BP神经网络在城市有轨电车GPS/RFID组合定位中的应用研究
2014-06-07米根锁
罗 淼,米根锁
(兰州交通大学自动化与电气工程学院,兰州 730070)
BP神经网络在城市有轨电车GPS/RFID组合定位中的应用研究
罗 淼,米根锁
(兰州交通大学自动化与电气工程学院,兰州 730070)
在城市有轨电车定位系统中,单一的GPS定位方式已很难满足电车连续精确定位的要求。采用GPS和RFID组合定位的方法,可实现在弱信号环境下的连续精确定位。针对GPS/RFID组合定位时,因加入RFID观测值带来的较高计算复杂度而引起定位时间延长,以及对系统定位误差影响不确定性等问题,建立基于BP神经网络的城市有轨电车GPS/RFID组合定位模型。仿真结果表明,采用BP神经网络进行分析时,将GPS和RFID观测值归一化后输入到训练好的网络中,可以在较短的时间内得到可靠的网络输出。经训练后的网络输出较未经训练的输出更接近于期望值,且更为稳定,证明在GPS信号受遮挡条件下城市有轨电车定位系统的定位精度和定位时长得到了有效改善。
城市有轨电车;GPS/RFID组合定位;BP神经网络;定位精度
1 概述
电车定位子系统是城市有轨电车运营系统中的重要组成部分,是调度中心与运行电车实现信息交互,保证城市有轨电车系统高效运行的必要条件。电车定位常用方式有查询应答器定位、通信环线定位、GPS定位等,目前采用较多的是GPS定位方式。
GPS定位是一种全球、全天候连续的三维定位,可为各类用户提供动态目标的位置、速度和时间信息[1]。但是在城市高楼区、高架桥下、林荫道及隧道内可能会出现暂时的定位盲点,不能用GPS实现准确连续定位。为了确保电车的精确连续定位,在GPS基础上引入RFID(Radio Frequency Identification)技术,实现GPS/RFID组合定位。
目前对于城市有轨电车GPS/RFID组合定位的定位精度研究还处于起步阶段,只是单纯阐述GPS和RFID可以结合起来完成定位,并未探讨加入RFID观测值对定位精度的影响。采用相同观测时刻所采集的GPS和RFID观测值进行联合解算时,若GPS和RFID观测值数量较多,会使定位方程数量增多,平均方程维数增加到9维,给系统带来较大的计算复杂度,影响定位实时性和精度,而且RFID观测值会因RFID天线增益、RFID标签位置的影响引入较大误差。本文探索性的采用BP神经网络对城市有轨电车GPS/RFID组合定位进行分析,利用BP神经网络误差反向传播,使网络误差平方和最小,以达到要求的指标,可有效提高GPS/RFID组合定位的定位精度。
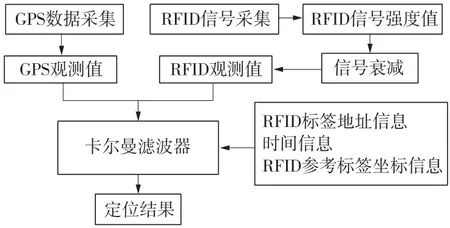
图1 GPS/RFID组合定位工作原理
2 GPS/RFID组合定位原理
RFID系统主要包括3部分:应答器标签、阅读器和天线,系统基于接受信号强度进行定位[2]。RFID定位方法包括fingerprinting、LANDMARC及CoO(Cell of Origin)等[3]。本文基于RFID信号强度定位观测值与GPS观测值相结合进行解算来实现GPS/RFID组合定位。在GPS定位信号受遮挡区,按照地形特点设置1组RFID参考标签,参考标签采用主动式RFID标签,信号强度检测临界为-75 dBm,相应信号传输长度为20~30 m,适用于较长距离的定位。当电车经过RFID标签区域时自动检测来自RFID标签的数据,与GPS定位数据相结合定位有轨电车。若GPS信号完全被遮挡,采用RFID单独定位,若没有检测到RFID标签信息,采用GPS单独定位。
首先将每个RFID标签的位置坐标按照标签序号进行存储,这样可以避免RFID标签和读卡器之间的大量信息传输,仅传输参考标签的地址信息、RFID信号强度值等信息,阅读器读到标签地址后,便可在系统数据库中查找相应的数据信息。
通过信号衰减将电车采集到的RFID信号强度值转化为RFID观测值(参考标签和移动读卡器间的几何距离),然后将RFID和GPS观测值相结合做出联合解算,经过Kalman滤波器处理最终得到城市有轨电车的位置坐标。GPS/RFID组合定位工作原理如图1所示。
当前,RFID系统不能直接提供标签信号强度,仅能检测其能量等级,因此必须通过信号强弱来表示几何距离。根据理论测试传播模型可知,对数常态损耗模型与实际环境较为相符,根据此模型,功率路径损耗公式为[4]

假设为理想状态,Xσ为遮蔽因子,其均值为0,标准差为σ的正态随机变量;PL(d)为接收时衰减的信号强度;PL(d0)为d0距离时接收到的信号强度,即单位距离的自由空间损耗;n为路径衰减因子,在自由空间n为2,室内为1.6~1.8,有障碍物时n增大。
当n=2时,推导出RFID参考标签与RFID移动读卡器之间的距离为^d

其中,ΔS=S(d0)-S(d)为降低的信号强度,dBm。
城市有轨电车定位系统在各坐标轴方向上允许的最大定位误差可达到5 m,当径向误差小于8.667 m时,定位精度相对较高,定位可用性达到100%[5]。表1列出了在可以检测到RFID标签观测值时间段内GPS单独定位、RFID单独定位以及GPS/RFID组合定位相对于同一点的定位结果比较。以径向误差为主要分析指标,GPS单独定位时定位误差很大,径向误差达到了264.8 m,此时GPS信号受到严重遮挡,定位可用度仅为7.09%。若采用RFID单独定位,由于环境中动态物体的影响,对定位精度产生了一定影响,径向误差也达到了10.38 m,定位可用性为97.4%。当采用GPS/RFID组合定位时,径向误差仅为3.9 m,定位可用度达到100%,定位精度有了大的提高。
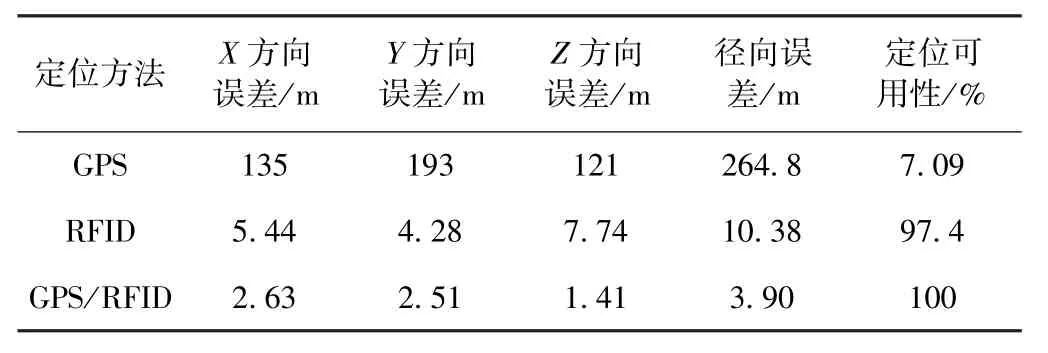
表1 不同定位方式结果比较
3 BP神经网络在GPS/RFID组合定位中的应用
3.1 增加单个RFID观测值对有轨电车定位的影响
在城市有轨电车GPS/RFID组合定位系统中,由于RFID标签四周动态事物的影响,各RFID的天线增益在不同方向上会存在差异,使每个RFID测距的误差不同。本文分析了增加单个RFID观测值对定位精度的影响。
在GPS定位盲区,信号受遮挡较为严重,当RFID观测值和GPS观测值相结合进行解算时,可减小GDOP值(几何精度因子)并提升定位可用性。本文主要针对GDOP值的变化进行了理论研究,要减小电车定位误差就要尽量减小GDOP[6]。为从m颗卫星中去掉第i颗卫星(i=1,2,…,m)得到的m-1颗卫星观测矩阵,Hm为增加一个RFID观测值后的观测矩阵,增加的RFID观测矢量为:hi=[exieyiezi0],两者有如下关系
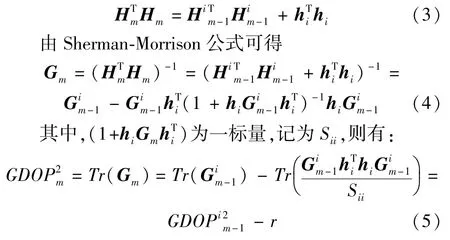
增加一个RFID观测值后,对减小GDOP值的贡献为r,则有

式(4)也可以改写为

根据矩阵反演公式,易证

一般情况下,GPS观测值和RFID观测值精度不同,在加入单个RFID观测值之后,定位系统的误差推导公式,如式(9)所示。

其中,cov(dx)为三维电车位置坐标和时间估计误差的协方差;σRi和σUERE分别为RFID和GPS观测值的观测误差标准差。

由式(10)知,等式右边第二项为增加了一个RFID观测值后对GDOP的贡献。卫星观测数m≥4时,Tr(GmGm)>0[5]。所以当时,增加单个RFID观测值会使GDOP值减小,但等式右端第三项仍有可能会使系统的定位误差增大。因此,本文把式(10)右边后两项统称为增加单个RFID观测值对系统误差的贡献。
3.2 BP神经网络的模型与结构
BP神经网络是一类多层前馈神经网络,在网络训练过程中,调整网络权值的算法为误差反向传播学习算法,网络由输入层、隐层、输出层组成[8]。
BP神经网络分为正向传播和反向传播,正向传播中,输入信号从输入层经隐层传向输出层,若输出层得到了期望的输出,学习算法结束;否则,转至反向传播,将误差信号按原来连接通路反向计算,调整各层神经元的权值和阈值,使信号误差减小,其网络结构如图2所示。
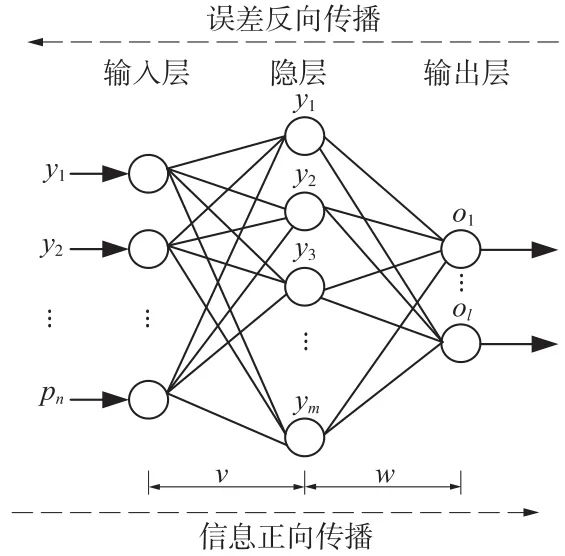
图2 BP神经网络结构
图2中,BP神经网络的输入向量P=(p1,p2,p3,…,pn)T,输入层和隐层之间的连接权向量为:V=(v1, v2,v3,…,vm)T;隐层和输出层输出向量分别为:Y=(y1,y2,y3,…,ym)T、O=(o1,o2,o3,…,ol)T,隐层和输出层之间的连接权向量为:W=(w1,w2,w3,…,wl)T。
当BP网络正向传播时,隐层中各神经元阈值为θj(j=1,2,…,m),输出可表示为[9]


BP神经网络神经元传递函数采用Sigmoid型函数

在信息正向传播后,BP神经网络输出若没有达到期望值,则进行误差反向传播,以修正各层网络的权值w,v和阈值θ′,θ。让网络总误差达到设定的目标值,从而使得GPS/RFID定位系统更加精确。采用梯度下降法修正权值和阈值来改善网络训练速度和精度,计算速度快,更有利于定位的实时数据处理。因此,利用基于BP神经网络的GPS/RFID定位算法来获得的定位信息,能更有效地提高系统的定位实时性和精确性。
3.3 基于BP神经网络GPS/RFID组合定位模型的仿真
(1)输入数据的归一化处理
现场的样本数据中各个指标相互不同,各向量的数量级差别很大,为了方便计算,使各指标在整个定位系统中具有可比性,将样本的输入进行归一化处理,将数据处理为[0,1]之间的数据。归一化的方式有若干种,本文按式(15)处理[10]。

其中,x*为归一化后的输入数据;x为原输入数据;xmin、xmax分别为各指标数据中的最小值和最大值。
(2)网络拓扑结构的确定
GPS/RFID组合定位分析中采用的BP神经网络模型含有1个输入层包括同一时刻GPS的观测值和RFID观测值组成的9维方程式,故有9个输入层节点、1个输出层含1个输出层节点。采用多隐含层可降低误差,提高精度,同时也会使网络更复杂,增加网络中权值和阈值训练的时间。实际中可以通过增加隐层的节点数来提高精度,训练的效果比增加隐层数更容易调整和观察。所以本文采用单隐含层的网络结构,选择典型的三层BP神经网络。
隐含层节点数通常是根据经验及训练样本维数而确定,经验公式如式(16)所示[11]

其中,N2为隐层节点数;T为训练样本的维数。
根据计算,可得隐层节点数为12,所以该网络的拓扑结构为9×12×1。
(3)主要参数的选择
根据城市有轨电车定位系统的特点,对BP神经网络模型的主要参数选择如下:网络训练函数,采用OSS(One Step Secant)算法,所对应的函数为trainoss (),该算法的计算量和内存需求量都较少,并且有较快的收敛速度;神经元传递函,采用tansig()与purelin ()函数;性能函数,选择MSE(mean squared error)函数,MSE表示均方误差;学习速率为0.05;动量系数为0.9;训练步长为5;最大训练次数为3000;目标误差设置为0.001;其他参数均为缺省值。
(4)网络训练
以海珠区环岛城市有轨电车试验段的相关情况为例,RFID标签被安装在华南大桥站。通过对现有GPS定位观测值的监测,结合RFID观测值,创建训练样本。由于GPS/RFID组合定位精度与样本的数量直接相关,建立97组学习样本输入到有轨电车GPS/RFID组合定位分析的网络中训练。在97组样本中随机抽取90组作为训练样本,剩余7组作为测试样本。利用MATLAB7.0平台对BP神经网络进行训练。网络误差变化情况如图3所示。
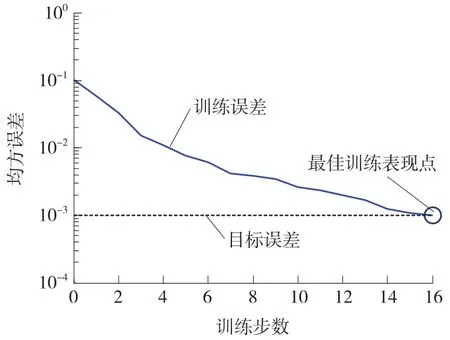
图3 网络误差训练变化曲线
由图3可知,网络训练16步后就已取得了较好的收敛效果。经过大量验证,16步为最大收敛步数。训练样本的误差随着训练的延续逐渐减小,最终趋于目标值。
网络学习之后网络的输入层节点数、隐层节点数、输出层节点数与网络连接权值的相关数据都包含在有轨电车GPS/RFID组合定位分析的知识库中。对GPS和RFID观测值归一化后,再经过BP神经网络训练得到网络输出值,视作BP神经网络中新的学习样本,完善了定位分析知识库。
4 结果分析
在经过训练的BP神经网络中输入GPS观测值和RFID观测值,可以根据网络输出值判断定位精度[12]。定位精度分为4个等级,如表2所示。
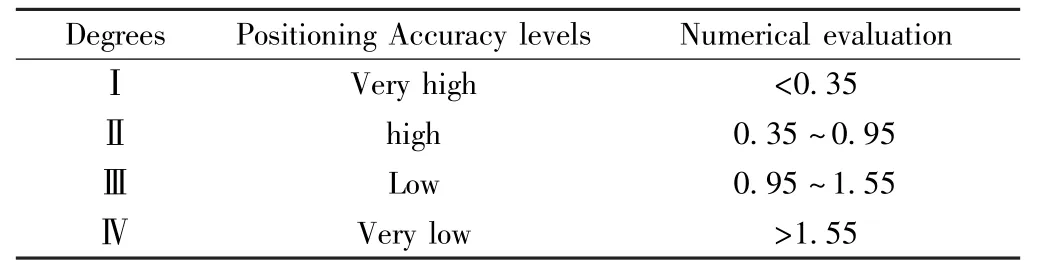
表2 定位精度等级评估
为验证BP神经网络的性能,将7组实际观测值输入到训练后BP神经网络中。表3为测试样本的原始数据,用式(15)的方法对表3中的原始数据进行归一化处理,处理结果如表4所示。
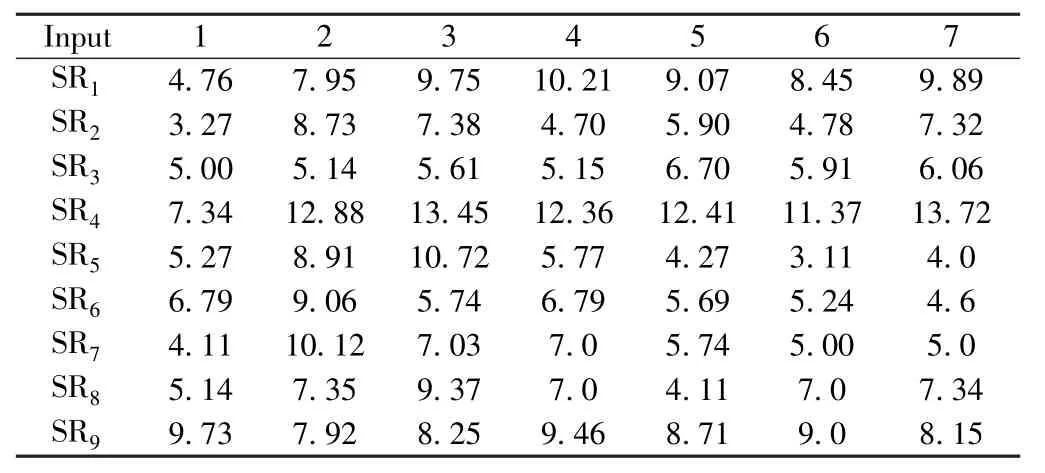
表3 测试样本原始数据
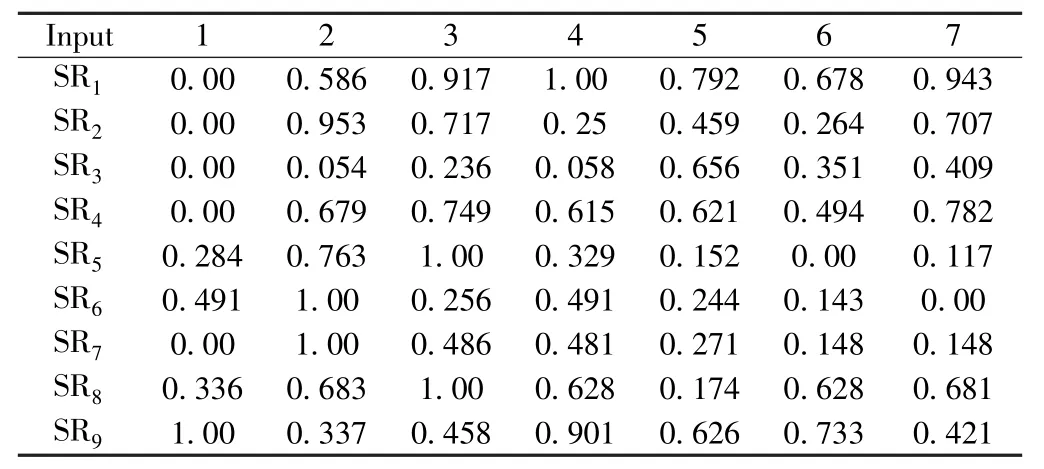
表4 归一化处理后的测试样本数据
采用BP神经网络对网络误差进行训练后,网络输出保持在较为稳定的水平,使得整个有轨电车定位系统解算出的电车位置信息更准确。表5列出7组经过BP神经网络训练后的网络输出与未经训练的网络输出结果比较。
从表5可见,GPS/RFID组合定位在经过BP神经网络训练后的网络输出比未经训练的网络输出值更接近目标值,且定位精度等级更高。未经训练的网络输出仅第4组达到了I级,其余6组的定位精度都相对较低,而网络训练后的输出都达到了I级定位精度,确保了有轨电车更加精确的连续定位,证明将BP神经网络用于有轨电车GPS/RFID组合定位中可使有轨电车定位更加精确。

表5 未经训练网络输出与训练后网络输出比较
5 结语
针对有轨电车在受遮挡区域GPS定位精度较差的问题,引入了GPS/RFID组合定位方式,但在采用GPS/RFID组合定位方式时,会因RFID观测值的加入导致计算复杂度增大,从而影响系统定位实时性,系统定位误差变化不确定等问题。BP神经网络具有较好的模式识别和非线性处理能力,能通过学习从大量复杂的数据中发现规律,提高运算速度,为解决GPS和RFID观测值联合解算提供了理论支持,实例验证的结果表明,本文提出的基于BP神经网络的有轨电车GPS/RFID组合定位分析具有较高的理论性和可行性。BP神经网络的误差反向传播调整使得系统的定位误差减小并快速收敛到目标值,在GPS信号受到较为严重遮挡时大幅度地提高了定位可用性,能实现在GPS弱信号区域加入RFID观测值后有轨电车精确的连续定位,提高了城市有轨电车定位系统的精度,有效保障了城市有轨电车的安全运行,可在一定程度上改善城市轨道交通的运营水平。
[1] Kaplan E D,Hegarty C J.Understanding GPS:principles and applications[M].2nded.Norwood,MA,ArtechHouse, Montreal,2006.
[2] Fu Q.Active RFID for position using trilateration and location fingerprinting basedonRSSI[C]∥Proceedingsofthe 21st International Technical Meeting of the Satellite Division.Savannah, Georgia,USA,2008:80-87.
[3] Ni L M,Liu Y,Lau Y C,et al.LANDMARC:indoor location sensing using active RFID[J].Wireless Networks,2004,10: 701- 710.
[4] Rappaport T S.Wireless communications:principles and practice [M].Prentice Hall PTR,Upper Saddle River,USA,1996:64.
[5] 张其善,吴今培,杨东凯.智能车辆定位导航系统及应用[M].北京:科学出版社,2002:20-52.
[6] 从丽,Abidat A I,谈展中.卫星导航几何因子的分析和仿真[J].电子学报,2006,34(12):2204-2208.
[7] 刘瑞华,刘建业,姜长生.利用人工神经网络仿真GPS误差信号[J].南京航空航天大学学报,2001,33(2):176-178.
[8] 李松,解永乐,王文旭.AdaBoost_BP神经网络在铁路货运量预测中的应用[J].计算机工程与应用,2012,48(6):233-234.
[9] 辛晶,夏登友,康青春.BP神经网络技术在交通工具火灾预警中的应用[J].中国安全科学学报,2006,16(11):29-33.
[10]刘英英,徐香坤,魏静敏,金亚玲.BP神经网络在差分GPS定位技术中的应用[J].东北大学学报:自然科学版,2008,29(11): 1536-1539.
[11]胡郁葱,徐建闽,吴一民.基于BP神经网络的车辆定位融合模型[J].华南理工大学学报:自然科学版,2004,32(2):46-49.
[12]B Hofmann Wellenhof,Herbert Lichtenegger,Iames Collins.Global positioning system:theory and practice[M].4tt ed.Michigan: Springer-Verlag,1997.
Application of BP Neural Network to the Analysis of Positioning Deviation on City Trams
LUO Miao,MI Gen-suo
(College of Automatic&Electrical Engineering,Lanzhou Jiaotong University,Lanzhou 730070,China)
It is difficult to realize the continuous and precise positioning in the positioning system of city trams only by GPS,while it can be performed with the integration of GPS and RFID in the environments with weak signals.A model of GPS/RFID integrated positioning of city trams with the application of BP neural network is established to solve the problems of prolonged positioning caused by high computation complexity and the uncertainties of the impact on the system positioning errors with the introduction of RFID observations in GPS/RFID integrated positioning.The analysis indicates that the reliable network output values are to be obtained in a short period of time after the input of the normalized GPS and RFID observations into the trained network in positioning analysis with the application of BP neural network. The output values of the trained network,which are more stable and closer to the expectations than the ones of the untrained network,demonstrate the improvement of positioning accuracy and the shortening of positioning time in the positioning system of city trams under the condition of blocked GPS signals.
City trams;GPS/RFID integrated positioning;BP neural network;Positioning accuracy
U482.1
A
10.13238/j.issn.1004-2954.2014.12.030
1004-2954(2014)12-0125-05
20140226
甘肃省自然科学基金项目(1310RJZA046)
罗 淼(1989—),女,硕士研究生,E-mail:luomcn@ foxmail.com。