基于遗忘因子RLS算法的自适应直达波对消技术
2014-06-07许德刚
许德刚
(中国电子科技集团公司第38研究所,合肥 230088)
基于遗忘因子RLS算法的自适应直达波对消技术
许德刚
(中国电子科技集团公司第38研究所,合肥 230088)
在以民用广播、电视及CDMA等信号为照射源的无源雷达系统中,由于发射信号为连续波信号,直达波和多径信号对雷达回波的干扰很强,影响了目标的检测。为此采用RLS自适应对消处理技术来抑制直达波干扰,针对RLS自适应算法的性能分析,提出了改进RLS自适应处理算法,收到了良好的滤波效果。最后在以广播信号为照射源的实验系统中,根据实际采集的数据进行仿真论证,验证了该方法的可行性。
无源雷达;直达波信号;RLS算法;遗忘因子
0 引 言
外辐射源雷达是一种特殊体制下的双/多基地非合作雷达系统,其发射站为位置明确的民用广播信号[1-2]、电视信号[3]和CDMA信号[4]等发射台。雷达本身并不发射信号,因而不容易被敌方所侦查和干扰,提高了雷达的隐蔽性,同时雷达所利用的民用信号大多是低频段的信号,具有探测隐身飞机的能力。基于该雷达的反干扰强、抗反辐射导弹、反隐身及成本低等特点,国内外高校及研究机构相继进行了大量的研究和试验[2,5-7]。
该雷达主要利用电台信号的直达波与目标反射的回波信号进行多普勒相关处理来进行目标的检测和定位。由于系统与电台信号不能有遮挡,造成天线接收目标回波的同时,必然会接收到直达波信号和经高山及建筑物等反射的多径信号。虽然天线阵列的法线方向没有指向电台信号,但是通过反射和绕射所接收到的直达波信号仍远远大于目标所反射的回波信号,形成了很强的直达波干扰信号;同时由于雷达站周围的环境可能比较复杂,来自近距离不同固定物体所反射的多径信号也强于回波信号,大大影响了雷达的探测性能,其定位示意图,如图1所示。
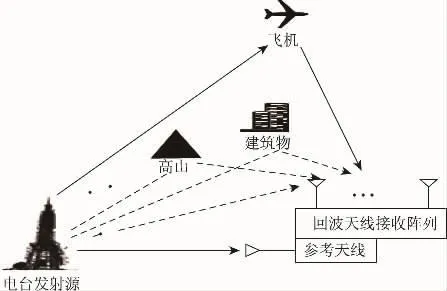
图1 基于外辐射源雷达的定位示意图
外辐射源雷达的直达波和多径杂波的抑制问题,基本上可分为时域和空域干扰抑制处理,文献[8,9]提出的最小均方归一化算法(NLMS)来抑制直达波和多径信号,该算法运算量小,易于实现,但收敛速度慢,对于快变干扰信号的抑制效果不是很理想。文献[1]提出了基于梯度自适应格型滤波的杂波抑制技术,该方法构造正交的杂波子空间,虽然收敛速度较NLMS算法快,但需根据经验来设置步长参数,若选取不合理则会导致算法收敛慢或发散。文献[7,10,11]提出利用自适应零点技术来实现干扰抑制,当干扰信号较少而且干噪比大时能有一定的效果,但自适应零点技术受到通道的误差影响比较大,干扰源较多时抑制效果变差。针对这些问题,本文提出基于遗忘因子改进型RLS算法来实现直达波和多径干扰的抑制,分析其优缺点,通过实际数据进行仿真分析,验证算法的工程可行性。
1 自适应RLS对消处理技术
1.1 自适应RLS的算法原理
外辐射源雷达主要是利用回波信号与参考信号的长时相干积累处理来探测目标,由于回波信号很弱,而回波通道接收到的信号含有大量的多径信号和很强的直达波信号,严重影响了目标信号的检测,因此抑制直达波和多径干扰信号尤为重要,直接影响着雷达系统的性能。为此采用自适应信号处理的方法,通过实时更新自适应滤波器的系数得到抑制干扰信号的目的,而自适应信号处理的方法有很多种,比如递推最小二乘(RLS)算法[12-13]、卡尔曼滤波(Kalman)算法[14]、最小均方(LMS)误差算法[15-16]、盲自适应算法[17]等。其中递推最小二乘(RLS)算法的抑制处理效果及工程实现得到了很好的应用。
自适应RLS算法在第k个采样点对应的一组输入信号xk(i),i=0,1,…,N,那么算法对应的输出为

式中,N为滤波器的阶数;ek为误差项;w(i)是滤波器的第i项系数。
该算法的目的是在k=0,1,…,m-1各个采样时刻,使得最小平方误差为最小时,根据给定的输入xk(i)和输出yk解算出对系数W的最佳估计值为

式中,Ym=[y0,y1,…,ym-1]T;Xm=[xT(0),xT(1),…,xT(m-1)]T;Wm=[w(0),w(1),…,w(m-1)]T。
在式(2)中需要实时计算求逆矩阵,计算量很大,实时处理很难实现。由于采样数据在不断更新,使用递归最小平方算法,每次可以用新采集到的数据来更新对Wm的估计,从而避免了矩阵求逆运算,因此对最小平方误差作指数加权修正为

为此可以逐步消除原始数据的影响并跟踪信号的缓慢变化特性,最后导出递归最小平方算法的表达式为

式中,Pk是计算[Xk]-1的递归项;Gk=(ak)-1Pk-1X(k);ek=yk-XT(k)Wk-1;ak=λ+XT(k)Pk-1X(k)。
根据算法设计要求,得到RLS处理方法的算法流程如下。
步骤1 初始化
W0=0,P0=δ2I,(其中δ为很小的正常数,I为单位矩阵)
步骤2 权值更新

该算法为迭代型计算,所以在迭代式以外,还要关注变量的初始值设置,在实际工程应用中根据经验来设定则一般可获得到较快的收敛效果。
1.2 遗忘因子λ对RLS算法性能的影响
在RLS算法中遗忘因子λ主要用来增加当前数据的权重,用以增加对非平稳信号的适应性[14],表现滤波器对输入特性变化的自适应快速反应能力,因此假如遗忘因子的值比较小,则在滤波过程中输出的误差信号较接近于输入的期望信号,从而导致滤波器的滤波效果较差。
在常规的递推最小二乘算法中,遗忘因子λ是固定值。通过分析RLS算法的迭代公式发现,遗忘因子λ值越大,式(6)中的G值就越小,导致在式(9)中计算W各系数的更新幅度就越小,从而导致滤波器的收敛速度较慢;同理若λ值越小,收敛速度就越快,但收敛后会受到杂波的严重影响,从而使滤波器的收敛精度不高。在实验系统中通过对实际采集的数据进行仿真分析,得到不同遗忘因子对收敛速度的影响及对目标检测结果的影响如图2所示。
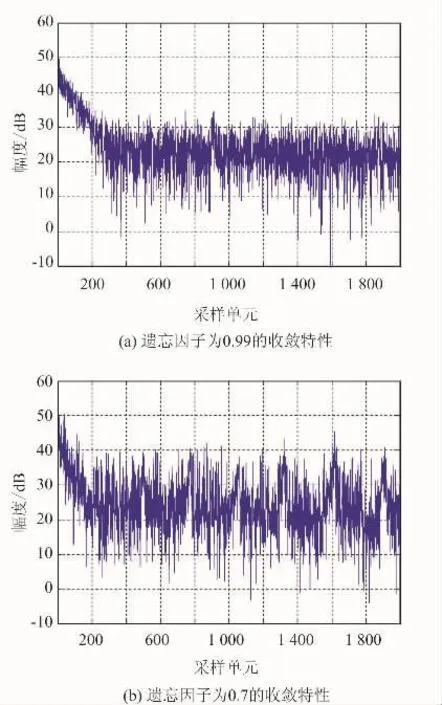
图2 遗忘因子对目标检测的影响
从图2所示的结果来看,遗忘因子为0.7时信号收敛较快,大约150个采样点即可收敛,但收敛精度相对较差,信号起伏较大;而当遗忘因子为0.99时信号收敛精度相对较好,稳态误差比较小,但收敛速度较慢,大约300个采样点才能收敛;另外当λ>1或λ<1时,该滤波算法不收敛或发散。因此实际工程应用中该算法遗忘因子总是采用接近于1的值,这样虽然获得了较高的收敛精度,但却限制了收敛速度的进一步提高,所以针对收敛速度和收敛精度之间的矛盾提出了基于遗忘因子改进的RLS对消处理算法来解决收敛速度的问题。
2 改进RLS对消处理算法
在自适应RLS算法中遗忘因子λ同最小均方误差(LMS)算法中步长μ的作用相似,在常规处理算法中根据经验值来选择λ,不能实时调整来满足系统要求,因此通过引入遗忘因子函数来解决这一问题。根据λ与信号误差的关系来实时调整λ值,当输入误差E(n)较大时,应调整λ值使其较小而加快收敛速度;当输入误差E(n)较小时,应调整λ值使其较大而获得较好的收敛精度。根据这一调整原则的设计函数为

在式(10)中的函数里根据E(n)2来调整遗忘因子,因为E(n)2≥0,所以βexp(-δE2(n))≤β,而在自适应RLS算法中要求0<λ(n)≤1,因此β的值一般选为1。根据式(10)的计算:若δ值越大则该算法的收敛速度相对较快,但是在初始状态下,若δ值过大,那么λ(n)值相对较小,在迭代计算中调整过大而不利于算法的快速收敛;若在算法收敛后δ值仍然过大,则会导致λ(n)较小从而导致算法的稳态精度变差,实际的工程应用中一般根据实际采集的数据来确定δ的最佳值。在RLS自适应算法中利用误差信号E(n)来更新滤波器的系数,使其得到最佳滤波系数,但是若只利用E(n)来调整遗忘因子λ(n),可能会出现误差信号使滤波系数偏离理想值。因此还需要调整遗忘因子函数:在系统初始条件下使λ(n)值较小而加快收敛速度;当接近收敛时使λ(n)值较大而获得较好的收敛精度。因此改变遗忘因子函数为

根据对遗忘因子函数的调整,对常规RLS滤波算法中式(6)和式(7)进行修正,得到了改进的RLS算法为
利用实验系统所采集的实际数据进行仿真分析,其中图3(a)表示按改进型算法得到信号的收敛过程;同上节中按不同固定因子得到信号的收敛过程(图2所示)相比较,可以看出利用改进遗忘因子的方法,在收敛速度和稳态精度都得到一定的提高。仿真试验表明,改进型算法的收敛速度远好于普通RLS算法,具有较小的参数估计误差,数值稳定性好,具有较强的工程应用价值。
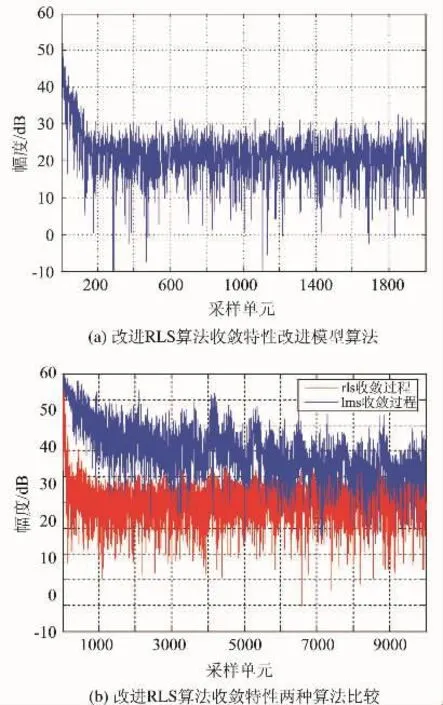
图3 改进RLS算法收敛特性及比较
同时对于改进RLS算法与其它自适应滤波算法进行比较,其中LMS算法以其计算简单易实现而受关注[9],但为了满足算法收敛和稳态误差的要求值不能取的太大,决定了收敛速度不快,而改进RLS算法对输入信号的自相关矩阵的逆进行递推估计更新,收敛速度快。以同样实际采集的外场数据信号对两种算法进行仿真分析,两种自适应滤波方法的阶数相同,得到两种算法收敛性能如图3(b)所示。从图可以很清楚的看出,LMS算法的收敛速度与改进型RLS算法的收敛速度是不能相比的:LMS经过近1 500次迭代才收敛,而改进型RLS只需要100次迭代就已经收敛,而且经LMS算法处理后的信号起伏较大。因此从收敛速度和精度方面改进RLS算法都远远好于LMS算法。
根据改进RLS算法的分析,该算法提高了在外辐射源探测中对干扰信号的抑制,但改进RLS算法的运算量也相应变大。改进RLS算法采用自适应闭环处理技术,所需的复数乘法大约为(3N^2+4N+3)L,其中:N表示滤波器的阶数,L表示数据的长度,在系统设计中因为广播信号的带宽较窄约为100 kHz左右,信号的采样频率约为150 kHz即可满足要求,N的取值和周围环境有关,根据经验值一般取32即可。而在工程实现上选择的FPGA芯片能提供的乘法器较多,而且主频能达到200MHz以上,完全能满足算法的要求。比如 Altera的芯片4GX230 K提供了1 288个18×18的乘法器,按主时钟200MHz计算,相对于150 kHz的采样率,乘法器可以复用1 333次,采用10个乘法器即可完成,因此完全可以满足改进RLS算法的工程实现要求。
3 实验仿真分析
在以广播信号为外辐射源的目标探测系统中,同过采集主天线接收到的回波数据和参考天线接收到的直达波数据进行仿真分析。当改进RLS算法应用于实验系统中,不仅收敛速度得到了很大提高,而且很好的抑制了直达波干扰信号,利用该处理方法得到了对消前后回波数据的变化,如图4所示。对直达波干扰信号的抑制达到50 dB左右。在实验中利用经过改进RLS算法对消处理后的回波信号进行目标检测处理,得到的处理结果如图5所示,其中图5(a)为检测目标的距离维的显示结果,图5(b)为检测目标的速度维的显示结果。从图中可看出检测结果共发现了四个目标,距离分别位于73.5 km、98.6 km、218.1 km和287.3 km;相应的径向速度为-164.6 m/s、-199.1 m/s、235.3 m/s和251.0m/s,其中最大目标的信杂比达到近30 dB左右。而用同样实验数据进行常规RLS算法的仿真分析,其结果如图6所示,其中6(a)为常规RLS算法中遗忘因子为0.99时的目标检测结果;6(b)为常规RLS算法中遗忘因子为0.7时的目标检测结果,从图中可看出:虽然遗忘因子为0.99的目标信杂比要好于遗忘因子为0.7的目标信杂比,但是只能检测到两个回波信号较强的目标,而另外两个相对较小的目标不能发现。实验表明改进型RLS算法的直达波对消处理不仅提高了收敛速度,而且也抑制了直达波和多径干扰信号,并且检测到常规RLS算法难以检测到的目标信号。
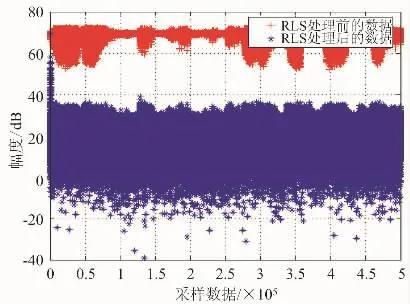
图4 改进RLS算法对干扰信号的抑制
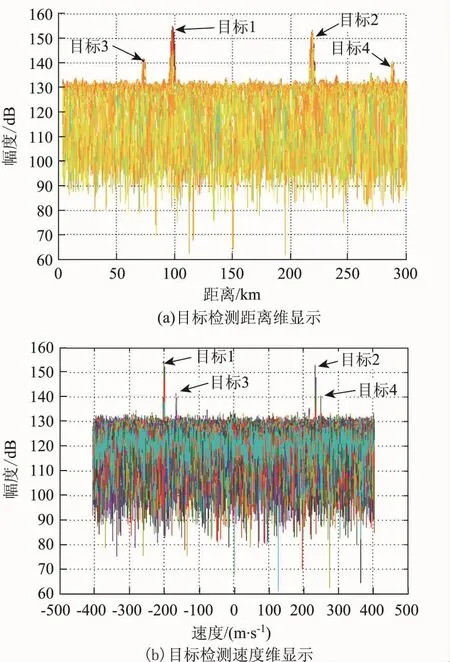
图5 改进RLS算法进行目标检测的结果
4 结 语
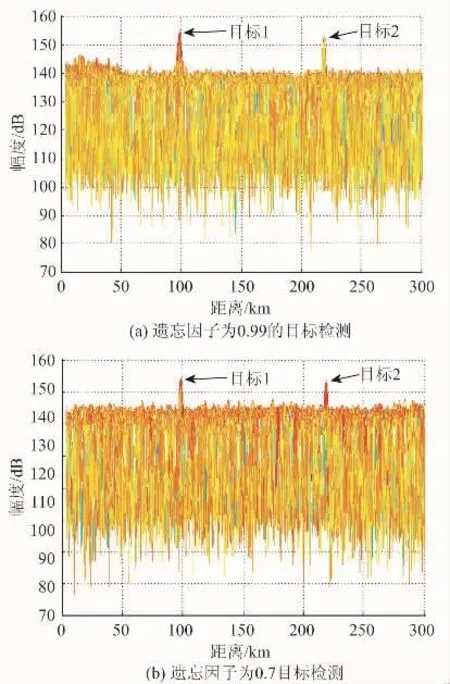
图6 常规RLS算法进行目标检测的结果
对RLS自适应滤波器的性能进行分析。RLS算法中遗忘因子对算法的收敛性能有很大影响,不恰当的参数有可能使得算法收敛性变差,甚至是不收敛。因此,分析算法的收敛性能很有必要。在实验系统中通过实际数据的仿真结果表明,RLS算法在提取信号时的收敛速度快、估计精度高、稳定性好,可较好地抑制振动,加快收敛速度,对非平稳信号的适应性较强,在迭代过程中产生的均方误差较小。提高了滤波的稳定性、快速性和精确性,实现了良好的滤波效果。
[1]HOWLAND PE,MAKSIMLUK D,REITSMA G.FM ra+ dio based bistaticradar[J].IEE Proceedings Radar,So+ nar and Navigation,2005,152(3):107+115.
[2]OLSEN K E,BAKER C J.FM+Based Passive Bistatic Radar as a Function of Available Bandwidth[C]//IEEE Radar Conference,Rome:[s.n.],2008:1537+1539.
[3]李飞,关唐新,赵洪立,等.基于DTV广播的外辐射源雷达对消算法研究[J].雷达科学与技术,2011,9(5):397:400.
[4]廖桂生,李天星,谷卫东,等.基于CDMA基站辐射源雷达的东目标检测方法[J].现代雷达,2008,30(9):29+32.
[5]王俊,保铮,张守宏.无源探测与跟踪雷达系统技术及其发展[J].雷达科学与技术,2004,2(3):129+ 135.
[6]ZhENG HENG ZhAO HONGLI,LIFEI.Accidental Ra+ dio Jamming Suppression in Passive Radar[C]//IEEE Radar Conference,Rome:[s.n.],2008:1833+1834.
[7]赵志欣,万显荣,邵启红,等.DRAM无源雷达多径杂波的分载波空域抑制[J].华中科技大学学报,2012,40(3):13+17.
[8]CARDINALL R,COLONE F,FERRETTL C,et al. Comparison of clutter and multipath cancellation tech+ niques for passive radar[C].Proc.of the IEEE Radar Conference,2007:469+474.
[9]许德刚,朱子平,洪一,等.自适应滤波在无源探测中对杂波抑制的应用[J].系统工程与电子技术,2006,28(2):202+204.
[10]RAOUT J,SANTORIA,MOREAU E.Space time clutter rejection and target passive detection using the APES method[J].IET Signal Processing,2010,4(3):298+ 304.
[11]ZARIFI K,AFFES S,GHRAVEB A.Collaborative NullSteering Beam forming for Uniform ly Distributed Wire+ less Sensor Networks[J].IEEE Trans on Signal Process+ ing,2010,58(3):1889+1903.
[12]刘梅,金龙.基于自适应RLS算法的系统辨识应用[J].中山大学研究生学刊,2013,34(1):80+88.
[13]ZAKHAROV Y,WHITEG,Low-complexity RLS algo+ rithms using dichotomous coordinate descent iterations[J].IEEE Transactions on Signal Processing,2008,56(7):3150+3161.
[14]何振亚.自适应信号处理[M].北京:科学出版社,2002.
[15]KIM H W,PARK H S,LEE S K,et al.Modified+fil+ tered+u LMS algorithm for active noise control and its ap+ plication to a shortacoustic duct[J].Mechanical Systems and Signal Processing,2011,25(1):475+484.
[16]田福庆,罗荣,李克玉,等.基于改进的双曲正切函数变步长LMS算法[J].系统工程与电子技术,2012,34(9):1758+1762.
[17]魏旻,龚耀云,张靖,基站阵列接收方案的一种盲自适应算法[J].信号处理,2003,19(6):573+575.
Adaptive Canceling Technique of Direct Arrival Signal Based on the Forgetting Factor RLS A lgorithm
XU De+gang
(The 38th Research Institute of CETC,Hefei230088,China)
In the passive radarsystem using a FM、TVand CDMA as radiant point,the radar echois greatly restrained by the direct arrival signaland multipath signal due to the continuous+wave signal,which influ+ ences the target detection performance.The recursive least square(RLS)adaptive processing method is adopted to restrain the effects ofthese clutters.The capabilities of RLS are analyzed,animproved RLS a+ daptive processing algorithm is given,and the efficacy of themethod is demonstrated.Finally,an experi+ mental system is discussed by regarding FM broadcast transmitter asnon+cooperative illuminator.Simula+ tion results by real collected data show that the application of thesemethodsenables better performance in target detection.
passive radar;direct arrival signal;recursive least squarealgorithm;forgetting factor
TN958.97
:A
:1673+5692(2014)06+614+05

10.3969/j.issn.1673+5692.2014.06.012
2014+08+26
2014+09+30
总装预研项目
许德刚(1971—),男,高级工程师,硕士,主要研究向为雷达信号处理。
E+mail:dgxu@163.com
