50MN压平机新型升降平台运动学分析①
2014-05-28杨天云周存龙马国财陈少航
杨天云 周存龙 马国财 陈少航
(太原科技大学 山西太原030024)
1 前言
宽厚板压平机所用的升降平台是一种平面升降机构,传统的升降平台采用的是四连杆机构,设备本体笨重,且平台升降时容易发生倾斜,严重影响实际生产的正常进行,所以开发、研究一种承载能力强,平台起升后平稳性高,结构紧凑的新型升降平台迫在眉睫。
所依托的项目借鉴主要用于轻载的剪叉升降平台,结合重载升降平台的特点,开发了大型宽厚板压平机用的剪叉式新型升降平台,下面是对该结构所做的运动分析和强度分析。
2 剪叉式新型升降机构
本升降平台的设计要求承载为85000kg,上平台升降高度需达到200mm,各机构需运动灵活,不得有卡死现象。
该新型升降平台结构简图和三维实体模型如图1、图2所示。它包括底板、外叉臂、内叉臂、铰链轴、滚轮、液压缸、上台板,其采用液压系统控制2个液压缸同步运动,同时伸缩,相同的推力,活塞杆1推动推车连杆2的4个滚轮,滚轮带动与之销连接的外叉臂,外叉臂另一端绕着固定铰链转动,随着滚轮在轨道内运动(前进或后退),带动内叉臂一端安装的滚轮在轨道内运动(前进或后退),另一端绕着固定铰链转动,外叉臂与内叉臂之间采用铰链轴连接,从而使上台板4上下运动。三维造型见图2所示。
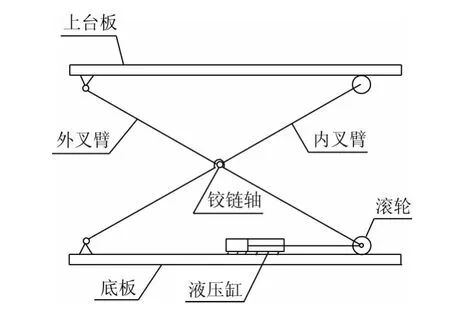
图1 升降平台结构简图
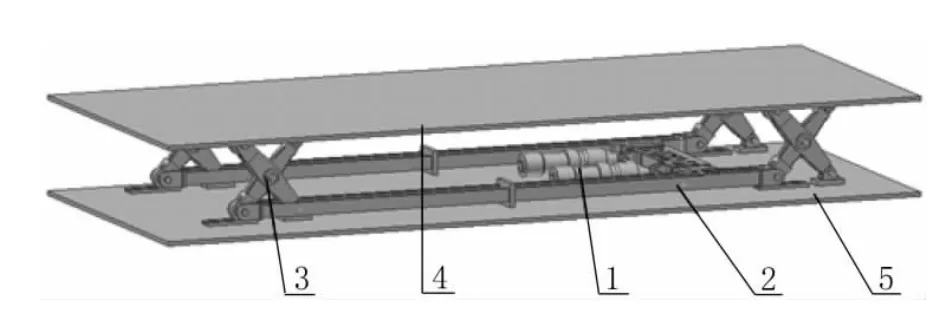
图2 升降平台三维实体模型
一般情况下,机构自由度的计算是新机构结构分析的重要内容,下面将根据自由度计算公式来对该升降平台进行计算[1]。

式中 n—活动构件的数目;
pl—低副的数目;
ph—高副的数目。
使用该公式的前提是,先判断出一些特殊情况:复合铰链,局部自由度和虚约束。对于局部自由度,处理方法是将两个构件并成一个整体;而复合铰链处的转动副数目等于相连的构件数目减1;虚约束处理方法是去掉重复的部分,只保留其中一个。根据以上方法,得出活动构件为7,低副为9,高副为2,带入(1)式得
F=3n-2pl-ph=3×7-2×9-2=1
由于该机构只有一个原动件,原动件的数目=自由度的数目,所以该机构有确定的运动。
3 剪叉式新型升降平台的运动仿真
3.1 新型升降平台模型的建立
该升降平台三维模型利用三维软件Inventor中进行建模,以Parasolid格式导入到ADAMS中进行仿真。本升降平台结构复杂,为了方便仿真分析,对分析结果影响不大的零部件略去,以得到简化模型。
3.2新型升降平台运动仿真分析
3.2.1 新型升降平台技术难点及解决方法
开发新型升降平台技术难点主要有两个方面,①液压缸型号的确定;②升降平台的举升行程及上台的运动轨迹。为了解决上述难点,将三维模型导入到ADAMS中,对其进行运动仿真。得出液压缸的推力曲线轨迹和上台板质心的位置曲线轨迹。
3.2.2 新型升降平台的加载条件
新型升降平台在配合其他机器工作时,先是负载上升,然后空载下降。因此研究液压缸的最大推力时,只需要研究升降平台负载上升的过程。对此先定义构件材料,在转动副上添加旋转副,液压缸体与活塞之间添加滑移副,并将下台板与大地固定;由于全部用低副来进行约束容易形成一个封闭的回路,这样就造成系统过约束,在过约束的情况下,系统在求解时会自动解除一些约束,在被解除约束的自由度上就不会计算构件之间的相互作用力,这种情况下可以使用基本副来代替低副,所以在对该模型进行约束时,使用了点点副和点线副来代替旋转副。上、下滚轮是在导轨上滚动的,需要在上、下滚轮和轨道之间添加8个接触。因为滚轮与导轨的滚动摩擦对本文分析结果影响不大,故不必涉及摩擦因数。
在进行液压缸推力仿真分析前,需要施加载荷和驱动,将此载荷简化为一个集中力添加在上平台的几何中心处。根据设计要求,本模型中平台所承受的最大载荷为850kN,液压缸最大行程约为300mm,设机构完成抬举时间为10s。利用STEP函数为滑移副添加滑移驱动,其驱动函数为:STEP(time,0,0,10,-300)[3]。仿真后得到2个液压缸推力之和的变化曲线,如图3所示、上台板的位移曲线分别如图4、5、6所示。
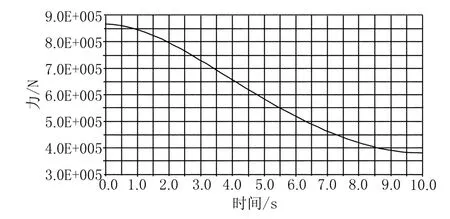
图3 2个液压缸推力之和的变化曲线
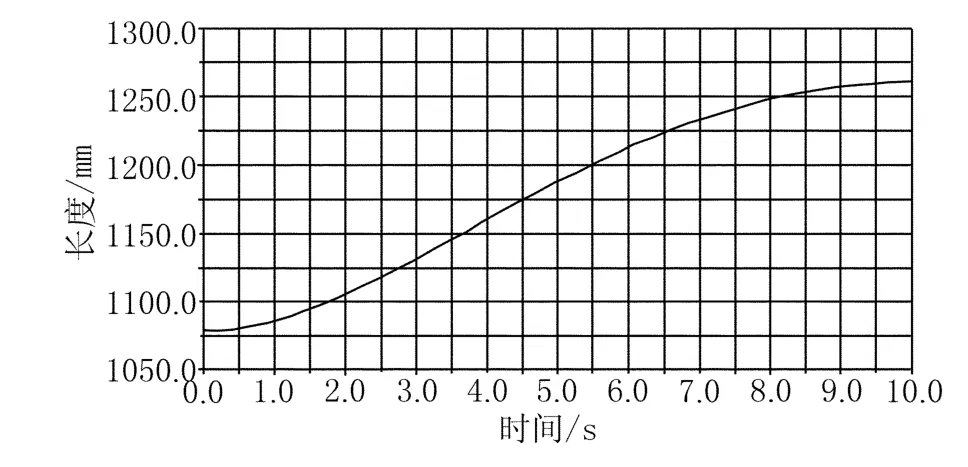
图4 上台板Y方向位置变化曲线
图5 上台板X方向位置变化曲线
图6 上台板Z方向位置变化曲线
3.2.3 运动结果分析
由图3可知,两个液压缸在启动的初始状态时,因为外叉臂与内叉臂支架的夹角最大,在外载荷不变的情况下,随着滚轮的前进,剪杆之间的夹角逐渐变小,随之施加在滚轮X方向的力也随着变小,所以最大值是860kN,故每个液压缸的最大推力为420kN;图4显示上台板可上升达到的最大高度约为1.2m(以地面为基准),上台板从1.07m开始运动到1.270m结束,抬升行程最大为0.2m。从图5、6可知上台板在运动过程中,只有Y方向有位移,X与Z方向没有位移,所以,可以确定上台板的运动方式为上下运动。通过上述运动仿真基本上确定了上台板的运动轨迹和液压缸的型号。
4 结论
1)与传统升降平台相比,该设备动作平稳可靠,结构紧凑,使用寿命长。通过对新型升降机构自由度的计算,可以得出该设计方案是合理的。
2)通过对其进行运动仿真确定了新型升降平台的运动轨迹及举升行程。最后得出液压缸的最大推力,为液压缸型号的选定提供了一定的依据。
[1]哈尔滨工业大学机械原理教研室编.机械原理.北京:高等教育出版社,2000:11-16.
[2]乞英焕,董为民,孙健,武建华.对称驱动剪叉液压升降平台的动力学仿真 新技术新工艺[J],2013(5):41.
[3]孙光旭,袁端才.液压剪叉式升降台的动力学仿真 系统仿真学报[J],2010(11):2651.
[4]李增刚著.ADAMS入门详解与实例.北京:国防工业出版社,2006:65-81.
