激光扫描技术在轨道施工质量自检中的应用研究
2014-05-30白杨军段晓峰
白杨军,段晓峰
(1.中铁一局集团有限公司,西安 710054;2.兰州交通大学土木工程学院,兰州 730070)
1 概述
轨道平顺性控制是轨道管理的核心问题和技术关键问题,直接影响铁路运行安全、高速及舒适度,因此,需从设计、施工、维修管理等方面进行严格控制和规范管理。由于轨道不平顺具有“记忆”特征,初始不平顺好的轨道,维修周期长,养护维修工作量小,能长期保持良好的平顺状态;初始不平顺差的轨道,不仅维修周期缩短,即使增加维修作业次数也难以改变轨道初期先天不良水平,所以初始不平顺是运营后各种轨道不平顺发生、发展、恶化的根源,这就需要在建设过程中严格控制轨道初始不平顺。
铁路轨道工程施工自检是轨道工程施工质量验收前的必须环节,作为主要检查内容的轨道几何形位检查是获取轨道不平顺指标(主要有轨距、水平、高低、轨向、复合不平顺及连续不平顺等)的技术途径。现有技术条件下,依照检查方式的不同分为手工静态检查和检查车动态检查。轨道几何尺寸静态检查,主要利用道尺、弦绳及板尺等检查工具沿线路按照相关标准逐点进行,线路几何尺寸检查的主要项目有轨距、水平、轨向、高低及轨底坡。轨道几何尺寸动态检查主要设备是轨检车,如我国的GJ-5、日本的East-i,德国的OMWE,奥地利Plasser公司的EM250等,检测项目主要包括轨距、水平、三角坑、高低、轨向、车体垂向加速度、车体横向加速度、轨距变化率、曲率变化率、横向加速度变化率等。这种传统的轨道几何形位检测方式一静一动,得到的数据一粗一细,基本可满足现场需要。但这种数据检测方式人多、效率低,且静态数据多为抽检,数据离散,与真实线路形位有较大偏差,轨检车动态检测结果现场施工指导性不足。随着提速铁路高平顺性和高舒适性要求的提出,轨道初始不平顺检测作业项目增多且标准日趋严格,如何改进轨道施工自检功效,进而改善轨道初始不平顺状态,提升轨道施工质量是目前施工单位适应铁路建设新形势下要主动解决的一个难题。三维激光扫描技术是最新的测量技术,我们尝试以此为问题解决的切入点。
三维激光扫描技术又被称为实景复制技术,源于逆向工程,是从单点测量进化到面测量的革命性技术突破,具有采集效率高、数据连续、实时三维、非接触性等独特数据优势。按照载体的不同,三维激光扫描系统又可分为机载、车载、地面和手持型几类。三维激光扫描技术能够提供扫描物体表面的三维点云(point cloud)数据,因此可以用于获取高精度高分辨率的物体表面模型。在我国铁路建设领域,主要应用涉及测量工程领域和结构测量领域,目前已取得的研究成果包括:利用机载激光扫描技术获取三维点云信息建立数字地形模型,进行初测阶段带状等高线地形图的应用研究和定测阶段横纵断面测量的应用研究[1];隧道断面测量及变形监测应用[2,3];在既有铁路勘测中,已就地面激光扫描仪的数据采集方法展开初步研究[4],正试图扩展激光扫描技术在结构测量领域的应用[5],相关的数据处理方法基本处于技术探索阶段。
本研究利用三维激光扫描系统对铺砟整道后的新建铁路轨道施工质量进行一般项目自检,结合线路点云数据特点,通过实时连续点云数据采集、数据处理、数据分析及利用,以期实现高精度、高效率、智能化铁路线路轨道测量,为该技术在铁路建设领域广泛推广应用进行技术积累。
2 检测试验
2.1 检测依托工程概况
中铁一局集团承建的甘泉铁路(甘其毛都至万水泉南站)工程,位于内蒙古自治区西北部的包头市、巴彦淖尔市境内,起讫里程DK22+500~DK359+200,线路全长367 km,为国家Ⅰ级单线电气化铁路,货运专线,设计时速 120 km,最小曲线半径:一般地段1 200 m,困难地段800 m;限制坡度:上行6‰,下行13‰;轨道结构:重型有砟。
结合前期研究成果[4],选用美国 BASIS公司的Surphaser25HSX地面三维激光扫描仪对甘泉铁路DK126+050~K127+500段线路进行检测。测区平面示意见图1。
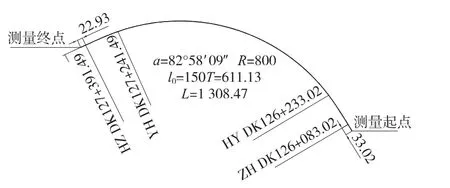
图1 检测试验段平面示意
2.2 检测内容及标准
针对铺砟整道后的轨道工程施工质量进行自检,包括:轨道静态平顺度、轨面高程、轨道中线偏差。对应检测标准见表1。

表1 检测内容及标准[6]
依据《铁路轨道工程施工质量验收标准》(TB10413—2003/J284—2004)规定,采用传统检测技术(观察检查、尺量)要求施工单位正线每2 km各项均抽检10个测点,但每单位工程至少抽检1个曲线10个测点。本次试验采用地面激光扫描仪,通过采集连续的点云信息,在内业根据指标特性,利用提取的线路点云内/外轨三维数据,10 m或20 m弦长取点测量相关指标。
2.3 检测方案
综合考虑测量精度与效率的匹配问题,检测试验中采用了线路中线“一”字形施测(沿线路中心线移站)、“之”字形施测(路基双侧交替移站)、低地面仪器“一”字形施测(无脚架线路中心移站)3种方案,具体测站布置如图2所示。

图2 测站布设示意(单位:m)
在外业数据采集中,将三维激光扫描仪扫描密度定为20×20,则点位间隔递增率为0.8 mm/m,可以满足数据采集密度需要。同时,在测区(纵向为同一坡段)首、中、尾处布置了3对控制点,用全站仪和水准仪进行了控制测量。激光扫描仪外业作业仅需2人,1人负责仪器,1人配合移动标靶即可。对应的控制测量按常规作业需配备6人。
依照现场扫描结果(图3~图5),3种施测方案其对应的优缺点见表2。
图3~图5显示了不同施测方案局部点云数据处理后的效果。

图4 采用“之”字形施测点云处理效果图

图5 采用低地面仪器“一”字形施测点云处理效果图

表2 施测方案优缺点比较
3 检测数据处理及分析
3.1 线路点云数据处理
对外业采集回来的散乱的点云信息需在内业结合专业软件的处理才能得以工程应用,具体包括线路点云数据预处理与线路点云数据提取。原始采集点云见图6。
3.1.1 线路点云数据预处理
因线路结构的长带状、松散性、材料异性等自身属性,使其预处理过程明显有别于普通逆向工程技术流程[7],线路点云数据预处理关键技术主要包括多视拼合、噪声去除、数据简化和网格化。
多视拼合是指用磁性觇标控制点法进行点云配准,将所有的点云数据转换到一个共同的参考坐标系统,以取得统一的相对坐标,并进一步结合控制网坐标,将点云回归绝对坐标。在具体操作过程中,同名点(即标靶)注册后,严格控制审核误差,若误差大于要求范围,需重新选点,拼接。
噪声去除用于减少在扫描过程中产生的一些噪声点数据,所谓的噪声点是指模型表面粗糙的、非均匀的外表点云,扫描过程中由于扫描仪器的轻微抖动等原因产生。减噪处理可以使数据平滑,降低模型的这些偏差点的偏差值,因此在操作过程中需结合线路不同设备特征,进行自由曲面和平滑级别的各自处理。
最后根据所要解决的工程实际对数据采集密度的要求,进行数据简化,删除冗余数据,进行封装(图7),构建多边形三角面片模型,根据需要可利用后处理软件的曲线处理技术,实现多边形网格的规则化,作为上游数据为CAD正向设计提供支持。

图6 原始采集点云

图7 封装后的点云
3.1.2 线路点云数据提取
点云数据提取即线路点云模型重构是激光扫描技术专业应用的关键技术,是指以已有的物理模型为上游数据,产生正向CAD设计特征模型的过程,包含离散测点的网格化、特征提取、表面分片和曲面生成等。在具体的应用中结合轨道施工质量自检指标的特点,以特征面(图8)的构建为关键进行了线路轨向及道床断面数据的提取。提取后的轨向数据同时包括内/外轨数据,最小点位间隔为1 m,并可据此进行实测线路中心线位的提取。将这些数据另存为DXF格式导入CAD便于静态几何形位等指标的具体量测与分析,如轨距的量测见图9。
3.2 线路点云数据分析
3.2.1 轨道中线
根据提取线路中心线位置,将其和设计线路中桩进行对比分析,三维比较标准偏差0.173 m,最大上偏差0.365 m,最大下偏差 0.500 m,在±0.145 m 以内的数据点个数占到55.26%,具体偏差分分布见图10。

图8 特征面构建

图9 CAD轨距测量(单位:m)

图10 检测试验三维偏差分布示意
3.2.2 轨面高程
对三维线路中心线纵向投影,高差分布见图11,轨面高程合格率98%。

图11 高差分布示意
3.2.3 轨道静态平顺度
根据提取的内/外轨三维线条,在AutoCAD中根据指标特性,10 m或20 m弦长取点测量,详见表3。
参照检验标准可知,轨距合格率16.2%;轨面高低合格率89.8%;轨向合格率:直线段50%,缓和曲线段30%,圆曲线段32%。
轨距超限原因主要有扣件松动;钢轨硬弯或焊接钢轨时没有对正;曲线地段轨道加强设备不足或超高设置不当。轨向方向不良大多数是由于钢轨存在硬弯、碎弯造成的,该检测试验段主要位于曲线,由于弯度大,容易出现接头支嘴,也是出现方向不良的一个原因。
这里曲线头尾的几何偏差很大,而这往往是列车曲线脱轨的重要原因,这种几何偏差实质上是一种轨道超高和曲率不匹配的严重复合不平顺,将使车辆产生剧烈摇晃,脱轨系数和减载率侧向力均显著增加。为了进一步辨识轨向不良带来的连锁反应,结合既有线点云整正方法研究[5],进行了改试验段的部分曲率变化率分析,如图12所示。

图12 实测5 m间距点曲率变化率
曲率变化率分析数据显示在 DK126+823.57,DK126+838.57,轨向严重不良,与现场圆曲线正是最大最小值差所在位置检测结果吻合。
基于上述轨道检测结果进行了线路调整,线路不平顺得以改观,Ⅱ级超限点基本消除,极大地改善了线路初始不平顺状态。
4 结语
本次检测试验研究以轨道施工自检为依托,采用激光扫描技术对铁路线路点云数据采集、处理、分析及利用进行了探索,获得了有益的技术积累,主要结论如下。

表3 检测记录mm
(1)明确线路勘测地面激光扫描技术作业模式。包括仪器选型、控制网布设、标靶布置、施测流程等具体要求。
(2)提出线路点云数据处理方法。结合线路专业技术特点,提出线路点云数据预处理方法和线路点云线、面、体设计特征的初步提取方法,基于此可一次性完成轨道中线、轨面高程、轨道静态平顺度等轨道设备尺寸检查,极大地降低了外业作业强度,提高了工作效率。
海量的线路点云信息对现场进行了实景复制,可根据不同用户需要进行三维设备线、面、体的查询和管理,丰富了数据管理手段。与此同时,由于铁路建设需要的复杂性,激光扫描技术在其专业应用推广中需进一步处理好精度、效率、智能化的匹配问题。
[1]韩改新.机载激光雷达(LIDAR)技术在铁路勘测设计中的应用探讨[J].铁道勘察,2008(3):1-3.
[2]夏国芳,王晏民.三维激光扫描技术在隧道横纵断面测量中的应用研究[J].北京建筑工程学院学报,2010(9):21-24.
[3]托雷.基于三维激光扫描数据的地铁隧道变形监测[D].北京:中国地质大学,2012.
[4]李建强.地面激光扫描技术在既有铁路勘测中的应用研究[J].铁道建筑,2012(4):128-131.
[5]段晓峰,韩峰,李建强.基于点云信息的既有线整正方法研究[J].铁道标准设计,2013(8):15-18.
[6]中华人民共和国铁道部.TB10413—2003 铁路轨道工程施工质量验收标准[S].北京:中国铁道出版社,2004.
[7]梁欣廉,张继贤,李海涛,闫平.激光雷达数据特点[J].遥感信息,2005(3):71-76.
[8]中华人民共和国铁道部.铁运[2006]146号 铁路线路修理规则[S].北京:中国铁道出版社,2006.
[9]铁道部运输局.部运基线路电[2008]227号 关于调整轨道动态管理标准的通知[Z].北京:中华人民共和国铁道部,2008.
[10]中铁一局集团有限公司,兰州交通大学.基于点云信息的铁路线路状态检测及评估技术研究报告[R].西安:中铁一局集团有限公司,兰州交通大学,2013.