基于典型危险工况的危险评估方法研究
2014-06-01冯钦
文/冯钦
【机动车专栏】
基于典型危险工况的危险评估方法研究
文/冯钦
通过对6种典型的危险工况进行数据分析,了解驾驶员对于危险工况的反应时间,以及紧急制动起始点,并利用这些典型危险工况数据,建立了一种新的基于TTC1-h的危险评估模型,用于碰撞回避系统的控制策略开发。
典型危险工况 主动安全 控制策略
伴随着汽车保有量的增加,汽车发生碰撞事故的次数越来越频繁,严峻的交通安全问题使得人们对汽车安全性的要求越来越高。尽管很多被动安全措施可以减少事故发生后的人员伤亡,减轻事故的伤害程度,但并不能降低道路交通事故发生率,被动安全已经不能很好地满足现代交通安全的需求,主动安全技术将成为下一代汽车安全技术的主角。
一、危险评估
汽车安全技术的研究重心逐渐由被动安全技术向主动安全技术转移。由于自动紧急制动系统()具有很大的潜力来减少交通事故,因此得到了越来越多的重视,已经成为主动安全研究的一个重要方向。利用现代传感器技术(相机、雷达等传感器),实时对车辆的周围环境和车辆行驶状态进行探测,并估计当前环境的危险程度,当检测到有潜在碰撞危险时,系统向驾驶员发出警告以提醒驾驶员采取措施回避危险,并在驾驶员没有及时对警告信号做出正确的反应且碰撞危险变得十分紧急时,系统提供制动力,通过自动制动等主动介入方式来避免事故发生或减轻碰撞事故的严重程度。一个好的紧急制动系统,就要考虑两方面的平衡:制动效能和用户接受度。也就是说,的核心问题就是需要确定合适的介入时刻。一般来说,以碰撞时间()为例,
越大时采取制动,制动效能会越好,越不容易发生事故。但是,此时的用户满意度就非常差了,用户希望的是越符合他们的驾驶习惯越好,需要的是小一点采取制动措施。如何使这两者达到平衡,既保证制动效能,又满足用户的接受度,这就要求我们对真实的道路工况进行数据分析处理。本文从真实道路数据出发,选取6种典型的危险工况用于驾驶员驾驶行为的分析。然后,根据驾驶员行为数据建立基于-1-h的危险评估算法。
二、真实道路交通事故与危险工况数据采集
由于出租车具有运行时间长,运行道路覆盖广的特点,更有利于得到本研究关心的数据,故在出租车上装上车辆行驶记录仪(VDR)进行危险工况数据采集。VDR固定在车辆前挡风玻璃后视镜处,内含加速度传感器及图像处理元件。仪器摄像头正对驾驶员视野前方,VDR触发值设定为横向或纵向加速度大于等于3.92 m/s2,当车辆运行过程中达到触发条件后,VDR会自动记录触发点前15 s和后5 s的车辆前方视频、车辆速度和加速度信息。
在对307例危险工况进行数据分析过程中,本文是根据车辆的速度曲线提取危险工况的关键加速度段,研究驾驶员在危险工况下的制动行为特征。图1将危险工况的关键加速度段形象地表示出来,同时又点出了关键加速度段的6个重要点,尤其是危险出现点、紧急制动起始点、紧急制动终止点,这3个点在下文的关于驾驶员驾驶行为特性的分析中起到很重要的作用。

图1 危险工况关键加速度示意图
三、数据分析
VDR采集到了约4 000例触发工况,在进行数据筛选后,总共得到8例事故和1 200例危险工况。将这1 200例危险工况进行主观评价,通过主观评价对危险工况分别按危险度等级进行标记,并将危险度较高的案例作为研究目标。主要分为4级:0级(危险预兆)、1级(轻微危险)、2级(一般危险)、3级(紧急危险)。本文将筛选出危险度为2级和3级的危险工况作为研究目标,共得到430例危险工况。
得到这430例危险工况后,参照美国高速公路安全管理局(NHTSA)标准提出的37类预碰撞场景分类方法对这些危险工况进行分类,将危险工况分类标记。根据采集的工况数据统计,得到危险工况排名前6位的工况共有307例,无(或有)预先车辆行为的自行车(摩托车)冲突、前车减速、车辆同向变道、无预先车辆行为的行人冲突、前车偏离车道,占所有危险工况总数的71.4%。本文采用这307例危险工况来分析驾驶员行为。
在采集的危险工况中,所有的工况均采用了制动措施来避免事故的发生。当然,也有很小比例的工况在采取制动措施的时候,同时采用了转向措施。本文只关注驾驶员的制动行为。

本文利用采集的危险工况数据来确定驾驶员反应时间,危险出现点为t1,紧急制动起始点为t2,驾驶员的制动反应时间τ=2-1。经统计,得到的驾驶员制动反应时间主要集中在1.0 s左右,故本文设定驾驶员反应时间为1.0 s。描述的是假设当前时刻该车与目标车相对速度不变的情况下,该车与目标车碰撞发生时的时间,即:TTC等于相对距离除以相对速度。
为了数据提取方便准确,在计算驾驶员急制动开始时的值时,本文只选用前车减速工况(数量第二多的危险类型),具有较强的代表性。除去难以进行视频图像处理的数据,最终得到的有效数据为75例。在这75例工况中,驾驶员紧急制动开始时的值与该车速度的关系如图2所示,所有的车辆在紧急制动开始时的值均小于5 s,绝大部分分布在0.8 s~2 s之间。

图2 紧急制动起始点的TTC-Vh关系图
四、建立危险评估算法
根据之前的相关研究,驾驶员的制动行为与的倒数TTC(-1)密切相关,本文中选用TTC-1来表征危险。TTC-1描述的是前车大小增加率的时间变化,或车间距离R对数的时间变化,表征了视角增加的梯度(如图3所示)。


图3 TTC-1的说明
本文采取的危险工况,主要是城市道路工况,行车速度不高。从采集的工况数据中可以得知,危险工况中本车的速度主要在50 km/h以内,速度在50 km/h以上的数据量非常少,考虑到数据处理的可靠性,本文只选用速度在50 km/h以下的数据。对该部分数据进行线性拟合,并且求出90%的预测区间,最终结果如图4所示。其中50百分位线为线性拟合得出,50百分位函数表达式为公式(2):

50百分位线表示约有50%的驾驶员在达到该线的值时已经采取了制动措施。从图4中可以看出,驾驶员紧急制动开始时的TTC-1值并不是一个定值,而是与自车速度成一定关系。
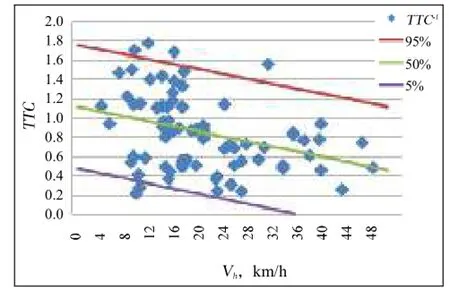
图4 驾驶员紧急制动起始点的-及拟合曲线
5百分位线和95百分位线包围区域为驾驶员急制动开始时刻的TTC-1的90%预测区间,95百分位线可表示为当TTC-1达到该曲线所表示的值时,约有95%的驾驶员已经采取了制动。95百分位线函数表达式为公式(3):

5百分位线可表示为只有约5%的驾驶员在TTC-1达到该曲线所表示的值时采取了紧急制动。5百分位函数表达式为公式(4):

根据图5中结果可以按照与速度的关系划分危险等级,共划分了4个区域:危险等级最高、危险等级较高、危险等级一般、安全。考虑到值很大(TTC-1很小)时,车辆处于安全运行状态。本文中采集的危险工况数据小于5 s,对于TTC大于等于5 s的数据,说明车辆正常运行。因此TTC将等于5 s(TTC-1等于0.2)设定为临界值。

图5 危险区域划分
当TTC-1值高于95百分位线时,认为危险等级最高(图5中区域IV);当TTC-1值高于50百分位线、低于95百分位线时,认为危险等级较高(图5中区域III);在TTC小于5 s,即TTC-1大于0.2时,当TTC-1值高于5百分位线时,即当TTC-1大于最大值(TTC-1)时,危险等级一般(图5中区域II);当TTC-1小于最大值(TTC-1)时,当前交通环境安全。
将危险等级区域划分之后,就要考虑建立危险评估算法。本文建立的危险评估算法采取两级报警、两级制动的方式。危险评估模型建立范围:Vh小于等于50 km/h,危险评估模型主要考虑4个临界值:全制动临界值、轻制动临界值、视觉+声音报警临界值、视觉报警临界值(见图6)。
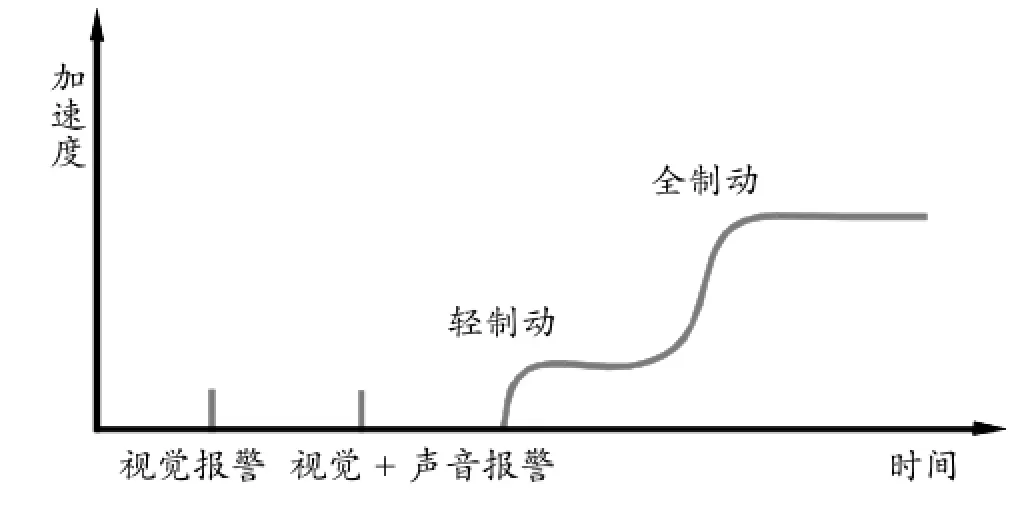
图6 危险评估模型4个临界值
全制动临界值:采用的是TTC-1-Vh(Vh小于等于50 km/h)中的95百分位线,此时采用100%的制动力。此种情况下采取制动措施,至少可避免95%的危险工况。
全制动TTC-1临界值表达式为公式(5):

制动区域为危险等级最高的区域,根据图5所划分的区域来分,区域IV为全制动区域。
轻制动临界值:采用的是TTC-1-Vh(小于等于50 km/h)中的50百分位线,此时采用40%的制动力。此种情况下采取制动措施,至少可避免50%的危险工况。
轻制动TTC-1临界值表达式为公式(6):

轻制动区域为危险等级较高的区域,根据图5所划分的区域来分,区域III为全制动区域。
视觉+声音报警临界值:采用的是TTC-1-Vh(Vh小于等于50 km/h)中的50百分位线+(驾驶员反应时间),=1.0 s,此时为公式(7):

一般来说,驾驶员对声音报警比较敏感,对于视觉报警反应的时间要长一些,视觉+声音报警作为第二次报警,针对的是大部分驾驶员,加入声音报警,表明车辆危险程度增加,提醒驾驶员立即采取避撞措施。
视觉报警临界值:采用的是-h(小于等于50 km/h)中5百分位+(驾驶员反应时间),RT=1.0 s,此时间可参照公式4,但是报警时间的TTC最大值为5 s,即TTC-1的最小值为0.2。此时

视觉报警作为第一次报警,仅采取了视觉报警,此时车辆开始进入危险状态,给驾驶员一个稍弱的警告,提醒驾驶员采取避撞措施。
视觉+声音报警区域与视觉报警区域均位于危险等级一般的区域,根据图5所划分的区域来分,均位于区域II。
将全制动、轻制动、视觉+声音报警、视觉报警合在一起,组成本文所需要的危险评估模型(如图7所示)。
图7TTC-1-h危险评估模型
五、结语
本文研究的危险评估算法基于真实道路交通典型危险工况,采用两级报警、两级制动来达到及时躲避障碍物、降低车辆危险程度的效果,采用渐进式预警(两级报警,由颜色预警到声音报警),可以让驾驶员有所准备,不会感到警报过于突然,同时采取渐进式制动(两级制动),在不同的危险阶段采用不同的制动力,制动力由小到大,这样能够及时地在车辆处于危险状态时进行有效控制,从而帮助司机避免城市交通常见的低速行驶时的追尾事故,大大减少维修车辆的时间与成本,降低人员伤亡率。通过试验仿真验证,得到本危险评估算法在50km/h以内时可以有效避免危险事故的发生。
Through data analysis of six typical kinds of hazardous working conditions,driver's reaction time towards dangerous working conditions as well as emergency braking starting point were obtained.The data of near-crash traffic situations are utilized to establish a new risk assessment1-based model,which is applicable to the control algorithm development for the collision avoidance systems.
Typical near-crash traffic situation,active safety,control algorithm
(作者单位:国家机动车产品质量监督检验中心(上海))