板振动的无需次级通道建模的分散式前馈控制方法研究
2014-05-25孙红灵李晓东
曹 寅,孙红灵,李晓东
(中国科学院噪声与振动重点实验室(声学研究所),北京 100190)
板振动的无需次级通道建模的分散式前馈控制方法研究
曹 寅,孙红灵,李晓东
(中国科学院噪声与振动重点实验室(声学研究所),北京 100190)
针对板的振动,提出一种无需次级通道建模的分散式前馈控制方法。该前馈控制方法不需要结构的物理信息,并且能够控制板在非共振频率处的线谱振动。采用压电片和加速度计分别作为执行和传感元件,建立了简支板振动主动控制的理论模型和实验系统。提出了分散式前馈控制策略,并分析了无需次级通道建模的分散式前馈控制算法的稳定性。提出一种内模滤波器将加速度信号转变为速度信号,并补偿抗混叠滤波器和平滑滤波器的频率响应,使执行器和传感器保持同位配置。通过仿真和实验验证了该算法的有效性。
分散式前馈控制;无需次级通道建模;主动振动控制
弹性结构的分散式速度反馈控制近年来受到了很多关注[1-3]。该方法实际上是一种主动阻尼控制方法,它需要执行器和传感器在物理位置上是同位配置的。在弹性结构表面布放多个同位配置的控制单元,当合理设置控制单元的反馈增益后,即可有效控制结构的随机扰动。其主要优点在于控制复杂度低,计算量小,易于实施,鲁棒性较强,控制效果和集中式控制效果类似,并且不需要任何结构的物理信息[4-9]。然而由于稳定性的原因,分散式速度反馈控制的反馈增益不能调节过大,限制了控制效果。如果在非共振频段上有周期扰动,分散式速度反馈控制将失去控制效果。
一般而言,弹性结构周期性扰动的主动控制是采用前馈控制的方法[10-15],但这种控制方法实施相对复杂,它需要预先掌握结构振动的模态信息并对执行器和传感器的布放位置进行优化[16]。鉴于分散式速度反馈控制利用执行器和传感器同位配置的特点降低了控制算法的复杂度,Elliott和Baudry等[4,6,17]研究了对于执行器和传感器同位配置时,分散式多通道前馈控制系统的稳定性和通道之间的耦合性。结果表明,分散式前馈控制策略是稳定的,并且可以控制结构在非共振频率处的周期性扰动。除此之外,这种控制方法仅仅需要局部的同位配置的执行器到传感器之间的物理通道信息。Zhou和Wu等[18-19]基于传递函数矩阵严格正实(Strictly Positive Real)的特点研究了单通道的无需次级通道辨识的前馈控制算法,根据次级通道严格正实的特点可以省去次级通道的辨识从而增强算法的稳定性以及简便性。
本文针对板的振动,提出了一种多通道的无需次级通道建模的分散式前馈控制策略。当执行器和传感器同位配置时,其传递函数矩阵是严格正实的,该控制策略基于这个特点对板的线谱扰动进行控制可无需次级通道建模。同时,本文还针对数字控制系统设计了一种内模滤波器,通过设计的内模滤波器可以使得执行器和传感器通过数字系统时依然保持同位配置的特点。简支板振动的仿真和实验结果表明,无需次级通道建模的分散式前馈控制是一种有效的控制方法。
1 简支板结构的物理模型
考虑一块四端简支的铝板,采用多个压电片和速度传感器组成的反馈控制单元组对板的振动进行分散式反馈控制。将板分成一系列小的矩形单元,矩形单元的尺寸为lxe=Lx/(4M)和lye=Ly/(4N),式中Lx和LY分别为板的长和宽,M和N是计算时考虑的板的最高阶模态的阶数。整个系统的结构如图1所示。
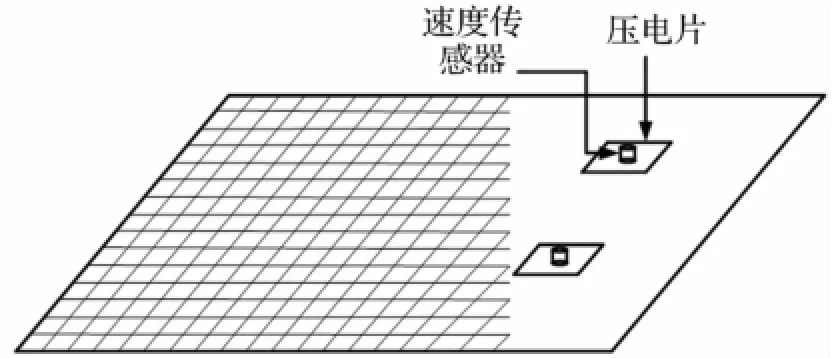
图1 板振动的分散式控制示意图Fig.1 Diagram of decentralized control of plate vibrations
压电片的激励可等效为作用在压电片边缘上、幅值相等的4条线力矩[1],其幅度为:
Γ=C0εpe(1)
其中:C0和εpe都是和压电片、板的属性以及压电片的输入电压有关的常数:

式中:Ep,Epe分别为板和压电片的杨氏模量;vp,vpe分别为板和压电片的泊松比;hp是板的厚度,ha是压电片的厚度;d31是压电应变常数。若记第i个压电片所在区域是x∈[x1i,x2i],y∈[y1i,y2i],第k个速度传感器所在的位置为(xk,yk)。压电片到速度传感器的传递函数可表示

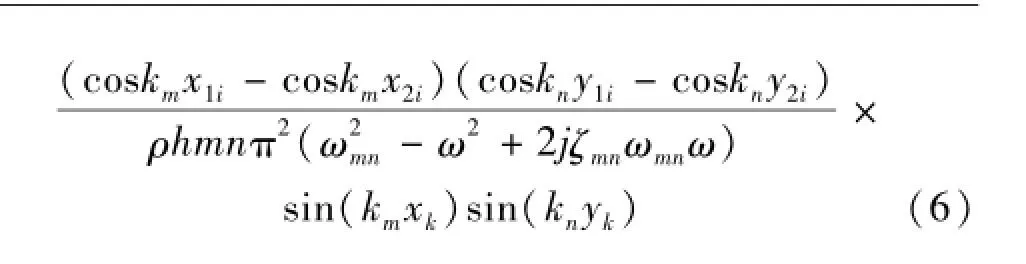
其中:km=mπ/Lx,kn=nπ/Ly;ρ,h分别是板的密度和厚度;ωmn是简支板的共振频率;ζmn为相应的模态阻尼比。
2 控制器的设计和分析
本节提出针对同位配置传感器的无需次级通道的前馈控制策略,并对其稳定性进行分析。分析过程中,假设使用的同位配置的换能器对是压电片执行器和速度传感器。有研究证明[4-5],在相对低频的范围内,这对换能器之间的传递函数矩阵的实部是正定的。
2.1 控制器的设计
对于分散式的控制策略,同位配置执行器与传感器之间的传递函数矩阵的实部Re[H(jω)]一定是正定的,这是因为由执行器提供给控制系统的总能量总是正的[4]。若假设互易性成立(对于结构的线性振动是一个合理的假设),因此HH+H=2Re[H(jω)]是正定的,由此可得H(jω)是严格正实的矩阵,该条件等价于Re[λi(H)]>0,这在第2.2节将会被证明是本文所提出算法的稳定性条件。
当系统达到稳态时,由N个速度传感器测得的误差信号向量y=[y1,y2,…,yN]T可以表述为:
y=d+Hu(7)
其中:u=[u1,u2,…,uN]T是输入给N个压电片执行器的控制信号向量,d=[d1,d2,…,dN]T是初始扰动信号向量。选取误差信号的能量总和加上带权重的执行器输出能量作为代价函数,即:
J=yHy+βuHu(8)
其中:上标H是厄密特转置,β是执行器输出能量的权重系数,它决定了执行器输出能量的惩罚程度,并且能增加前馈控制的稳定性[6]。

最小化代价函数(8)的最优输出向量u可以通过最陡下降法得到:u(k+1)=u(k)-μ▽uJ,其中μ是自适应算法的更新步长,uJ=y+2βu是梯度向量,由此,更新算法可以化简为:其中是辨识的次级通道矩阵。如果不考虑辨识误差,则=H是最陡下降算法=diag(Hii)是分散式算法=I是无需次级通道的分散式算法。有研究证明[4,17],当=diag(Hii)并且使用同位配置的换能器对时,算法是稳定的。
2.2 无需次级通道的分散式前馈算法的稳定性分析
如果算法(9)是稳定收敛的,当k→∞时,u(k+1)=u(k)。因此u(k)最终收敛到最优值:uopt=-(H+βI)-1d,将式(9)两边同时减去uopt,并作简化可得:
其中:v(k)=u(k)-u∞。上式稳定的充要条件是矩阵C=[I-2μ(β+H]是Schur稳定的[6]:所有矩阵C的特征值都在单位圆内,即这等价于经过简化可得出满足稳定性条件时,μ的取值范围为:

关于式(11)的必要条件是Re[λi(β+H)]>0。此时只需找到一个足够小的μ即可满足式(11)的收敛性条件。若β=0且^=I,即无次级通道的分散式前馈控制,此时上述收敛性条件为Re[λi(H)]>0,当同位配置的换能器对被使用时,这个条件在2.1节被证明是满足的。
2.3 无次级通道控制算法的实现
由前所述,当次级通道矩阵的特征值的实部是正的时,即Re[λi(H)]>0时,算法是稳定的。然而,当控制算法在数字系统上实现时,数字系统的模拟抗混叠滤波器和平滑滤波器将会破坏稳定性条件,即可能会使Re[λi(H)]<0。同时实际使用时常用加速度计作为传感器,因此需要将加速度信号转换成速度信号。为解决上述问题,本文提出了一种内模滤波器将加速度信号转变为速度信号并补偿抗混叠滤波器和平滑滤波器的频率响应。内模滤波器的频响可以表述为:
HIMF(jω)×Hanalog(jω)=Hintegrator(jω)(12)
其中:HIMF(jω)是内模滤波器的频率响应,Hanalog(jω)是抗混叠滤波器和平滑滤波器的频率响应,而Hintegrator(jω)=1/jω是理论积分器的频率响应。
内模滤波器的频响同样可以由最陡下降法获得:
e(k)=Hintegrator-Hanalog×HIMF(13)
HIMF(k+1)=HIMF(k)+μIMFHHanaloge(k)(14)
其中:μIMF是更新算法的步长,Hanalog可以用系统辨识的方法得到。对于一个数字处理系统(DSP系统)而言,Hanalog是固定的,获得HIMF的过程中不需要物理通道的信息,因此HIMF只需要计算一次。获得HIMF的算法框图如图2所示。
图2中解调部分的作用是提取出时域信号y(n)在ω=ω0的频率响应:先将时域信号频移-ω0,然后用一个低通滤波器提取出频移后信号的直流部分。这个过程可表述如下:

式中表示卷积,f(n)是一个低通滤波器,ω0是线谱扰动信号的数字频率。

图2 HIMF的辨识算法框图Fig.2 Block Diagram of identification algorithm for HIMF
调制部分的作用是将频率响应U转换到时域振荡信号u(n):先将频率响应U经过低通滤波器f(n),然后频移ω0恢复振荡,最后取信号的实部作为u(n)。上述过程可表述如下:

至此,就得到了HIMF,无需次级通道的控制算法(9)可按图3实现:
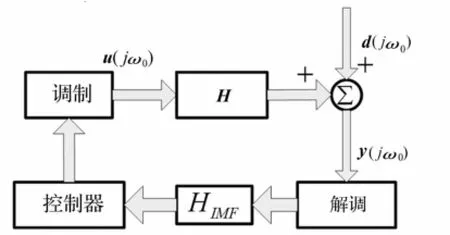
图3 控制算法示意图Fig.3 Block Diagram of control algorithm
3 仿真和实验研究
本文的实验系统是由一个500 mm×400 mm×2 mm的矩形铝板组成,如图4所示,板被放置在上下两层带凹槽的钢性框架之间,其边界条件可近似认为是简支的。在板下方有一个有机玻璃制作的空腔。初始扰动由空腔内部的扬声器产生。本实验使用了3对同位配置的压电片执行器和加速度传感器,如图5所示。数字控制系统是基于TI TMS320C6713 DSP系统,采样频率是2 kHz,平滑滤波器和抗混叠滤波器都是由4个2阶巴特沃斯滤波器构成,截至频率是500 Hz,每倍频程衰减40 dB。板和压电片的参数由表1所示。
本节对无需次级通道的分散式前馈控制算法的稳定性和控制效果进行了仿真和实验分析。
3.1 稳定性分析
首先对第1节的物理通道模型的矩阵进行了稳定性分析,之后对实测的次级通道数据进行稳定性分析。根据2.2节分析,若所提出的算法稳定,必须要满足Re[λi(H)]>0。控制单元的布放如图5所示。图6所示为物理通道模型和实测物理通道的稳定性,其中通道矩阵的频率范围从5~700 Hz,若通道在某频率满足稳定性条件则计为1,否则为0。
由图6知,用物理通道模型进行稳定性分析时,其在所测频带范围内都满足稳定性条件,这说明理论上当用同位配置的压电片执行器和速度传感器作为控制单元时,所提出的算法都是稳定的,并且由式(6)算得的物理模型通道都满足互易性原理,即通道矩阵满足HT=H。
实测物理通道依然在大部分频段范围内都稳定。个别频率处不稳定主要是由于压电片执行器和加速度传感器在安装时并未做到严格的同位配置,实验中,加速度传感器位置的微小偏移将会对算法稳定性有较大影响。解决的办法是可以用尺寸更小的加速度计尽量保持在低频时与压电片满足同位配置,或者采用力执行器代替压电片执行器,力执行器和速度传感器是严格同位配置的。

图4 压电片板实验系统Fig.4 The smart panel experimental system

图5 三对同位配置传感器的位置Fig.5 Positions of the three decentralized control units
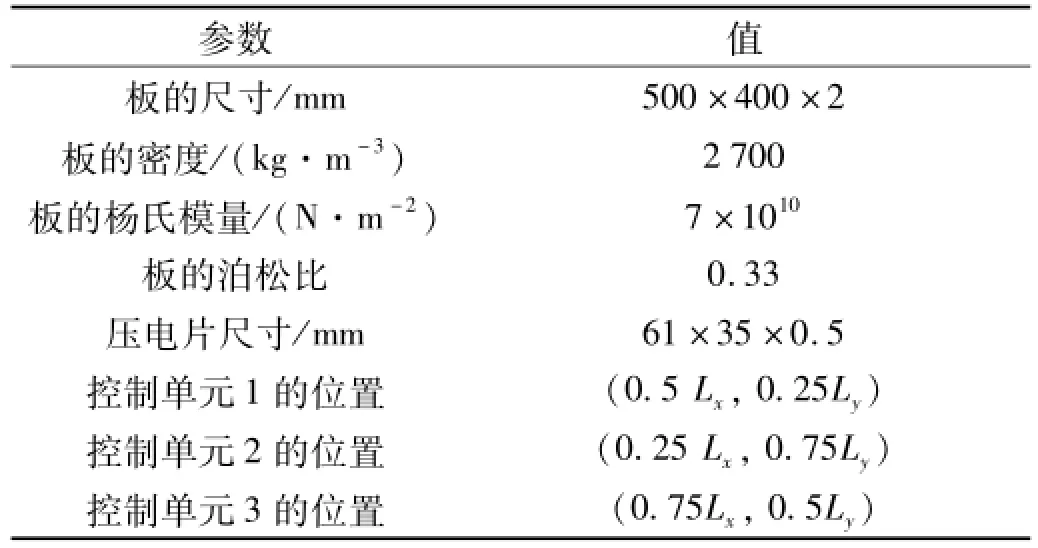
表1 板和压电片的参数Tab.1 Parameters of the p late and control units

图6 三个控制单元的稳定性分析Fig.6 Stability condition of three control units
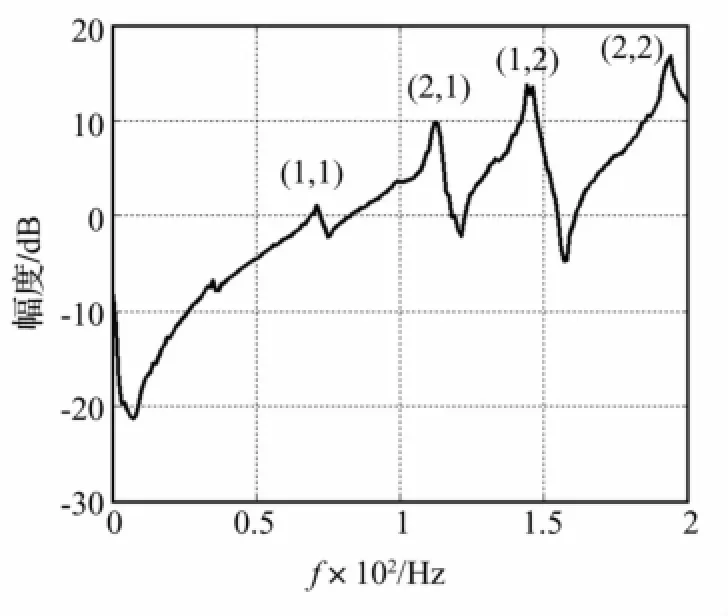
图7 控制单元2的传递函数Fig.7 Frequency response function of control unit2
图7所示为控制单元2的压电片执行器到加速度传感器之间的传递函数。板的前4阶共振频率分别为71 Hz、112 Hz、144 Hz和194 Hz。下节将选取85 Hz和105 Hz两个非共振峰频率进行控制,这两个频率是任意选取的,满足图6所示实测物理通道稳定的频率均可被控制。
3.2 控制效果的仿真结果
根据实测的物理通道对85 Hz和105 Hz的扰动进行仿真控制,控制结果如图8和图9所示。
由图8、9知,扰动频率为85 Hz和105 Hz时的仿真控制均是收敛的。85Hz和105Hz的收敛步长分别取为50和20。由于次级通道的不同,两个频率的收敛过程也有区别。图8中,算法是振荡收敛的,这主要是由于次级通道矩阵H的3个特征值的虚部较大导致,其3个特征值分别为0.010 5+0.049 3i;0.012 2+0.021 7i;0.032 2+0.038 2i。收敛过程在5 s内下降了约80 dB。图9中,算法收敛无振荡,这主要是由于次级通道矩阵H的3个特征值的虚部较小导致,其3个特征值分别为0.084 5-0.007 7i;0.020 0-0.001 0i;0.054 7-0.007 8i。收敛过程在5 s内下降了120 dB。
由仿真结果知,无需次级通道建模的前馈控制算法是可以收敛的,在满足收敛性条件的情况下,所提出的算法可能出现振荡收敛的情况,但不会发散。
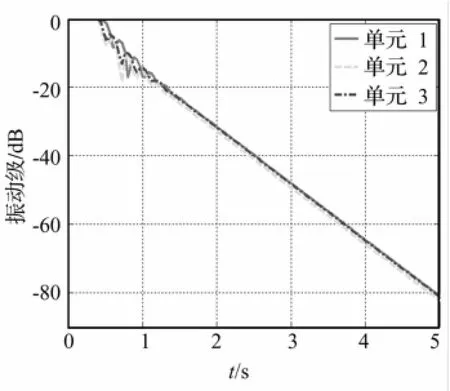
图8 85 Hz仿真控制效果Fig.8 Simulation control results at85 Hz
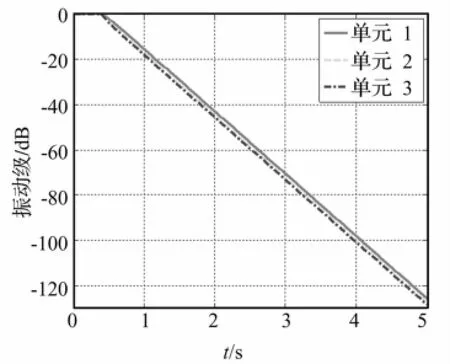
图9 105 Hz仿真控制效果Fig.9 Simulation control results at105 Hz
3.3 控制效果的实验结果
利用图4所示的实验系统,开展了无需次级通道建模的分散式前馈控制实验研究。分别对85 Hz和105 Hz的线谱进行控制,收敛步长的取值与仿真过程一样,分别为50和20。
扰动频率为85 Hz时的时域控制结果如图10所示,3个通道的频域控制结果如图11~13所示。由图10知,三个通道的时域控制过程均收敛,由于实验是在普通房间环境,板又较薄,因此本底噪声较大,并且考虑到压电片执行器有一定的非线性,导致收敛后的残余噪声较大。由图11~13知,实施控制后,3个传感器的频谱在85 Hz的幅度分别下降了78 dB、71 dB和72 dB。此外由于压电片执行器的非线性问题,实施控制后,传感器1、2的频谱在170 Hz和255 Hz的幅度均有一些提升,传感器3的频谱在以上两个频率的幅度变化不大。执行器的非线性问题可以由一系列的非线性控制算法解决。以上的整个收敛过程在5 s内下降了约70 dB,这和仿真结果类似。

图10 85 Hz时域实验控制效果Fig.10 Time domain experimental control results at 85 Hz

图11 单元1在85 Hz频域控制效果Fig.11 Frequency domain control results of unit1 at 85 Hz
扰动频率为105 Hz时的时域控制结果如图14所示,3个通道的频域控制结果如图15~17所示。和85 Hz控制结果类似,三个通道的时域控制过程在4 s内分别下降了88 dB、74 dB和71 dB,这和仿真结果类似。此外,压电片执行器在105 Hz时对该简支板实验系统的非线性作用较弱,从控制后的频谱图中可以看出无明显高次谐波产生,这主要是由于板在105 Hz的高次谐频处响应较小,控制效果较好。
根据以上的分析知,所提出的针对板结构的无需次级通道建模的分散式前馈控制算法能有效控制非共振频率处扰动,是一种有效的控制方法,而且该控制方法不需要对次级通道进行建模。
然而根据实测的物理通道进行稳定性分析时,发现算法的稳定性对控制单元中的执行器和传感器是否同位配置较为敏感,由于实验中应用的压电片执行器和加速度传感器并非是严格意义上同位配置的,因此测得的稳定性条件也并非在低频范围内都满足,这个问题可以通过更换执行器,用严格同位配置的力执行器和加速度传感器解决。本实验中实测的物理通道只在少数频点上不满足稳定性条件。
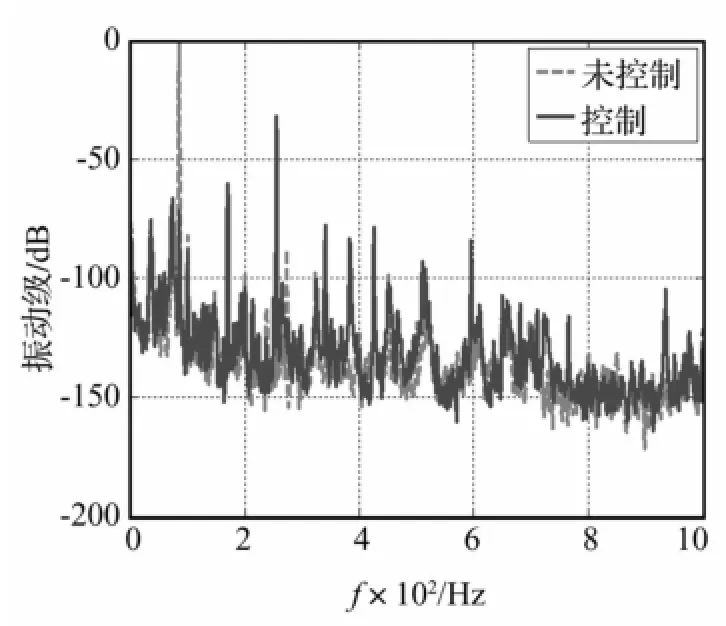
图12 单元2在85 Hz频域控制效果Fig.12 Frequency domain control results of unit 2 at85 Hz
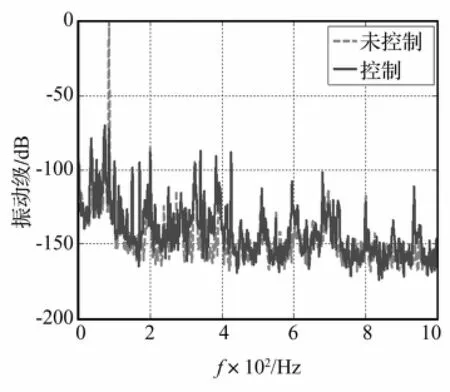
图13 单元3在85 Hz频域控制效果Fig.13 Frequency domain control results of unit3 at85 Hz

图14 105 Hz时域实验控制效果Fig.14 Time domain experimental control results at105 Hz

图15 单元1在105 Hz频域控制效果Fig.15 Frequency domain control results of unit1 at 105 Hz

图16 单元2在105 Hz频域控制效果Fig.16 Frequency domain control results of unit 2 at 105 Hz
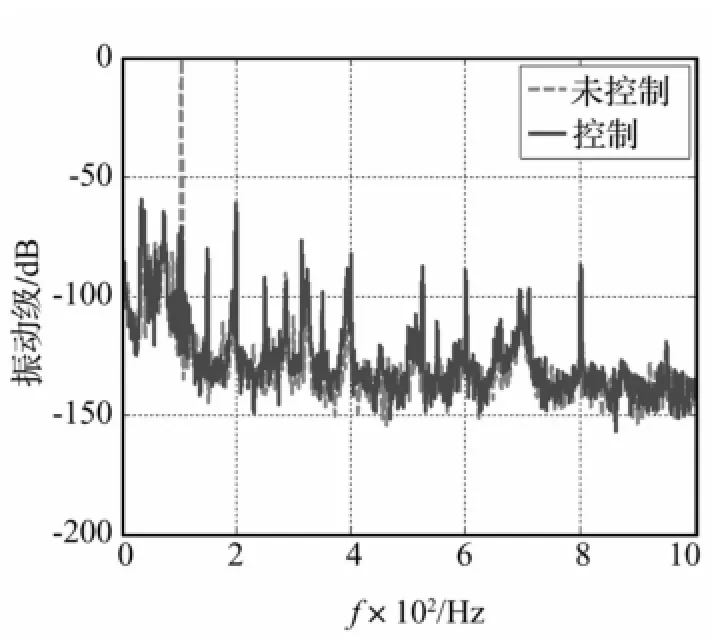
图17 单元3在105 Hz频域控制效果Fig.17 Frequency domain control results of unit 3 at105 Hz
4 结 论
本文针对板的振动,提出了一种无次级通道建模的分散式前馈控制方法。该前馈控制方法不需要结构的物理信息,并且从理论上被证明是稳定的。针对数字控制系统提出了一种内模滤波器,使用该滤波器能够将加速度信号转换成速度信号,并可以补偿数字控制系统中抗混叠滤波器和平滑滤波器的频响,由此保证执行器和传感器的同位配置。通过简支板振动主动控制的仿真和实验验证了所提算法的有效性。结果表明,该算法在实测物理通道满足稳定性的条件下能有效控制板的振动。
[1]Fuller C R,Elliott S J,Nelson P A.Active control of vibration[M].Academic Press,London,1996.
[2]Fahy F J,Gardonio P.Sound and structural vibration[M].Elsevier,London,2007.
[3]Preumont A.Vibration control of active structures[M].Kluwer Academ ic Publishers,Netherlands,2002.
[4]Elliott S J,Gardonio P,Sors TC,etal.Active vibroacoustic control with multiple local feedback loops[J].J.Acoust.Soc.Am.,2002,111(2):908-915.
[5]Gardonio P,Bianchi E,Elliott S J.Smartpanelwithmultiple decentralized units for the control of sound transmission.Part I:theoretical predictions[J].J.Sound.Vib.,2004,274:163-192.
[6]Baudry M,Micheau P,Berry A.Decentralized harmonic active vibration control of a flexible plate using piezoelectric actuator5-sensor pairs[J].J.Acoust.Soc.Am.,2006,119(1):262-277.
[7]Baumann O N,Elliott S J.The stability of decentralizedmultichannel velocity feedback controllers using inertial actuators[J].J.Acoust.Soc.Am.,2007,121(1):188-196.
[8]Zilletti M,Elliott S J,Gardonio P,et al.Experimental implementation of a self-tuning control system for decentralized velocity feedback[J].J.Sound.Vib.,2012,331:1-14.
[9]Gardonio P,Miani S,Blanchini F,et al.Plate with decentralized velocity feedback loops:Power absorption and kinetic energy considerations[J].J.Sound.Vib.,2012,331:1722-1741.
[10]Clark R L,Fuller C R.Experiments on active control of structurally radiated sound using multiple piezoceramic actuators[J].J.Acoust.Soc.Am.,1992,91(6):3313-3320.
[11]Elliott S J,Johnson ME.Radiation modes and the active control of sound power[J].J.Acoust.Soc.Am.,1993,94(4):2194-2204.
[12]Johnson ME,Elliott S J.Active control of sound radiation using volume velocity cancellation[J].J.Acoust.Soc.Am.,1995,98(4):2174-2186.
[13]靳国永.结构声辐射与声传输有源控制理论与控制技术研究[D].哈尔滨:哈尔滨工程大学,2007.
[14]靳国永,杨铁军,刘志刚.基于声辐射模态的有源结构声传入及其辐射控制[J].声学学报,2009,34(3):256-265.
JIN Gou-yong,YANG Tei-jun,LIU Zhi-gang,Active control of sound trasmission and radiation into an enclosure based on acoustic radiationmodes[J].Acta Acoustic,2009,34(3):256-265.
[15]张 军,姜 哲.基于声辐射模态的有源结构声辐射系统鲁棒H∞控制[J].振动与冲击,2010,29(4):135-137.
ZHANG Jun,JIANG Zhe,Robust H∞control for an active structure acoustic control system based on radiation modes[J],Journal of Vibration and Shock,2010,29(4):135-137.
[16]李 双,陈克安.结构声辐射有源控制中主导辐射模态的抵消及次级力的最优布放[J].噪声与振动控制,2006,26(6):62-67.
LISuang,CHEN Ke-an,Cancellation of dominant radiation modes and arrangementof secondary forces in active structural acoustic control[J],Noise and Vibration Control,2006,26(6):62-67.
[17]Elliott S J.Interaction between multiple feedforward active control systems[J].IEEE T SPEECH AUDI P,1994,2(4):521-530.
[18]Zhou D,Debrunner V.A new active noise control algorithm that requires no secondary path identification based on the SPR Property[J].IEEE TSPEECH AUDIP,2007,55(5):1719-1729.
[19]Wu M,Chen G Y,Qiu X J.An improved active noise control algorithm without secondary path identification based on the frequency-domain subband architecture[J].IEEE T SPEECH AUDIP,2008,16(8):1409-1419.
A novel decentralized feedforward control strategy for a plate vibration w ithout secondary path modeling using piezoelectric patch actuators
CAO Yin,SUN Hong-ling,LIXiao-dong
(Key Laboratory of Noise and Vibration Research,Institute of Acoustics,Chinese Academy of Sciences,Beijing 100190,China)
Here,a novel decentralized feedforward control strategy for a plate vibration without secondary path modeling was proposed.This control method did not need any structure information of a plate and it could be used to control the harmonic vibrations of a plate at its off-resonance frequencies.A theoreticalmodel and a test system for active vibration controlofa plate supported simply using piezoelectric patch actuators and accelerometerswere built.The stability of the controlmethod was analyzed theoretically and experimentally.Besides,a kind of internalmodal filter(IMF)was proposed,with it a acceleration signal could be converted into a velocity one.This IMF could guarantee the collocated properties of transducer pairs.Both simulation and test results showed that the decentralized feedforward control strategy is effective.
decentralized feedforward control;no secondary path modeling;active vibration control
TH532
A
国家自然科学基金资助(Y111031121)
2012-10-23 修改稿收到日期:2013-02-26
曹 寅男,博士,1986年生
孙红灵男,博士,副研究员,1980年生