Vessel Motion Effects on Nonlinear Dynamics of Deepwater Drilling Riser
2014-06-07
(Department of Offshore Engineering,China University of Petroleum,Dongying 257061,China)
Vessel Motion Effects on Nonlinear Dynamics of Deepwater Drilling Riser
WANG Teng,ZHANG Xiu-zhan,ZHU Wei-quan
(Department of Offshore Engineering,China University of Petroleum,Dongying 257061,China)
A time domain computer model for deepwater drilling riser subjected to waves,ocean currents and vessel motion was developed in this paper.The vessel motions effects on the dynamic response of deepwater riser are investigated,including mean offsets,wave frequency motions,low frequency motions,period and amplitude of the motion.The results show that vessel motion has an important effect on the dynamic response of deepwater riser,and lead to an increase of upper maximum bending moment by 59%compared to the case without vessel motion,under random waves and current.The mean vessel offset has main effect on lower maximum bending moment.Wave frequency motion has notable effect on the upper maximum bending moment of the drilling riser,and changed sharply with amplitude or period of the wave frequency motion decreasing.Low frequency motion mainly affects the upper maximum bending moment of the drilling riser.
drilling riser;deepwater;vessel motion;nonlinear dynamics response
Biography:WANG Teng(1973-),male,Ph.D.,professor of China University of Petroleum,E-mail:wteng1973@126.com.
1 Introduction
The drilling riser is the key element for drilling in deep water.It is a conductor pipe used in floating drilling operations to convey drilling fluid and to guide tools between the drilling vessel and the wellhead at the sea floor.As exploratory drilling operations move into deeper water,the dynamic effects in riser design become of increasing concern.The dynamic response of riser depends on numerous different factors related to its architecture,operational and environmental conditions.These include water depth,mud weight,sea states current profiles and vessel motion.As the increase of water depth,vessel motions are more significant for dynamic response of deepwater riser,and produce significant dynamic stress in the drilling riser.
In the dynamic analysis,the effect of vessel motions should be combined with wave and current forces to obtain the response of the riser.Vessel offset and motions constitute a source of both static and dynamic loading on the riser[1].The horizontal motions of the drilling vessel in waves are a major factor in determining the dynamics response of marine riser and a sig-nificant design factor in deepwater(Burke,1974)[2].Heuze et al(1976)[3]studied the dynamics of a 4 000ft riser,taken in account the sinusoidal motions of the floating support.Sexton and Agbezuge(1976)[4]pointed out that vessel motion is very important in determining drilling riser behavior,and the vessel motion model must include three terms:mean vessel offset,long term drift motion,and instantaneous vessel response to waves.For the dynamic response of an unbuoyed marine riser subjected to periodic excitation from a surface vessel in the direction of wave propagation,Kirk and Etok(1979)[5]presented a frequency domain normal mode solution.Patel and Sarohia(1984)[6]studied the dynamic of marine riser in the frequency domain by linearizing the hydrodynamic damping term,to determine marine riser displacements and stresses due to self-weight,buoyancy,internal and external pressures,surface vessel motions and environmental forces arising from currents and waves.To solve the marine riser differential equation,Kirk(1985)[7]presented the Galerkin method,and this analysis method is applicable to any riser system subjected to horizontal exciting forces due to fluid and vessel motion.Ahmad and Datta(1989,1992)[8-9]investigated the nonlinear dynamic response of marine risers in frequency domain and time domain,and took into account the long-term drift oscillation and the instantaneous motion of the top vessel.Atadan et al(1997)[10]studied the forced dynamics of the system comprised of a riser,connected to a floating platform and conveying fluid,in the presence of ocean waves and ocean currents.Kuiper et al(2007)[11]studied stability of a straight deepwater riser connected to a heaving floating platform,and took into account the effect of the fluctuation in time of the axial tension of the riser.Most of fore mentioned studies took into account the horizontal excitation from a surface vessel but they did not consider how each term of vessel motion influences the dynamics of marine risers.
In this paper,a time domain computer model for deepwater drilling riser subjected to waves,ocean currents and vessel motion is developed,and solved by finite-difference method.The effects of the vessel motion on the dynamic response of deepwater drilling riser are investigated,and the effect of mean offset,wave frequency motion and low frequency motion on the envelopes of maximum bending moment are presented.
2 Mathematical model
2.1 Assumptions
(1)The drilling riser is made of homogeneous,isotropic and linear elastic material.The effect of choke and kill lines is ignored.
(2)Waves and currents are in the same plane,and riser motion is restrained in two dimensions.
2.2 Governing equation
The coordinate system for the riser is defined as follows.The vertical coordinate,z,has its origin at the bottom of the riser and is positive upward;the horizontal deflection of the riser,y,is measured from a vertical axis through the base of the riser at the sea floor.
The equation of motion governing the horizontal displacement y(z,t) of deepwater drilling riser as a function of depth z and time t can be written as

where,EI is the bending stiffness of the riser,Teis the effective tension in the riser,c is the structure linear viscous damping coefficient,m(z,t) is the mass per unit length(the sum of marine riser structural mass and that its internal fluid mass),f(z,t) is the hydrodynamic load acting on a unit length of the riser in horizontal direction.
As described in McIver and Olson(1981)[12],the effective tension in riser can be expressed as

where,Ttopis top tension applied at the top of the riser,w is equal to the product of the mass per unit length and acceleration of gravity for the elements located above the free surface of the waves and the buoyant weight for totally submerged elements.
Finally,substituting Eq.(2)into Eq.(1)yields:

2.3 Waves and current excitation force
Because the drilling riser is basically a slender body,the excitation force f z,( )t on the riser can be computed using the well-known Morison’s equation that is the sum of the drag force fDand inertia force fM.Taking into account the relative motion between the riser and the flow-induced kinematics,the force per unit length can be expressed as

where,ρwis the density of seawater,D is the outer diameter of riser,u z,( )t is the horizontal component of water particle velocity,CDis the drag coefficient,CMis the inertia coefficient,CAis the hydrodynamic added-mass coefficient,and CM=CA+1.
Substituting Eq.(4)into Eq.(3),and moving the hydrodynamic added-mass to the left side of governing equation yields

2.4 Boundary conditions
The lower end of the riser is connected to wellhead through the lower ball joint,which fixed the lateral offset and allowed rotation.Assumed that the bending stiffness of the lower ball joint is zero,the lower boundary conditions can be expressed as

The upper end of the riser system is connected to the floating platform through a flexible ball joint.The horizontal motion of the upper end of the riser system takes place as a result of that of the platform.The heave movement is neglected.Thus,the upper boundary conditions can be represented as follows,

3 Horizontal vessel motion
The main data regarding vessel motions needed for riser designs are mean offset,wave frequency motions and low frequency motions.Vessel mean offset is the offset created by steady forces from current,wind and waves.Wave frequency motions are the motions at the frequencies of incident waves,a direct consequence of first order wave forces acting on the vessel,causing the platform to move at periods typically between 3-25 seconds,and termed the wave frequency(WF)regime.Low frequency(LF)motion is the motion response at frequencies below wave frequencies at,or near surge,sway and yaw eigenperiods for the vessel.LF motions typically have periods ranging from 30 to 300 seconds.
Vessel motion can be obtained from computer simulations,or from knowledge of the vessel RAOs and the design wave data.As described in Sexton and Agbezuge(1976)[4],vessel motion model is given by


4 Numerical study
4.1 Riser analysis parameters
In this paper,to study the effect of vessel motion on the nonlinear dynamics of deepwater drilling riser,a deepwater drilling riser of length 1 000m is studied by solving the four-order nonlinear partial differential equation,using the finite-difference method.Riser analysis parameters are given as follows
(1)Riser system data
(2)Environmental load condition

4.2 Simulation of random waves
In this study,the one-sided Pierson-Moskowitz spectrum for the surface elevation η is used.

where Α0and B are given by

where,g is the gravitational acceleration,Uw,19.5is the wind velocity evaluated 19.5m above the still water level.
The surface elevation,as a function of both time and spatial coordinate y,is represented in term of finite sums as

where φnis a random number between 0 and 2π,and

The frequency ω0is zero,and ωNis chosen so that most of the area is contained between ω0and ωN.The frequencies ω1to ωN-1are chosen so that the area under the spectrum curve for each interval is equal(Seon Han,2001)[13].The area between the intervals ω0to ωnis n/N of total area under the curve between the intervals ω0to ωN.Therefore, ωnis given by

From Eq.(10)and Eq.(11),

And η is written as

Therefore,the wave velocities are given by

In this study,ωN=1.5rad/s and N=15,time history of wave elevation is plotted in Fig.1,for Hs=6.5m and Ts=8s.
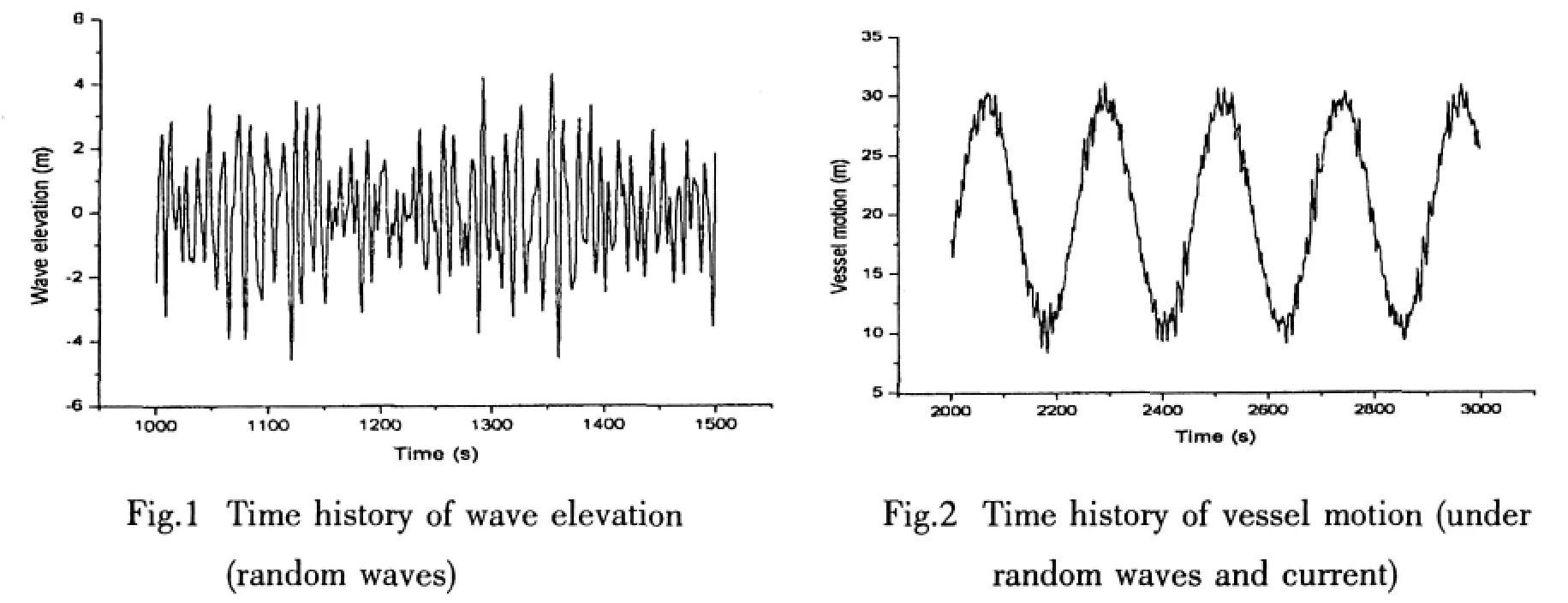
4.3 The effect of vessel motion due to random waves and current
The time history of vessel motion,under random waves and current,is shown in Fig.2.And the current velocity profile is uc=(z/ d )1/7+0.5( z/ d ).The effect of vessel motion(determined by equation(8))due to random waves(Hs=6.5m and Ts=8s)and current on the envelopes of maximum bending moment are presented in Fig.3.It can be seen from Fig.3 that the maximum bending moment distribution of the drilling riser has two maxima,the upper one located just below MWL(mean water level)and the lower one located 50m above the lower ball joint.With vessel motion the lower maximum bending moment increases by 29%and the upper maximum bending moment increases by 59%,compared with that without vessel motion.
The time history of bending moment at location 985m(height above sea floor)is presented in Fig.4.It can be seen from Fig.4 that the vessel motion produces higher cycle stress compared with that without vessel motion,which would accelerate the fatigue failure,and reduce the fatigue life of the drilling riser.
4.4 The effect of vessel motion due to regular wave and current
With regular waves the vessel motion is simulated by three terms:mean vessel offset,low frequency motion given in the former parameters,and wave frequency motion assumed to be a harmonic motion with amplitude 2.0m and period 8s.
The effect of vessel motion on the maximum bending moment distribution of drilling riser under current and regular wave(6.5m/8s)is presented in Fig.5.As shown in Fig.5,vessel motion increases the lower maximum bending moment by 24%and the upper maximum bending moment by 91%,compared with that without vessel motion.
The time history of bending moment at location 985m for regular wave is presented in Fig.6.It can be seen from Fig.6 that the vessel motion produces higher cycle stress and lower frequency component compared with that without vessel motion.
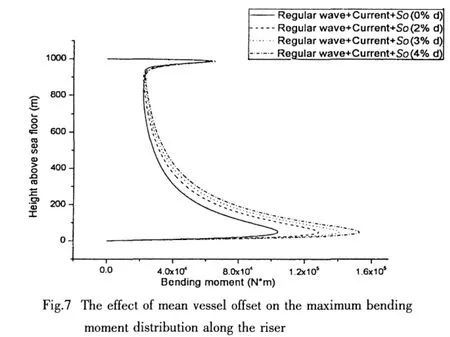
4.5 The effect of mean vessel offset on the dynamic response of the drilling riser

The effect of mean vessel offset on bending moment distribution of the drilling riser un-der current and regular wave(6.5m/8s)is presented in Fig.7.As shown in Fig.7 the mean vessel offset has remarkable influence on the lower maximum bending moment,located at depth about 50m.With the mean vessel offset increasing the lower bending moment increases considerably,while the upper maximum bending moment is insensitive to mean vessel offset.Under the condition that So=4%d,the lower maximum bending moment increased 47%,compared with that So=0m.
4.6 The effect of low frequency motion on the dynamic response of the drilling riser
To study the effect of low frequency motion and wave frequency motion on the dynamic response of the drilling riser,vessel motion are taken into account as low frequency motion and wave frequency motion respectively,and wave frequency motion to regular wave is assumed to be harmonic.
The effects of period and amplitude of low frequency motion on the dynamics of the riser,under current and regular wave(6.5m/8s),are shown in Figs.8-9 with mean vessel offset So=2%d.In the figures,Sl denotes the amplitude of low frequency motion,and Tl denotes the period of low frequency motion.
Fig.8 illustrates the effect of amplitude of low frequency motion on the maximum bending moment distribution along the riser,with Tl=200s.As shown in Fig.8,the bending moment of the riser increases with the amplitude of low frequency motion.Under the condition that Sl=15m,the upper and lower maximum bending moment increased 39%and 11%,respectively,compared with that Sl=0m.
Fig.9 indicates the effect of period of low frequency motion on the maximum bending moment distribution along the riser,with Sl=10m.It can be seen from Fig.9 that the period of low frequency motion mainly affects the bending moment distribution of upper portion of the drilling riser.With Tl increasing,the maximum bending moment of the riser decreases.
4.7 The effect of wave frequency motion on the dynamic response of the drilling riser
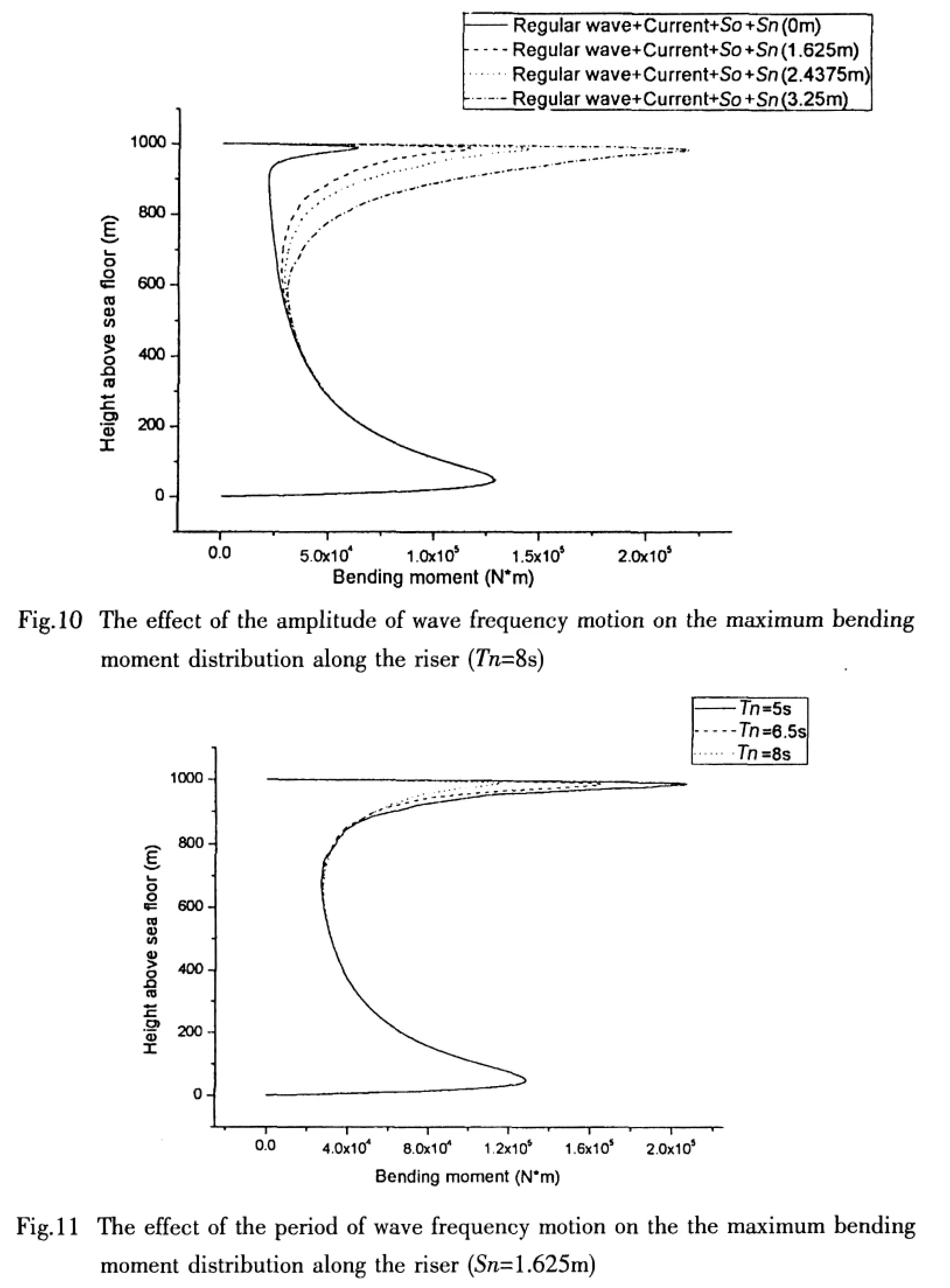
The effects of the amplitude and period of wave frequency motion(assumed to be harmonic)on the dynamic response of the drilling riser,under current and regular wave(6.5m/8s),are shown in Figs.10-11,with mean vessel offset So=2%d.In figures,Sn denotes the amplitude of wave frequency motion to regular wave,and Tn denotes the period of wave frequency motion.
Fig.10 illustrates the effect of amplitude of wave frequency motion on the maximum bending moment distribution along the riser,with Tn=8s.As shown in Fig.10,the wave frequency motion has an important influence on the upper bending moment of the riser.The maximum bending moment of the riser increases notablely with the amplitude of wave frequency motion increases.Under the condition that Sn=3.25m,the upper and lower maximum bending moment increased 246%and 0.6%respectively,compared with that Sn=0m.
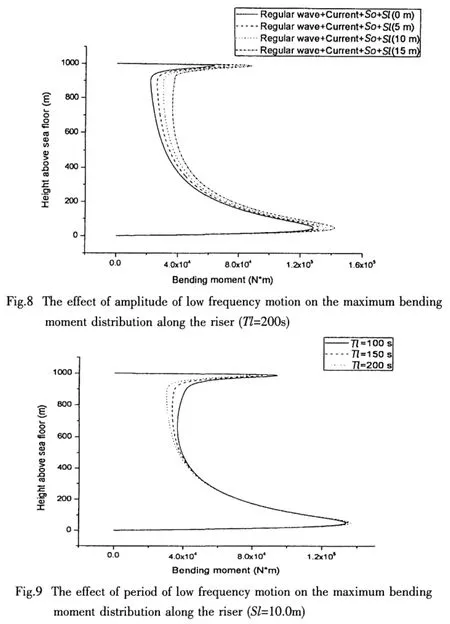
Fig.11 indicates the effect of period of wave frequency motion on the maximum bending moment distribution along the riser,with Sn=1.625m.It can be seen from Fig.11 that the period of wave frequency motion has an important influence on the upper bending moment of the riser,just as the amplitude of wave frequency motion.With Tn increasing,the maximum bending moment of the riser decreases sharply.From these two figures,it can be concluded that wave frequency motion is the major factor in determining the upper maximum bending moment of the drilling riser.
5 Conclusions
The effects of the vessel motion on the dynamic response of deepwater drilling riser have been investigated.The dynamic response was obtained in time domain by solving the fourthorder partial differential equation,and the effects of mean vessel offset,low frequency motion and wave frequency motion to both regular and random waves have been studied.The following conclusions were derived:
(1)The horizontal motions of the vessel is a major factor in determining the dynamic response of the deepwater drilling riser,and the motion characteristic of the vessel in waves is a significant factor in determining riser design.
(2)Mean vessel offset mainly affects the lower maximum bending moment,located at depth about 50m.
(3)Wave frequency motion has notable effect on the upper maximum bending moment of the drilling riser,and increases sharply with amplitude of the wave frequency motion increasing or period of the wave frequency motion decreasing.
(4)Low frequency motion mainly affects the upper maximum bending moment of the drilling riser,and increases with amplitude of the low frequency motion increasing or period of the low frequency motion decreasing.
[1]DNV.Dynamic Risers[S].DNV-OS-F201,2001.
[2]Burke B G.An analysis of marine risers for deep water[R].SPE4443,1974.
[3]Heuze L R,Chaussumier D,Guesnon J,et al.A 4,000-foot riser[J].Journal of Petroleum Technology,1976(4):489-496.
[4]Sexton R M,Agbezuge L K.Random wave and vessel motion effects on drilling riser dynamics[C]//The Eighth Annual Offshore Technology Conference.Houston,Texas,USA.OTC2650,1976:391-398.
[5]Kirk C L,Etok E U.Dynamic and static analysis of a marine riser[J].Applied Ocean Research,1979,1(3):125-135.
[6]Patel M H,Sarohia S.Finite-element analysis of the marine riser[J].Engineering Structures,1984,6(3):175-184.
[7]Kirk C L.Dynamic response of marine risers by single wave and spectral analysis methods[J].Applied Ocean Research,1985,7(1):2-13.
[8]Ahmad S,Datta T K.Nonlinear response analysis of marine risers[J].Computers&Structures,1992,43(2):281-295.
[9]Ahmad S,Datta T K.Dynamic response of marine risers[J].Engineering Structures,1989,11(3):179-188.
[10]Atadan A S,Calisal S M,Modi V J,Guo Y.Analytical and numerical analysis of a marine riser connected to a floating platform[J].Ocean Engineering,1997,24(2):111-131.
[11]Kuipera G L,Brugmansb J,Metrikine A V.Destabilization of deep-water risers by a heaving platform[J].Journal of Sound and Vibration[J/OL].doi:10.1016/j.jsv.2007.05.020.
[12]McIver D B,Olson R J.Riser effective tension-Now you see it,now you don’t![C]//ASME Proceedings of the 37th Petroleum Mechanical Engineering Workshop&Conference.Dallas,TX,1981:177-187.
[13]Seon Han.Vibration of a compliant structure in an ocean environment[D].A dissertation for the degree of doctor,The State University of New Jersey,2001.
平台运动对深水钻井隔水管非线性动力响应的影响
王 腾,张修占,朱为全
(中国石油大学(华东)海洋工程系,山东 东营 257061)
文章建立了波浪、海流和船体运动等载荷综合作用下的深水钻井隔水管非线性时域动力响应模型,模型考虑了顶部张力和隔水管内部泥浆对隔水管动力响应的影响,计入了张力沿隔水管长度的变化,并采用有限差分法求解了四阶偏微分运动方程。计算了随机波浪和规则波浪下船体运动对深水钻井隔水管非线性动力响应的影响,研究分析了船体平均偏移以及波频响应和低频响应的周期和幅值对深水钻井隔水管动力响应的影响。结果表明,船体运动对深水钻井隔水管动力响应有较大的影响,在随机波浪和海流作用下,考虑船体运动时,隔水管上部最大弯矩增大了59%。船体的平均偏移主要影响底部最大弯矩。船体波频运动对上部最大弯矩有较大影响,随着波频响应的周期和幅值的变化,上部最大弯矩变化较快,而低频响应的则主要影响隔水管上部弯矩。
钻井隔水管;深水;船体运动;非线性动力
U674.38+1
A
王 腾(1973-),男,博士,中国石油大学海洋工程系教授,主要从事海洋工程方面的教学和科研工作;
朱为全(1981-),男,中国石油大学海洋工程系硕士研究生,主要从事深水立管非线性振动响应分析。
U674.38+1
A
1007-7294(2010)06-0606-13
date:2009-02-16
Supported by a grant from the National Hi-Tech “863” Plan Fund(2006AA09A106)
张修占(1983-),男,中国石油大学海洋工程系硕士研究生,主要从事深水立管非线性振动响应分析;
猜你喜欢
杂志排行
船舶力学的其它文章
- A Rule of Spatial Sampling on Cylindrical Shells for Predicting Radiated Acoustic Field
- Investigation on Sloshing Effects of Tank Liquid on the FLNG Vessel Responses in Frequency Domain
- Effect of Plastic Zone Size Induced by a Single Dwell Overload on the Fatigue Crack Growth Rate under Cyclic Loading
- Research of Vertical Bending Moment in Amidships Calculation Method Caused by the Crash-breaking Way
- Thrust Allocation with Dynamic Forbidden Sectors in Dynamic Positioning System
- Study of Vortex Induced Characteristics of Multi-columns with Low Mass Ratio