基于信标时序补偿的机械振动无线传感器网络同步触发方法
2014-05-25汤宝平
裴 勇,汤宝平,邓 蕾,肖 鑫
(重庆大学机械传动国家重点实验室,重庆 400030)
基于信标时序补偿的机械振动无线传感器网络同步触发方法
裴 勇,汤宝平,邓 蕾,肖 鑫
(重庆大学机械传动国家重点实验室,重庆 400030)
针对无线传感器网络(WSN)在实现机械振动同步采集过程中,采集节点应该同时触发采集命令,同步触发误差应在一个采样周期内的要求,设计了一种基于信标时序补偿思想的WSN同步触发协议STBTC_P(the Synchronization Trigger protocol based on Beacon Timing Compensation)。协议基于IEEE 802.15.4协议标准开发多跳树状网络,以信标负载方式传输采集命令,在利用集中关联信标分配法避免信标冲突并实现全网时钟同步后,采用基于信标时序补偿思想的同步触发方法实现机械振动采集命令的多跳同步触发,为最终提高机械振动同步采集精度创造使能条件。最后,在自研采集节点WSN-G2上运行STBTC_P协议,并验证了其有效性。
无线传感器网络;机械振动;同步采集;IEEE 802.15.4
在使用无线传感器网络(WSN)进行机械振动监测时,为保证信号分析结果的准确性,需要对多测点振动信号进行同步采集[1-3]。然而,作为分布式采集系统,无线传感器网络对机械振动信号进行同步采集面临诸多难题[3-4],其中一个重要问题就是要实现采集命令同步触发。如果Sink节点发出采集命令后,各个采集节点触发采集命令的时间差过大,将直接影响同步采集精度;往往同步触发误差控制在一个采样周期内,可以为进一步采用重采样法、同步截取等方法实现同步采集建立良好的基础[4]。那么对于机械振动采集一般要求数kHz采样频率的情况,要使触发误差控制在一个采样周期内就相当困难。另外,受节点发送功率和能耗等限制,节点单跳发送距离只有数十米,往往组成多跳网络进行机械振动监测[5],那么在多跳网络中实现采集命令同步触发就更加艰难,并需要以各个采集节点实现时钟同步为基础[6]。
目前针对WSN全网时钟同步方法的研究较多,且取得了一些成果[7-8],但是针对机械振动采集命令同步触发方法的研究较少。针对这个问题,本文以IEEE 802.15.4协议[9]为底层基础,提出了一种信标时序补偿思想,并基于此思想设计实现了一种WSN同步触发协议STBTC_P(the Synchronization Trigger protocol based on Beacon Timing Compensation)。协议采用集中关联信标分配法解决多跳网络信标冲突问题,实现全网时钟同步,并提出基于信标时序补偿思想的同步触发方法,实现命令的多跳同步触发,为最终提高机械振动同步采集精度创造使能条件。
1 STBTC_P协议总体架构
STBTC_P协议采用TIMAC协议栈[10]作为底层基础,负责物理层和MAC层功能;另外还包括网络层模块、应用层模块、采集模块和上位机模块几个上层部分,协议总体架构如图1所示。

图1 STBTC_P协议栈总体架构图Fig.1 Overall architecture of STBTC_P
TIMAC协议栈是TI公司制定的IEEE802.15.4介质访问控制层(MAC层)协议栈,它基于CC2430芯片[11]实现了IEEE802.15.4协议的物理层和MAC层功能。IEEE802.15.4协议标准[9]不仅具有低功耗,低成本等优点,而且在它的信标使能模式下,父节点能够通过周期性发送信标实现与子节点之间的时钟同步,为实现全网时钟同步以及进一步实现各个采集命令同步触发提供了基础条件。
网络层和应用层模块作为STBTC_P协议的核心,对采集命令同步触发功能的实现起到关键作用。首先,在组网过程中,为了避免多跳网络中发生信标冲突并导致节点时钟同步失败,网络层模块采用集中关联信标分配法,由Sink节点统一为各个路由器安排信标发送时序,解决信标冲突问题,并实现全网时钟同步。然后,在应用层模块中,STBTC_P协议在全网时钟同步的基础上,根据各个父节点信标发送时序,采用信标时序补偿同步法达到机械振动采集命令多跳同步触发的目的。
采集模块作为采集命令的最终执行机构,采集命令在应用层模块中经过相应的时序补偿后下发到采集模块,并由采集模块同时触发AD转换器启动振动数据采集。
下面将对STBTC_P协议的功能进行详细描述。
2 STBTC_P协议功能实现
开始进行信号采集前,STBTC_P协议以簇树网络作为基本拓扑结构组建网络。除Sink节点外,网络中每个子节点有且仅有一个父节点,采集命令由Sink节点依次通过父子链路传送到各个采集节点,直至采集模块触发采集。要实现采集命令同步触发,各个采集节点的采集模块同时接收到命令是关键。
根据IEEE 802.15.4标准可知,在信标使能模式下,各个父节点不采用竞争机制发送信标,而是以广播的形式发送。因此,在单跳命令传输过程中,采用信标负载的方式,把采集命令包含在信标中发送给子节点,可使每个子节点同时接收到命令,如果立即下发给采集模块可达到同步触发的目的,如图2所示。
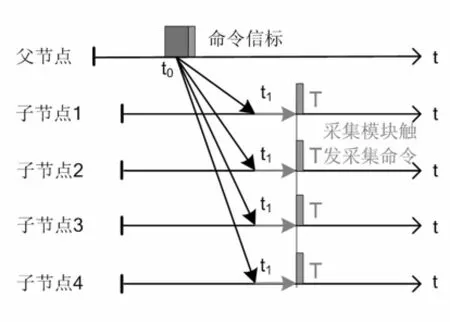
图2 信标负载命令发送方式示意图Fig.2 Beacons load mode of sending command
然而,在多跳簇树网络中,各个采集节点属于不同的父节点,它们分别发送各自的信标,如果采用信标负载的方式发送采集命令,当网络中多个设备同时发送信标时就有可能发生信标冲突,使得子节点无法正常接收到信标,导致采集命令丢失,系统同步采集失败。如图3所示的两种情况,节点N1因信标冲突而无法接收信标[12]。
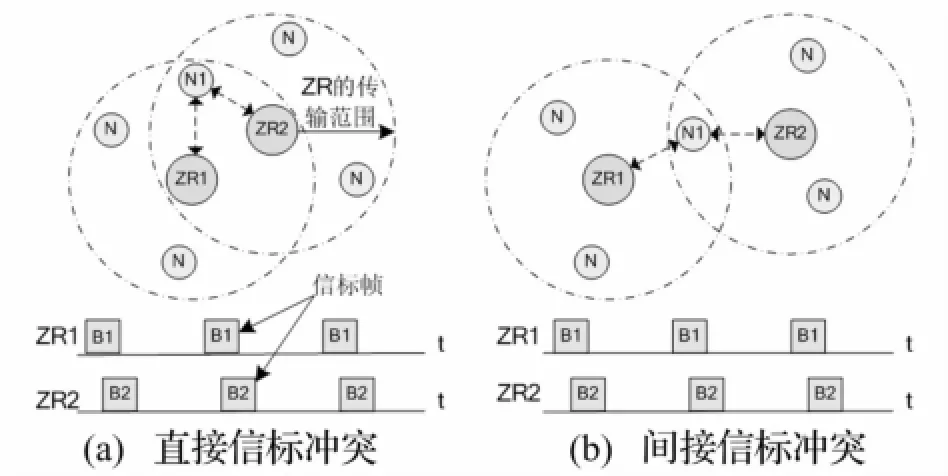
图3 信标帧冲突示意图Fig.3 Schematic diagram of beacon frame conflict
所以,在实现全网采集命令同步触发之前,必须先解决网络中信标冲突的问题。
2.1 避免信标冲突
IEEE 802.15.4标准引入了超帧结构,通过信标帧标定,把信道访问的时间分为活动区间和非活动区间,设备在活动区间访问信道,在其它时间处于低功耗休眠状态,并分别通过两个属性BO和SO描述信标发送间隔BI以及活动区间长度SD[9]。
根据这一特点,STBTC_P协议采用时分复用的思想,安排所有父节点分别在不同的时间段发送信标,把它们访问信道的活动区间区分开来,避免各个父节点的信标发生冲突。具体信标发送时序的安排方案如下所述:
首先,根据监测网络规模和网络中路由器的位置,在保证超帧结构的非活动区间能够满足所有其它邻居设备安排各自活动区间的同时,以信道利用率最大化为原则,设置合适的属性值SO和BO。然后,利用IEEE 802.15.4协议标准中超帧配置原语提供的参数“开始发送信标的时间”StartTime,由Sink节点采用集中关联时序分配法统一给网络中每个路由器分配合适的信标开始发送时间。StartTime是子路由器相对于其父节点信标发送时间的时间偏移。Sink节点采用集中关联时序分配法为每个路由器分配的StartTime为:StartTime=(1+offset×numRouter)×(SD+GT)
公式中numRouter为同一深度中已入网的兄弟路由器个数;GT是为了保证父节点和子节点的超帧不冲突而添加的一段基本保护时间,取GT=SD/16;offset为每个兄弟路由器和它所有子孙路由器的信标发送时间偏移总量:其中:Rm为每个父设备最多允许关联的路由器个数,Lm为网络最大深度,参数d为申请路由器的深度。

最后,路由器获得参数StartTime后,在其父节点发送完信标后,等待StartTime时间再开始发送信标,使得它的信标不和其它任何信标发生冲突,保证信标接收正常。信标发送具体过程如图4所示。
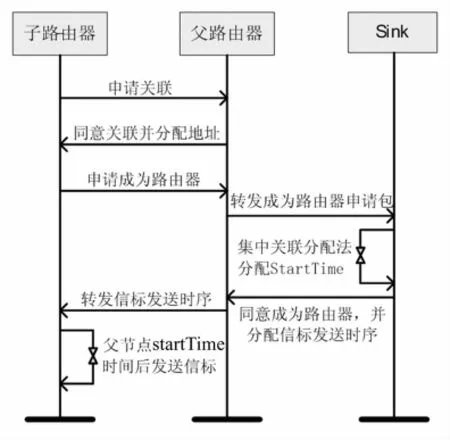
图4 路由器发送信标流程图Fig.4 Schematic diagram of routers transmit beacon process
2.2 采集命令同步触发
解决了信标冲突问题后,由Sink节点采用信标负载的方式发出采集命令,但是这样只能保证网络中同一父节点的几个采集子节点同时接收到命令信标,而无法实现全网采集命令的同步触发。因为在多跳网络中,子节点只有在活动区间才能接收父节点的信标,采集命令信标必须经过父节点转发才能到达采集子节点,而每个父节点都有自己独立的信标发送时序,这就导致网络中各个父节点的采集子节点接收到命令信标的时间各不相同,如果采集节点立即把命令下发到采集模块,就无法达到各节点采集命令同步触发的要求。如图5(a)所示,三个采集节点分别在TA1、TA2和TA3开始采集。

图5 信标时序补偿同步触发Fig.5 Beacon timing compensation synchronous trigger
考虑到采集子节点接收到命令信标的时间取决于其父节点发送信标的时序,STBTC_P协议根据信标时序分配的特点,采用信标时序补偿的方法解决多跳网络中采集命令同步触发问题。其主要思想是各个采集子节点接收到命令信标之后,并不立即把命令下发到采集模块去执行,而是分别根据各自父节点的信标发送时序等待相应的补偿时间之后再发送,达到同步触发的目的,因此此方法必须以全网节点时钟同步为前提。
根据IEEE 802.15.4标准提供的子节点与父节点时钟同步机制[9],在信标使能模式下,父节点周期性的发送带有时间戳的信标。各个子节点成功加入网络后,通过接收父节点信标、解析信标中的时间戳并记录接收信标的时间实现和父节点间的时钟同步。然后在多跳簇树网络中,各个父节点分别通过发送信标来同步子节点的时钟,并依次和各自父节点的时钟同步,最终实现全网节点时钟同步。
全网时钟实现同步后,可以使用信标时序补偿方法来实现采集命令的同步触发,为每个父节点的采集子节点安排合适的同步触发补偿时间。
根据监测网络规模获得网络中所有信标发送设备的最大数目N=R0m+R1m+…+RLm-1m,那么节点N是最后一个发送信标的父节点,它的采集子节点接收到采集命令后立即下发到采集模块,设置其补偿时间backoff_N为0,而Sink节点作为第一个发送信标的父节点,它的采集子节点的补偿时间backoff_0为:
backoff_0=(N-1)×(SD+GT)
网络中第n个信标发送设备的采集子节点的补偿时间backoff_n应为:
backoff_n=backoff_pn-StartTime_n
其中:backoff_pn为第n个信标发送设备的父节点的补偿时间;StartTime_n为第n个信标发送设备相对于其父节点信标发送时间的时间偏移。
同步触发补偿时间由各个父节点设置好,和采集命令一起添加到信标负载中发送给采集子节点,采集子节点接收到父节点带有命令和补偿时间的信标后,解析信标负载获得补偿时间,并等待相应的补偿时间之后把命令下发给采集模块执行,达到同步触发的目的,如图5(b)所示,三个采集节点同时在时间TA开始采集。
3 性能验证与分析
为了验证STBTC_P协议获得的同步触发精度,本文以WSN-G2节点搭建平台进行验证实验。WSNG2节点是针对机械振动监测应用而设计的WSN采集/路由节点,它采用双核心架构,核心1采用先进的STM32微控制器和独立的高采样率、高分辨率的A/D转换器,负责振动信号的采集;核心2采用TI公司开发的CC2430射频芯片[11],是STBTC_P协议的主要运行平台,两个核心通过串口通信,节点实物如图6所示。
3.1 节点时钟同步精度
为了测试网络中父节点信标发送时序以及时钟同步精度,组建一个三跳网络,包含1个Sink节点、5个路由父节点和7个采集子节点,组网参数分别为:BO=7,SO=4,Cm=4,Rm=2,Lm=3。组成的三跳网络的拓扑结构如图7所示。

图6 WSN-G2节点实物图Fig.6 The prototype ofWSN-G2 node

图7 三跳网络拓扑图Fig.7 The topology map of three-hop network
利用协议抓包工具Packet_Sniffer抓取网络信道中所有信号包,包括每个信标发送设备加入网络之后发送的所有周期的信标帧,图8显示了在其中任意选取的一个信标周期内抓取的所有信标帧。
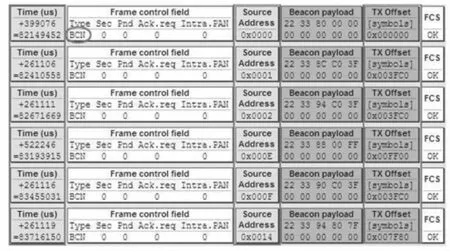
图8 信标发送时序图Fig.8 The diagram of beacon transm ission timing
图中深色框圈住的列依次是接收信标的时间间隔、发送节点地址以及信标发送StartTime值,依图可知,在这个任意选取的信标周期中,各个设备都按照各自的发送时序发送信标,没有发生信标碰撞,说明集中关联时序分配法可以很好地避免多跳信标碰撞问题。
根据接收信标的间隔还可以获得节点间的时钟同步精度。节点1和节点E同为Sink节点0的子节点,它们的理论StartTime值分别为261 120μs和1 044 480 μs(0x3fc0和0xff00个符号周期,每个符号周期16μs[9]),而它们相对于父节点0的实际发送间隔分别为261 106μs和1 044 463μs,与理论值分别相差14和17μs;节点E与节点2间的信标间隔522246μs与理论值522 240μs((0xff00-0x3fc0-0x3 fc0)个符号周期)只相差6μs。依此方式依次比较,可获得这个信标周期内最大偏差为17μs,最大时钟同步误差也就是17μs。
分别对其中20个信标周期中的最大偏差进行统计,计算它们的均值和方差,并重复组建十次相同的网络进行相同的统计实验,统计结果如图9所示。从图中可以看出,各个节点间的时钟同步误差平均在20μs内,相对于无线传感器网络中两种常用的时钟同步算法FTSP和TPSN分别达到的67μs[13]和50μs[14]时钟同步精度具有较大的优势。
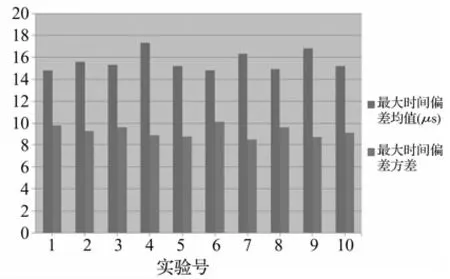
图9 多节点时钟同步精度测试统计结果Fig.9 The synchronous accuracy of nodes’clock
3.2 命令同步触发精度
测试同步触发精度时,由Sink节点发送采集命令,用逻辑分析仪捕获每个采集节点触发采集时AD转换器上引脚的变化时序来获得节点的同步触发误差。如图10所示,7个采集节点间命令触发的最大时间误差约为175μs。
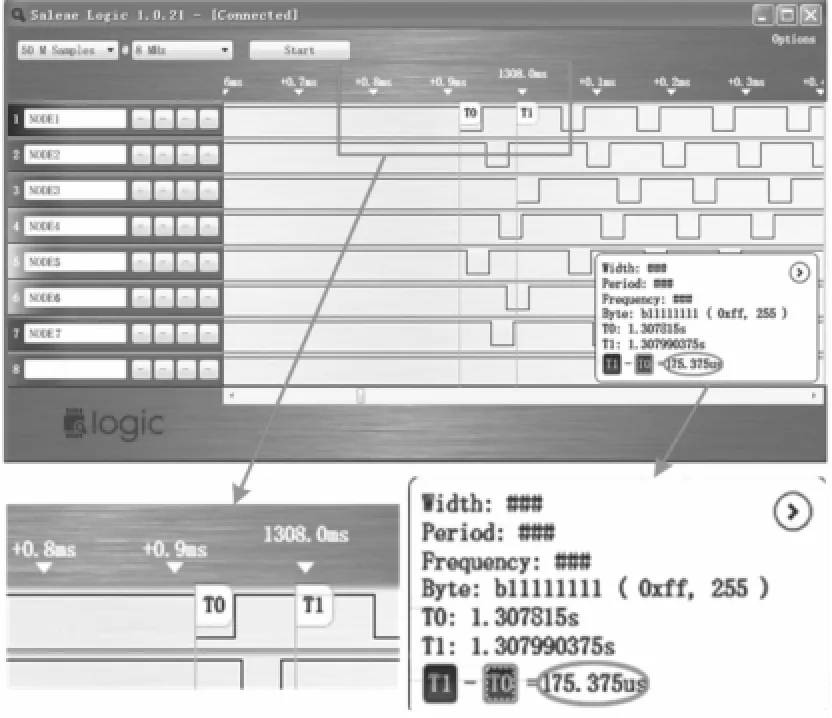
图10 同步触发误差测试Fig.10 The error test of synchronous trigger
为了测试同步触发效果以及网络跳数对精度的影响,本文分别组成单跳、双跳和三跳网络重复进行20次相同的实验,统计各自的最大同步误差,结果如图11所示。

图11 多节点命令同步触发精度测试结果Fig.11 The synchronous accuracy of nodes triggering command
从图中可以看出,单跳网络中命令触发最大误差低于100μs,可以保证在10 kHz采样速率下,各个采集节点采集第一个信号点的最大时间差低于一个采样周期,可以为10 kHz同步采样建立同步触发基础;而双跳和三跳网络低于300μs的最大误差也能达到3 kHz采样速率的同步触发要求,满足一般机械振动同步采集要求。
从图11中还可以看出,多跳网络的同步触发误差相对于单跳网络增大明显,但是三跳网络相对于双跳网络并没有明显的增大。通过实验分析发现其中一个主要原因就是因为STBTC_P协议的底层基础TIMAC采用了一种非抢占型多任务OS操作系统,在单跳网络中,采集节点接收到采集命令后立即开始采集,不需要时间补偿;而在多跳网络中,采集节点需要等待相应的补偿时间后才能开始采集,而每个节点的时间补偿是通过OS操作系统来完成的,这在一定程度上增大了同步误差。为了进一步提高多跳同步触发精度,下一步将尝试直接采用芯片上的硬件定时器来提供补偿时间,并引入实时操作系统,改进完善底层协议。
4 结 论
针对机械振动信号同步采集应用中需要各个采集节点采集命令同步触发的要求,设计了一种无线传感器网络机械振动采集命令多跳同步触发协议,采用集中关联信标分配法解决了多跳网络中信标冲突问题,并提出了信标时序补偿法实现采集命令的多跳同步触发。
在本文基础上,我们的后续工作将尝试直接采用芯片上的硬件定时器来提供补偿时间,并引入实时操作系统,改进完善底层协议,提高命令同步触发精度,并进一步研究重采样法和同步截取法等同步采集方法,提高同步采集精度。
[1]Xiao H,Lu C,Ogai H.A multi-hop low cost time synchronization algorithm forwireless sensor network in bridge health diagnosis system[C]//Embedded and Real-Time Computing Systems and Applications(RTCSA),2012 IEEE 18 th International Conference on.IEEE,2012:392-395.
[2]Krishnamurthy V,Fowler K,Sazonov E.The effect of time synchronization of wireless sensors on the modal analysis of structures[J].Smart Materials and Structures,2008,17(5):1-13.
[3]汤宝平,曹小佳,张国垒.机械振动监测中的无线传感器网络时间同步研究[J].中国机械工程,2010,21(10):1190-1194.
TANG Bao-ping,CAO Xiao-jia,ZHANG Guo-lei.Time synchronization of wireless sensor networks for mechanical vibration monitoring[J].Chinese Journal of Mechanical Engineering,2010,21(10):1190-1194.
[4]Rice J A,Billie F S J.Flexible smart sensor framework for autonomous full-scale structural health monitoring[R].Newmark Structural Engineering Laboratory Report Series 018,2009.
[5]汤宝平,贺 超,曹小佳.面向机械振动监测的无线传感器网络结构[J].振动、测试与诊断,2010,30(4):357-361.
TANG Bao-ping,HE Chao,CAO Xiao-jia.Topology of wireless sensor networks for mechanical vibration monitoring[J].Journal of Vibration,Measurement&Diagnosis,2010,30(4):357-361.
[6]Hu X Y,Wang BW,JiH.A wireless sensor network-based structural health monitoring system for highway bridges[J].Computer-Aided Civil and Infrastructure Engineering,2013, 28(3):193-209.
[7]Maróti M,Kusy B,Simon G,et al.The flooding time synchronization protocol[C]//Proceedings of the 2nd International Conference on Embedded Networked Sensor Systems.ACM,2004:39-49.
[8]Elson J,Girod L,Estrin D.Fine-grained network time synchronization using reference broadcasts[J].ACMSIGOPS Operating Systems Review,2002,36(SI):147-163.
[9]IEEE 802.15.4.Wireless Medium Access Control(MAC)and Physical Layer(PHY)Specification for Low-Rate WireLess Personal Area Networks(LR-WPANs)[S].New York:IEEE Standard Committee,2006.
[10]Texas Instruments.802.15.4 MAC User’s Guide For CC2430.2009.
[11]Texas Instruments.CC2430 Datasheet[EB/OL].http://focus.ti.com/docs/prod/folders/print/cc2430.htm l.
[12]Koubaa A,Cunha A,Alves M.A time division beacon schedulingmechanism for IEEE 802.15.4/Zigbee cluster-tree wireless sensor networks[C]//19th Euromicro Conference on Date of Conference.Pisa:2007:125-135.
[13]Kim S,Pakzad S,Culler D,et al.Healthmonitoring of civil infrastructures using wireless sensor networks[C]//Information Processing in Sensor Networks,2007.IPSN 2007,6th International Symposium on.IEEE,2007:254-263.
[14]Ganeriwal S,Kumar R,Srivastava MB.Timing-sync protocol for sensor networks[C]//Proceedings of the 1st International Conference on Embedded Networked Sensor Systems.ACM,2003:138-149.
AWSN mechanical vibration synchronous acquisition trigger protocol based on beacon tim ing com pensation
PEIYong,TANG Bao-ping,DENG Lei,XIAO Xin
(The State Key Laboratory of Mechanical Transmission,Chongqing University,Chongqing 400030,China)
Aiming at the requirement that the sample commands of all the nodes should be triggered synchronously and the synchronization error should be less than one sampling period in the process ofmechanical vibration synchronous acquisition using a wireless sensor net(WSN),a WSN synchronization trigger protocol based on beacon timing compensation was designed.The protocol was developed based on IEEE 802.15.4 Standard,the acquisition commands were transmitted with beacon.A good foundation for synchronization acquisition by effectively avoiding beacon conflicts with the centralized associated beacons allocationmethod firstly and then achieving trigger synchronization with the beacon timing compensation method for a multi-hop network was established.Finally,the proposed protocalran on the selfdesigned acquisition nodeWSN-G2 and its effectivenesswas verified.
wireless sensor network(WSN);mechanical vibration;synchronous acquisition;IEEE 802.15.4
TP393.1;TH17
A
国家自然科学基金资助项目(51375514);高等学校博士学科点专项科研基金资助(20130191130001);机械传动国家重点实验室科研业务费(SKLMT-ZZKT-2012 MS 09)资助
2012-12-17 修改稿收到日期:2013-03-11
裴 勇男,硕士生,1988年4月生
汤宝平男,博士,教授,博士生导师,1971年9月生