卡爪式水下连接器ROV作业接口技术研究
2014-06-01李志刚付剑波王宇臣
李志刚,付剑波,姜 瑛,张 飞,王宇臣
(海洋石油工程股份有限公司,天津300456)
开发应用
卡爪式水下连接器ROV作业接口技术研究
李志刚,付剑波,姜 瑛,张 飞,王宇臣
(海洋石油工程股份有限公司,天津300456)
在进行深水水下连接器的安装、维护和维修作业时,由于水深超出了潜水员安全作业的范围,需要采用远程遥控机器人(ROV)、使用相应的水下操作工具。因此,连接器及其操作工具上应设计合理的ROV操作接口。以在深水中应用最广泛的卡爪式水下连接器为例,分析了需要ROV执行的水下作业内容及所需的作业工具。总结了ROV水下作业时的固定方式、操作接口位置布置、操作空间要求及操作接口形式,结合卡爪式水下连接器的特点,推荐了其ROV操作接口的设计方法。
卡爪式水下连接器;ROV作业;作业接口;操作面板
水下连接器是深水油气田开发中的一项关键设备,用于水下采油树、管汇以及PLET(海底管线终端)等油气生产设施之间的连接,其性能对于保障深水油气田的安全开发和运营具有十分重要的作用。水下连接器的应用前景广、技术难度大、产品附加值高,目前市场被国外公司垄断。国内正在积极开展水下连接器产品的研发和攻关[1~5]。
由于水深超过了潜水员的安全作业范围,在进行深水水下连接器的安装、维护和维修作业时,需要通过ROV使用一系列的操作工具进行。为便于ROV操作,连接器及其操作工具上需要设置相应的ROV操作接口。ROV操作接口有多种形式,合理的接口设计对于保证水下作业的顺利完成具有重要意义。
1 水下连接器及ROV简介
水下连接器是海底管道及水下生产设施连接的装置,可以在水下环境实现快速连接,建立有效密封,与上下游设备形成封闭的油气输运通道。深水水下连接器主要有卡爪式连接器(Collet connector)和卡箍式连接器(Clamp connector)[6]。卡箍式连接器(如图1)在水平连接中的应用较多,连接管径50~1 200 mm(2~48英寸)[7]。卡爪式连接器(如图2)是深水中应用最多的连接器,尤其是垂直连接和超深水连接,压力等级可达104 MPa,连接管径100~1 600 mm(4~64英寸)[8],应用水深纪录已超过1 600 m。
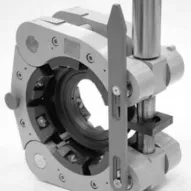
图1 卡箍式连接器

图2 卡爪式连接器
ROV(Remotely Operated Vehicle)是1种自泳式水下潜器,可用来执行阀门操作和液压操作等作业。ROV也可携带工具包,执行诸如柔性管和脐带缆的牵引和连接、水下部件更换等作业[9]。根据作业能力的大小,ROV可分为4个级别[10]:1级ROV是纯观察级,2级ROV是轻工作级,3级ROV是工作级,4级ROV是原型或改进型。深水水下连接作业需要工作级ROV。工作级ROV的前端通常装有2个机械手,分工合作:①右舷机械手为作业型机械手,作业精度高,5~7个自由度;②左舷机械手主要作为定位型机械手,较为简单,但臂力强大,能可靠实施ROV悬浮作业的定位功能,3~5个自由度。ROV通过机械手可以操作各种工具,完成引导、牵引、拧转、卡紧、插拔、检查等操作。
2 水下连接器用ROV作业分析
在进行ROV接口设计时,首先要明确在水下连接器服役期间,对其进行安装、维护和维修,需要ROV执行的水下作业内容以及所需的作业工具。
2.1 水下安装
安装水下连接器时ROV需要执行的操作有引导、卸扣,操作ROV面板完成连接,进行密封测试。需要的作业工具有连接器安装工具(Running Tool)和液压飞头。其中液压飞头可由ROV手持,连接器安装工具通过吊机和索具进行吊放。卡爪式连接器的安装工具如图3。

图3 卡爪式连接器安装工具
在安装过程中,ROV主要是在连接器安装工具的操作面板正前方这一侧活动。为了保证ROV可对安装过程进行全方位的观察和辅助,在连接器的两侧均应给ROV留出足够的操作空间。
2.2 水下维护和维修
由于深水作业日费率昂贵,连接器的维护、维修作业通常在水下进行,避免将连接器、跨接管以及水下生产设施回收到水上,以节省海上作业时间。在水下连接器服役期间,最常见的维护和维修作业包括:更换连接器密封圈、清洗连接器接头。相应的操作工具构成了当前国际上连接器产品最常见的应急维修工具组合。
2.2.1 卡爪式连接器水下密封更换
水下密封更换,需先拆除旧密封然后安装新密封。Oil States公司对此分别设计了密封拆除工具和密封安装工具,进行密封更换[11-14]。为进一步缩短作业时间,目前国际上较为先进的做法是将拆卸旧密封和安装新密封的功能集成在一个密封更换工具上,通过一次作业完成两个动作。
需要的作业工具:连接器安装工具、密封更换工具(如图4)和液压飞头。密封更换工具和液压飞头可由ROV直接手持,连接器安装工具通过吊机和索具进行吊放。

图4 密封更换工具
2.2.2 卡爪式连接器水下接头清洗
接头清洗工具用于对连接器接头密封表面的污垢杂质进行清刷,保证密封表面清洁光滑,保障密封的可靠性。需要的作业工具:连接器安装工具和接头清洗工具。接头清洗工具可由ROV直接手持,连接器安装工具通过吊机和索具进行吊放。接头清洗工具如图5。

图5 接头清洗工具
2.2.3 连接器回收
连接器的回收过程是连接器安装过程的逆向操作。需要的作业工具:连接器安装工具和液压飞头。
2.3 水下检查
2.3.1 视觉检查
在水下连接器服役期间,ROV利用自带的摄像头、照相机,对连接器的外观、完整性、海生物附着情况等进行检查,不需要其他专用工具。
2.3.2 牺牲阳极电位检查
对连接器、跨接管等上面的牺牲阳极电位进行测量,检查阳极损耗情况。需要的作业工具是牺牲阳极电位测量工具,可由ROV直接手持。
综上,在水下连接器服役期间,对连接器进行安装、维护和维修,需要ROV执行的水下作业内容和所需的作业工具如表1所示。

表1 卡爪式连接器水下安装、维护、维修作业
3 水下连接器ROV作业接口设计要求
水下连接器ROV作业接口的设计包括:确定作业时ROV的固定方式、ROV接口位置布置、ROV操作空间要求以及确定ROV接口形式。
3.1 ROV固定方式
常用的ROV固定方式有4种(如表2),其中,ROV抓把是最常用的固定方式。卡爪式水下连接器的ROV操作面板上应配置抓把,并按照ISO13628-8第12.2.4.3节的要求进行设计。抓把应能承受大小为2.2 k N、从任意方向施加的冲击作用力和握紧力。
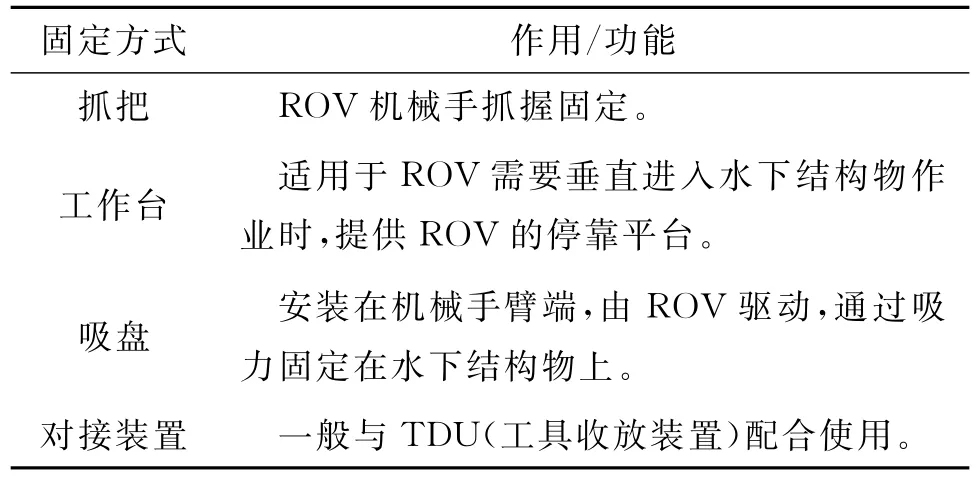
表2 ROV固定方式
3.2 ROV接口布置要求
ROV接口在水下结构物上的布置有3类(如表3)。应尽量将ROV接口布置在结构物外部,或者结构物内侧但距外表面<0.5 m范围内。ROV接口离海床的高度应在1.5 m以上。卡爪式水下连接器ROV操作接口集中在ROV操作面板上,一般位于水下结构物外部,可由ROV机械手直接抓到,便于ROV操作。
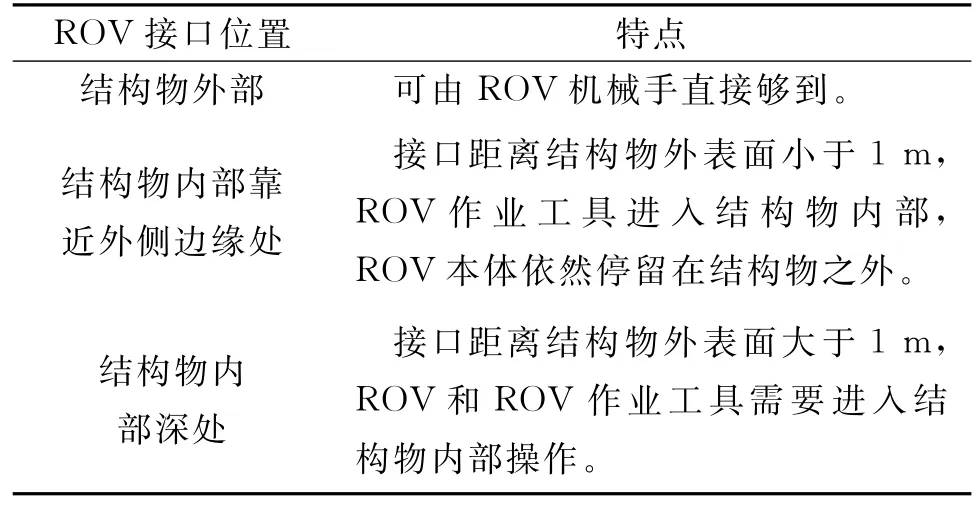
表3 ROV接口位置
3.3 ROV操作空间要求
当ROV需要进入到水下结构物内部作业时,在其周围应留出足够的进出空间(如图6)。
1) 通道宽度
①最小宽度由所选择的最大的ROV的宽度或ROV回转半径确定。
②ROV侧边到结构物表面间的余隙应不小于0.3 m。
③ROV艉部至少要留1 m的操作空间。
2) 通道高度
ROV的顶部和底部到结构物的距离应不小于0.5 m(防止脐带缠绕)。
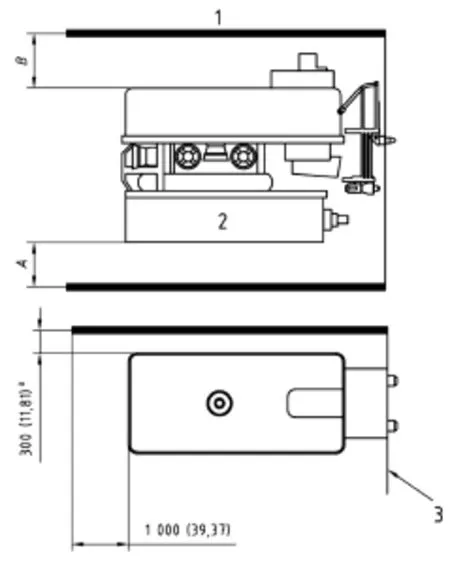
图6 ROV进入通道要求(图中A和B不小于0.5 m)
3) 垂直通道(如表4)
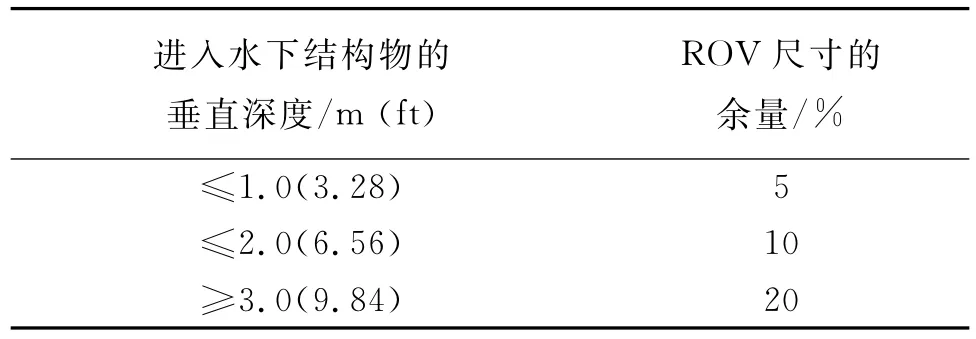
表4 ROV垂直通道要求
如3.2节所述,卡爪式水下连接器的ROV操作接口通常布置在结构物外部,ROV操作时不需进入水下结构物内部。
3.4 ROV接口形式
ROV接口有多种形式,在水下连接器安装、维护、维修作业中,用得最多的主要有3种:ROV操作手柄、阀门操作接口以及液压飞头插拔接口。
1) ROV操作手柄 有T形、O形或鱼尾形,由ROV机械手直接操作,可执行直线或旋转动作。如图5所示的接头清洗工具,采用T形操作手柄,可由ROV机械手携带并驱动旋转。
2) 阀门操作接口 如表5。
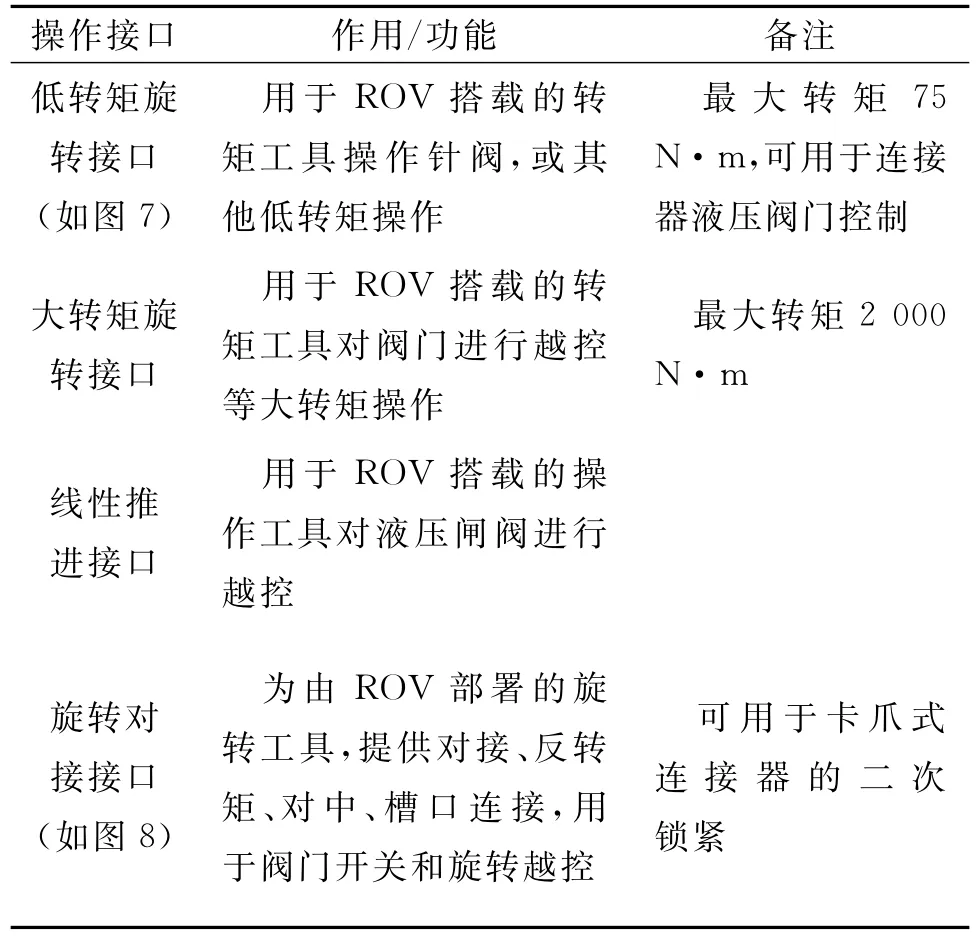
表5 阀门操作接口

图7 低转矩旋转接口

图8 旋转对接接口
3) 液压飞头插拔接口 液压飞头插拔接口与液压飞头配合,通过ROV向水下设备提供临时动力,在水下连接作业的过程中使用频繁。
3.5 卡爪式水下连接器ROV操作面板设计要求
卡爪式水下连接器的ROV操作接口集中在1块ROV面板。面板应该包括以下部件:ROV抓把、隔离阀、液压飞头接口、假堵头以及标识等。面板最少应具备如下操作和测试功能:
1) 将连接器安装工具与连接器上接头锁定/解锁。
2) 伸出/收回软着陆系统。
3) 将连接器上接头与下接头锁定/解锁。
4) 测试金属密封圈。
所有液压功能都应允许隔断(通过隔离阀),以便ROV可以移走液压飞头进行远程检查。所有的ROV接口应按照ISO 13628-8以及ROV工具规格书进行设计和制造。ROV面板和支撑结构应该可以抵抗所有的由ROV操作引起的力的作用。
4 结论
1) 水下连接器的深水安装、维护和维修作业,需要依赖于ROV进行,这就要求其作业程序必须具备高度自动化的特征,作业步骤要简便,需要ROV完成的动作要简单。为便于ROV作业,所有的连接器及其操作工具应采用ROV友好设计。
2) 尽量采用标准接口形式。这样可以简化操作工具设计,增强其通用性和互换性,同时降低对ROV操作的要求。
3) ROV操作接口的设计,除需满足连接器操作的功能性要求以外,还要满足ROV操作空间的要求。
4) 为便于ROV机械手进行拾取、夹持和携带,操作工具非关键部件的材料可采用铝合金、树脂等轻型材料,以减轻其质量。
5) ROV操作接口设计的合理性,需要在后期的FAT(出厂测试)和SIT(系统集成测试)等一系列测试中进行验证。
[1] 李志刚,周美珍,王立权,等.可回收式卡爪连接器的安装工具:中国,CN102658470A[P].2012-09-12.
[2] 付剑波,李志刚,姜瑛,等.水下连接器性能鉴定试验技术研究[J].石油矿场机械,2014,43(6):31-37.
[3] 洪毅,郭宏,李博,等.水下垂直套筒式连接器:中国,CN103292092A[P].2013-09-11.
[4] 赵三军,段梦兰,刘亚磊,等.1 500 m水深水平连接器压力帽结构及有限元分析[J].石油矿场械,2014,43(4):37-40.
[5] 王进全,李爱利,王定亚,等.一种海洋水下液压连接器:中国,CN201265369[P].2009-07-01.
[6] Skaar J C,Johnny Jurena,Fredrik Witting.Technical and Commercial Influences of Jumper Connectors with Emphasis on Decision Methodology[C]//Proceedings of the 18th Deep Offshore Technology International(DOT)Conference&Exhibition.Houston,Texas,USA,28-30 November,2006.
[7] Aker Solutions,Subsea Tie-in,Tools and Connection Systems Catalogue[EB/OL].[2014-04-29].http://akersolutions.com/en/Global-menu/Products-and-Services/Subsea-technologies-and-services/Subsea-productionsystems-and-technologies/Tie-in-connections-and-tooling/.
[8] FMC Technologies,Subsea Tie-in Systems Catalogue[EB/OL].[2014-04-29].http://www.fmctechnologies.com/subsea.
[9] ISO 13628-8—2002,Petroleum and natural gas industries-Design and operation of subsea production systems-Part 8:Remotely Operated Vehicle(ROV)Interfaces on Subsea Production Systems[S].
[10] DNV-RP-A203—2001,Qualification Procedures For New Technology[S].
[11] Q/HS GC011—2009,海洋石油工程股份有限公司企业标准:ROV作业规程(试行版)[S].
[12] Oil States,Collet Connector Systems[EB/OL].[2014-4-29].http://www.oilstates.com/fw/main/Collet-Connector-Systems-631.html.
[13] 周游,段梦兰,郭宏,等.深水水平套筒式连接器定位安装技术[J].石油矿场机械,2013,42(9):18-22.
[14] 付剑波,曹为.深水水下回接系统的选择[J].中国造船,2010,51(增刊2):202-206.
Research of ROV Intervention Interface Technologies for Subsea Collet Connector
LI Zhi-gang,FU Jian-bo,JIANG Ying,ZHANG Fei,WANG Yu-chen
(Offshore Oil Engineering Co.,Ltd.,Tianjin 300456,China)
Because of the water depth in deep water beyond the safe operating range for divers,installation,maintenance and repair of subsea tie-in connector should be done by ROVs using relevant ROV tooling.Hence,ROV intervention interfaces on connectors and ROV tooling should be correctly designed.Taking collect connector which is the most widely used connector type in deep water as an example,it is analyzed in this paper that demanded ROV intervention tasks and tooling.Also it is summarized that the stabilization methods for ROVs,arrangement of ROV interfaces on subsea equipment,space requirements for ROV operation,and the types of ROV interfaces.Based on above,considering the features of collet connector,recommendations are given for its ROV interfaces design in the paper.
subsea collet connector;ROV intervention;intervention interface;ROV panel
TE952
A
10.3969/j.issn.1001-3482.2014.12.009
1001-3482(2014)12-0035-05
2014-06-30
工信部海洋工程装备科研项目“水下连接系统及关键设备研制”
李志刚(1965-),男,河北衡水人,教授级高工,硕士,主要从事海洋工程技术研究。
