电子罗盘;步进跟踪;十字跟踪;空间坐标
由于我国地域辽阔、地理气候复杂,所以建立完善的网络通信所需周期较长、成本较高,因而很难实现[1].如今西部地区游牧民族或是地质勘探队等在野外所使用的卫星电视,要随住所频繁调动重新寻找卫星.常用的“十字”步进跟踪采用方位面和俯仰面交替调整方式,容易受干扰的影响引起误动作,造成跟踪效果差,严重时导致跟踪失败.想要准确地接收到天上的某颗卫星的信号,最简单常用的方法是一人在室外利用人手转动卫星电视接收天线,而另一人在室内电视前看着接收的卫星信号的强度大小,既费时间、又费人力,且很难快速准确地找到某颗卫星的位置和确定信号的最佳强度[2].
本文对卫星电视原有的步进跟踪技术加以改进,提出一种基于三维电子罗盘实现对卫星电视自动定位系统的2个重要角度(俯仰角和方位角)实时测量的方法[3],使人们能快速、准确地找到某卫星的位置,且成本低廉、使用较为方便.
1 整体设计
自动定位系统整体结构如图1所示.

图1 系统总框图Fig.1 The system block diagram
其中各模块主要设计和功能如下:
(1)天线底座,由天线和支撑转动装置构成.天线俗称大锅,是一个金属抛物面.它的作用是在高频电流和电磁波之间进行能量交换,既可作为发射装置也可作为接收装置.本系统选用的是采用天线偏置技术的偏置馈源天线,在提高天线的效率的同时也不会阻挡主波束.天线外形见图2.

图2 天线Fig.2 Antenna
(2)电机,在整个系统中,主要通过方位、俯仰2个步进电机来驱动天线底座按预定方向搜索对星.由于整个对星过程要求快速精准,所以对步进电机要求可控性好,反应速度快且稳定性高.
(3)控制装置模块用于测量天线的姿态和位置.GPS接收机模块用来测量整个定位系统当前经纬度定位坐标.三维电子罗盘模块用于测量天线所在地的实时方位、俯仰姿态信息.此模块由三轴磁阻传感器和三轴重力加速度传感器模块组成.如图3所示.
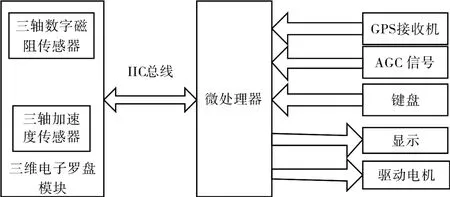
图3 控制系统Fig.3 Block diagram of control system
(4)电视主要用于查看收索信号的强度.
(5)信标接收机的主要作用是将天线接收到的信标信号或DVB信号通过下变频器、A/D变换、滤波等处理后检测出一个与信标能量值成正比的AGC电平值.当天线处于不同的方位俯仰时,AGC电平大小会随所对应的信标信号强度变化,而控制系统则通过AGC的电平控制自动对星.
2 基本工作原理
2.1 卫星跟踪原理
每一个通信卫星都有一个唯一的信标信号或DVB信号,地面天线跟踪就是追踪信标信号或DVB信号,天线的反射面不断调整对准卫星所在的位置,最终反射面精准的锁定卫星后,卫星跟踪过程结束.随着卫星的跟踪技术不断地改进,卫星跟踪大致分为手动跟踪、程序跟踪和自动跟踪3类.综合比较,系统采用自动跟踪的步进跟踪方法来搜索卫星信号.控制系统所能实现的天线对星性能决定系统的通信质量.为了实现在野外高精度快速对星,系统采用先粗后细的跟踪方法.粗跟踪主要用来预搜索,细跟踪主要用来画框跟踪和空间坐标式步进跟踪对目标卫星进行实时逼近.信号搜索过程如图4所示.
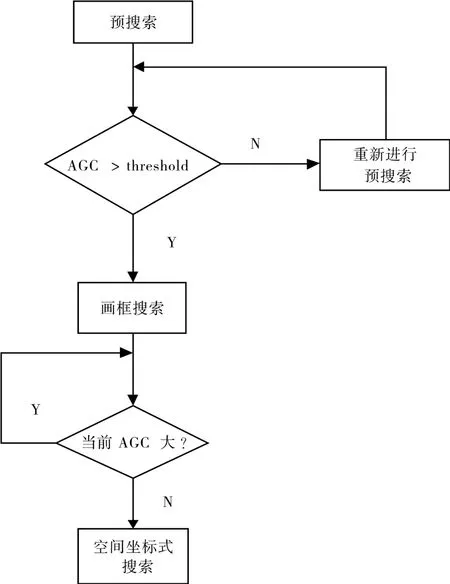
图4 信号搜索过程Fig.4 Signal searching process
2.2 预搜索
预搜索包括驱动电机、目标卫星设定以及天线自动走到理论方位等步骤,如图5所示.

图5 预搜索过程Fig.5 Pre-search process
2.2.1 目标卫星本文选择的目标卫星是同步轨道卫星,所以只需知道卫星所处的经度,这样利用GPS测量天线所在的经度和纬度.同步卫星S与天线所在地理位置A之间的几何关系如图6所示.

图6 S与A的几何关系Fig.6 The target satellite S and the antenna where the geometric relationship between the location of A
图6 中,A为地面上天线位置,S为同步卫星,B为A⌒的经线与赤道的交点.⌒C是O与S的连线⌒在地球表面上的交点.地球表面上通过A点与C点的弧线AC称为方位线,AN为AC的切线,AM为AB的切线,面OAS为方位面,D为切线AM与赤道平面的交点,E为切线AN与赤道平面的交点.
方位角又称地平经度(Azimuth;Az),是在平面上量度物体之间的角度差的方法之一.是从某点的指北方向线起,依顺时针方向到目标方向线之间的水平夹角[6].如图6,∠MAN为方位角,俯仰角就是AC与AS的夹角.
2.2.2 方位角、俯仰角计算设天线A的经度和纬度分别为φ1和θ1,目标卫星的经度是φ2.经度差△φ=φ1-φ2.如下推导方位角φa和俯仰角φe的过程[9].
对于方位角,如图6中


由式(1)到式(3)可以得到天线方位角

由于大多数方位角的计算都是以正北方向为参考基准,而上面方位角是以正南方向为基准求得,所以式(4)还需转化[7].若天线A位于北半球,则方位角=180-φa(A在东侧)或方位角=180+φ(aA在西侧).若A位于南半球,则方位角=φ(aA在东侧)或方位角=360-φa(A在西侧).
同样,对于俯仰角,得

2.2.3 步进电机控制得到方位角和俯仰角的值后,需要对步进电机进行控制,驱动使其又快又好地到达期望的位置.天线转动的同时微处理器不断采集信标接收机输出的AGC电平值,该值反馈至天线控制器,并与设定的搜索门限值进行比较、判断.如图5所示的流程图,当AGC电平值大于搜索门限后,结束预搜索状态,进入跟踪状态(画框搜索和空间坐标式搜索),否则就继续进行预搜索.
2.3 天线的跟踪算法
经过预搜索的粗对准,天线就能进入收到目标卫星信号的范围,但此时收到的信号强度较弱,距离信号最强还有一定的角度偏差.为了使信号的接受效果最佳,需进入细跟踪状态,即画框跟踪和空间坐标式跟踪.
画框跟踪的过程是方位先以Az的步长左移一步,同时俯仰方向不变,方位每移动一步读取当前AGC电平值,并与上次的AGC电平值比较.若当前AGC电平值较大或者相等,原跟踪方向上以原步长跟踪.若此次的AGC值较小,则方位方向不变,俯仰方向上以El的步长移动一步,并在此方向上按照上述规则跟踪(当前AGC大则原方向跟踪,小则改变方向).跟踪方向的改变遵循一定规律,一般沿顺时针方向或逆时针方向[8].
在步进跟踪过程中,天线的移动方向一般采用方位面和俯仰面交替调整方式,类似画“十字”过程[10].例如:保持俯仰方向轴不动调整方位角,在保持方位方向轴不动调整俯仰角,反复进行多次测量,直到天线接收的信号达到最大后才停止跟踪.
图3所示,与细胞对照组比较,ST攻击抗ST多抗血清诱导的RBL-2H3细胞发生脱颗粒,胞外β-HEX含量增加(P<0.01);与模型组比较,0.5%,1.0%和2.0%SHLI均明显抑制ST攻击致敏的RBL-2H3细胞β-HEX的释放,荧光强度分别下降16%,31%和51%(P<0.01)。
空间坐标法搜索过程逻辑关系简单,易编程,原理清晰但易受干扰的影响引起误动作.为弥补“十字”搜索的不足并提高搜索过程的抗干扰能力[4],本设计系统采用空间坐标法搜索.它基于信号电平、方位偏角、俯仰偏角的三维立体关系设计.搜索示意图见图7.

图7 空间坐标法搜索示意Fig.7 Space coordinate method to search the design schematic diagram
假设方位方向的搜索步长为l1,俯仰方向的搜索步长为l2,大致如下搜索方式:设当前位置为坐标A点,获取vA;向上移动l2,达到坐标B点,获取vB;向左移动l1,为坐标C点,获取vC;向下移动l2,为坐标D点,获取vD.然后判断电平相互之间的强弱关系,确定方位面与俯仰面的调整方向和具体调整步距,最后驱动天线方位面和俯仰面同时向场强变大的方向调整,实现快速跟踪.
假设此跟踪容差是ε,则

(1)当ξ1≤ε时,停止方位面的调整;
(2)当ξ2≤ε时,停止俯仰面的调整;
(3)当上述两个条件都满足时,可认为任意取的4个坐标点已经跟顶,跟踪完成.空间坐标搜索流程见图8.
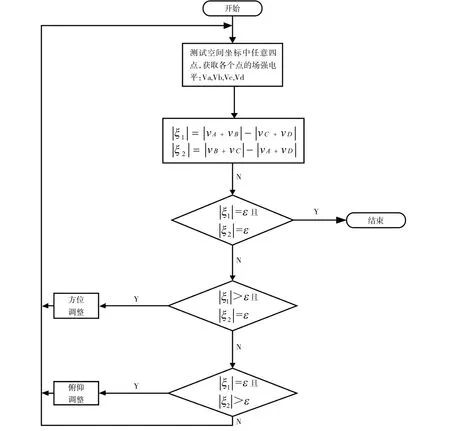
图8 空间坐标式跟踪Fig.8 Space coordinate tracking
3 仿真及分析
在步进跟踪技术中,步长的取值对整个卫星跟踪技术影响非常大.若要提高对星速度,则需要步长较大.若要提高对星精度,则需要步长较小.而步长的变化是根据AGC的差值进行改变的[5].关系式见式(5).

式(5)中α、β为大于零的常数,L(n)为可变的步长,e(n)为归一化的信号强度指向性误差,它直接影响到每一步步长的变化量.如:当指向误差很小,信号强度变化率也很小,此时应采用较小步长;当指向误差大时,信号强度变化率也很大,此时应采用较大步长.
由公式可知:式中参数β决定曲线的取值范围,式中参数α决定曲线的形状.若α、β越大,L(n)的曲线随|e(n)|变化就越陡峭;若α、β越小,L(n)的曲线随|e(n)|变化就越缓和.下面将分别通过控制变量法来绘制步长与AGC值的关系.
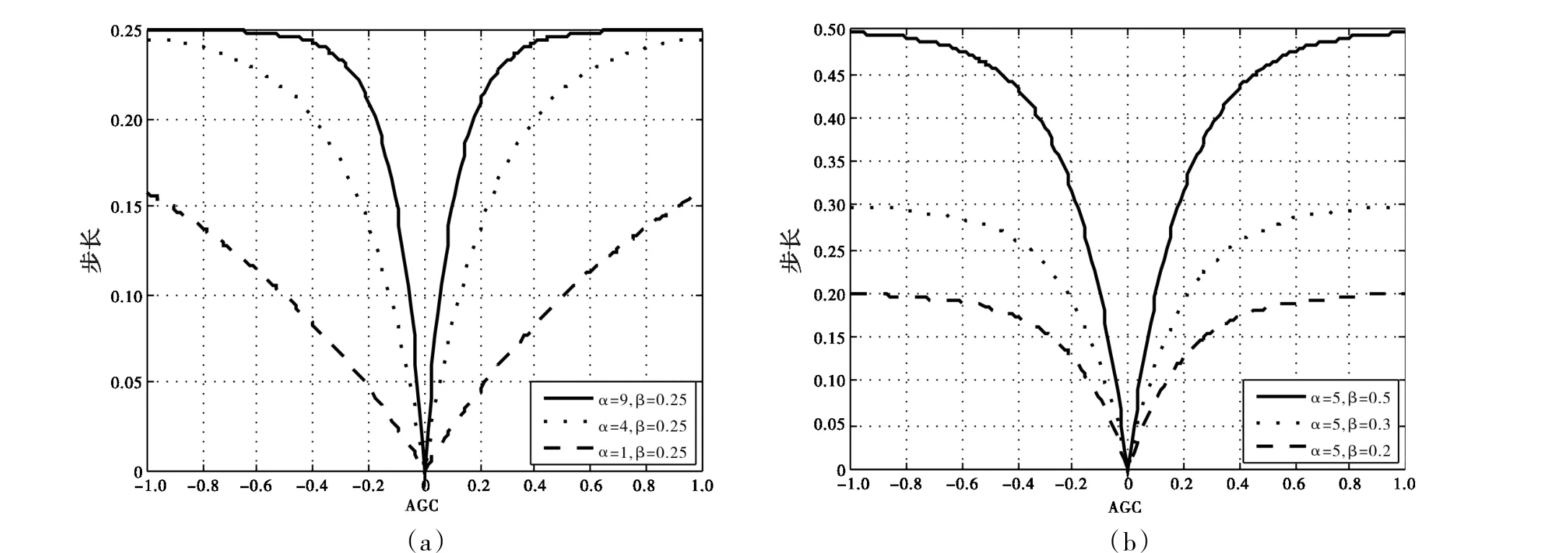
图9 步长与信号强度的曲线变化Fig.9 Variation curves of step and the signal strength
由图9可知,α、β越大,步长越大,跟踪速度越快.但在实际中考虑到精度,所以α、β的选取要合理,要保证步长的取值真实反映指向误差的变化.图9(a)中取α分别为9、4、1,取β为定值0.25.对比发现,实线的变化过于陡峭,步长的变化率大,虚线的变化过于缓和,步长的变化率小.图9(b)中取α为定值5,取β取值为0.5、0.3、0.2.对比发现,实线步长范围变化较大,这样的曲线容易忽略跟踪的精度,虚线步长范围变化较小,这样的曲线容易忽略跟踪的速度.所以图9中所示的点线变化最为适中,根据AGC的变化能适当的调整步长的大小从而提高跟踪的精度.
4 小结
随着卫星自动搜索定位系统日益的完善,自动跟踪技术已在卫星通信系统中广泛应用.本文设计的系统基于模块化的硬件设计和高精度的步进跟踪技术,较好地实现天线对目标卫星的自动搜索与跟踪,在稳定性和对星精准度等方面有了明显的改善.
[1]王秉钧,王少勇.卫星通信系统[M].北京:机械工业出版社,2004.
[2]沈民谊,蔡镇远.卫星通信天线、馈源、跟踪系统[M].北京:人民邮电出版社,1993.
[3]储钟圻.数字卫星通信[M].北京:机械工业出版社,2006.
[4]牛虎成,鲁尽义.高倾斜轨道卫星的最优步进跟踪技术研究[J].西部电子,1994,5(2):8-12.
[5]Timothy P,Charles B,Jeremy A.Satellite communication[M].Second Edition.Publishing House of Electronics Industry,2005.
[6]唐崇楠.基于FPGA的数字信标接收机设计[D].南京:南京邮电大学,2011.
[7]韩文泽,董旭峰.卫星地面站天线的最优跟踪技术[J].无线电工程,2005,35(5):41-42,52.
[8]彭树生,王洋.车载快速搜索/跟踪卫星的控制系统设计[J].计算机测量与控制,2005,13(9):932-934.
[9]魏武,左天虎,刘期烈.卫星通信中一种改进的变步长LMS均衡算法研究[J].重庆邮电大学学报:自然科学版,2014(1):42-48.
[10]李云,赵艳丽,赵为粮,等.卫星通信中定时误差检测改进算法[J].系统工程与电子技术,2014,36(1):151-154.
(责任编辑:卢奇)
A satellite TV locate automatically and track fast system
Gao Lijuan,Wang Ming,Zhou Pengfei
(Anhui Polytechnic University,Anhui Provincial Key Laboratory of Electric and Control, Wuhu 241000,China)
In order to achieve the satellite signals quick search and precision pointing,utilizing three-dimensional electronic compass to achieve automatic positioning satellite was presented in this paper.Through analyzing stepping tracking process and combine the system with modular design ideas,the hardware module of automatic positioning system and control algorithm of software were analyzed and designed.In order to improve anti-jamming capability and tracking accuracy of the entire system,space coordinate tracking was used instead of cross track,which can realized satellite positioning fast and accurately.
three-dimensional electronic compass;stepping tracking;cross-track;space coordinate
TN943.3
A
1008-7516(2014)06-0068-07
10.3969/j.issn.1008-7516.2014.06.014
2014-09-11
高丽娟(1986—),女,安徽芜湖人,硕士研究生.主要从事检测技术与自动化装置研究.