三向耦合非线性重型汽车建模及动力学分析
2014-05-25李韶华杨绍普陈立群
李韶华,杨绍普,陈立群
(1.石家庄铁道大学机械工程学院,石家庄 050043;2.上海大学力学系,上海 200444)
三向耦合非线性重型汽车建模及动力学分析
李韶华1,杨绍普1,陈立群2
(1.石家庄铁道大学机械工程学院,石家庄 050043;2.上海大学力学系,上海 200444)
分析汽车各向运动的耦合作用规律,建立23自由度三向耦合重型汽车整车模型,推导系统运动微分方程。将非线性Gim模型与垂向点接触轮胎模型结合描述三向非线性轮胎力,建立6个一阶常微分方程,以实时计算各车轮转速计算滑移率。通过数值积分计算车辆转向制动、匀速直线及方向盘角跃阶时的动态响应,并与传统的操纵稳定性模型、平顺性模型、虚拟样机模型及试验数据比较,验证所建模型的有效性。通过分析耦合作用对汽车响应影响表明,该耦合模型可同时研究汽车在复杂工况的平顺性、操纵稳定性及制动性。
三向耦合;重型汽车;建模;非线性轮胎力;整车动力学
汽车动力学研究分垂向动力学、侧向(或横向)动力学及纵向动力学三个领域。垂向动力学研究范畴为行驶平顺性,主要研究轮胎垂向力引起的汽车垂向、俯仰及侧倾运动。侧向动力学研究范畴为操纵稳定性,主要研究轮胎侧向力引起的汽车侧滑、横摆及侧倾运动。纵向动力学研究范畴为驱动/制动性,主要研究轮胎纵向力引起的驱动滑转及制动滑移。为减少分析难度及计算量,多针对汽车垂向、侧向、纵向动力学分别建模,并忽略次要因素。并取得丰富成果;但在转弯制动、变更车道、避障等复杂工况下,路面不仅为汽车提供侧向力、纵向力,亦为悬架提供垂直路面激励,汽车垂向、侧向及纵向动力学性能相互耦合相互影响。将汽车垂向、侧向、纵向动力学结合,建立三向耦合汽车模型,综合研究复杂工况的整车动力学行为极具挑战。
已有对汽车各向耦合作用探索,所建耦合模型大致分四类。①纵、侧向耦合模型:不考虑车辆垂向、俯仰、侧倾运动,主要研究车辆操纵稳定性及转向、驱动\制动性能[1-3];②侧、垂向耦合模型:假设车辆匀速行驶,主要研究转向与悬架系统的相互作用[4-7];③纵、垂向耦合模型:假设汽车直线行驶,不考虑转向及侧滑运动;但驱动\制动力矩不合理会导致汽车侧滑、甩尾、方向失控及侧翻,涉及侧向动力学问题,故较少对纵、垂向耦合模型单独建模。④三向耦合模型:同时考虑汽车的平顺性、操纵稳定性及驱动\制动性能,主要研究汽车整车响应仿真及全局底盘控制(GCC)。Chou等[8-9]分别建立14自由度三向耦合模型,利用主动悬架及制动力矩设计GCC控制策略,提高汽车舒适性及操纵稳定性,但模型只考虑侧向与纵向、侧向与侧倾、纵向与俯仰运动耦合。郭孔辉[10]建立三向耦合的12自由度两轴汽车模型,并数值计算分析汽车直线制动、转弯制动的稳定性,但模型中未考虑簧下质量的垂向振动。王威等[11-12]分别建立三向耦合汽车模型研究整车动力学行为。目前三向耦合汽车模型中考虑的耦合因素尚不全面,其适用性、耦合作用对汽车三向动力学影响及试验验证有待深入研究。
随多体动力学及计算机技术发展,出现功能化虚拟样机模型(Functional Virtual Prototyping,FVP)。FVP模型可详细反映汽车系统结构及动的耦合作用,进行整车虚拟实验,因此颇受重视[13];但目前的FVP模型大多基于ADAMS、SIMPACK等商用软件建模、仿真,存在诸多局限性:①数值算法内置。用户不便据自己的模型进行修改,与Fortran、C++语言编制的程序相比计算效率低、结果易发散;②建模中需大量参数,包括车辆构件几何参数、运动副类型及悬架、轮胎动态测试数据等。由于涉及汽车生产商业机密较难获取,从而影响建模的准确性及可行性;③复杂工况设置的局限性。软件中角阶跃、移线、稳态回转等转向工况未考虑路面不平顺,不能研究转向、制动及路面不平顺激励对汽车三向动力学影响。较FVP模型而言,建立三向耦合的集中参数模型可用较少参数获取车辆系统动力学本质,能清楚反映汽车各向运动间耦合作用,且计算效率高、利于研究整车动力学行为与集成控制策略。
重型汽车惯性大、车身长、侧倾中心高,高速行驶时稳定性差,易产生甩尾、侧翻等失稳现象,甚至造成重大事故,各向耦合作用更明显。因此,本文在研究汽车各向运动耦合作用基础上,针对重型汽车建立23自由度三向耦合模型。通过与操纵稳定性模型、平顺性模型、虚拟样机模型及实验数据比较,验证所建模型的有效性,并从运动耦合角度分析导致模型间差别原因。所建模型及研究结果可为汽车三向动力学及集成控制研究提供新思路。
1 车辆各向运动耦合作用
车辆各向运动耦合作用见图1,图中含地面静止坐标系(X,Y,Z)与车辆运动坐标系(x,y,z)。x、y、z、φ、θ、ψ分别代表车辆纵向、侧向、垂向、侧倾、俯仰及横摆运动。

图1 车辆各向运动的耦合作用Fig.1 Coupling effects of vehiclemotions in different directions
由图1(a)看出,车辆纵向运动受横向及横摆运动影响,考虑横摆角变化量dψ较小并忽略二阶微量,t~t+d t时刻纵向速度变化量[14]为

由图1(b)看出,车辆纵向运动受垂向、俯仰运动影响,考虑俯仰角变化量dθ较小并忽略二阶微量,t~t+d t时刻纵向速度变化量为

图1(d)、(e)为车辆运动的三维矢量图。t~t+d t时刻,纵向速度x·除大小发生变化d x·,亦会绕y轴转过dθ、绕z轴转过dψ。同理,侧向速度y·可能绕x轴转过dφ、绕z轴转过dψ;垂向速度z·可能绕x轴转过dφ、绕y轴转过dθ。考虑转角变化量较小并忽略二阶微量,可推导得纵向速度变化量为
2 三向耦合重型汽车建模
针对三轴重型汽车建立23自由度的三向耦合非线性模型,见图2。该车为前轮转向后轮驱动的后八轮重型卡车。模型中考虑驾驶室垂向、俯仰、侧倾运动zc,θc,φc,车架垂向、俯仰、侧倾运动zb,θ,φ,整车横摆、纵向、侧向运动ψ,x,y,三车轴垂向、侧倾运动zui,φui(i=1~3),后悬架左右平衡杆俯仰运动θp1,p2,及六个车轮的旋转运动共23个自由度。图2中Mb,Mc分别为车厢、驾驶室质量;I,Iu为整车及车轴转动惯量;Fsij为悬架作用力;Ftxij,Ftyij,Ftzij为纵向、横向及垂向轮胎力,i=1~3为轴数,j=1~2代表左右。车辆坐标系(x,y,z)原点选整车质心垂线与侧倾轴交点。hs,ls为车厢质心至坐标原点的高度及纵向距离。dt1,dt2为前、后轮距;ds1,ds2为前、后悬架上弹簧距离。
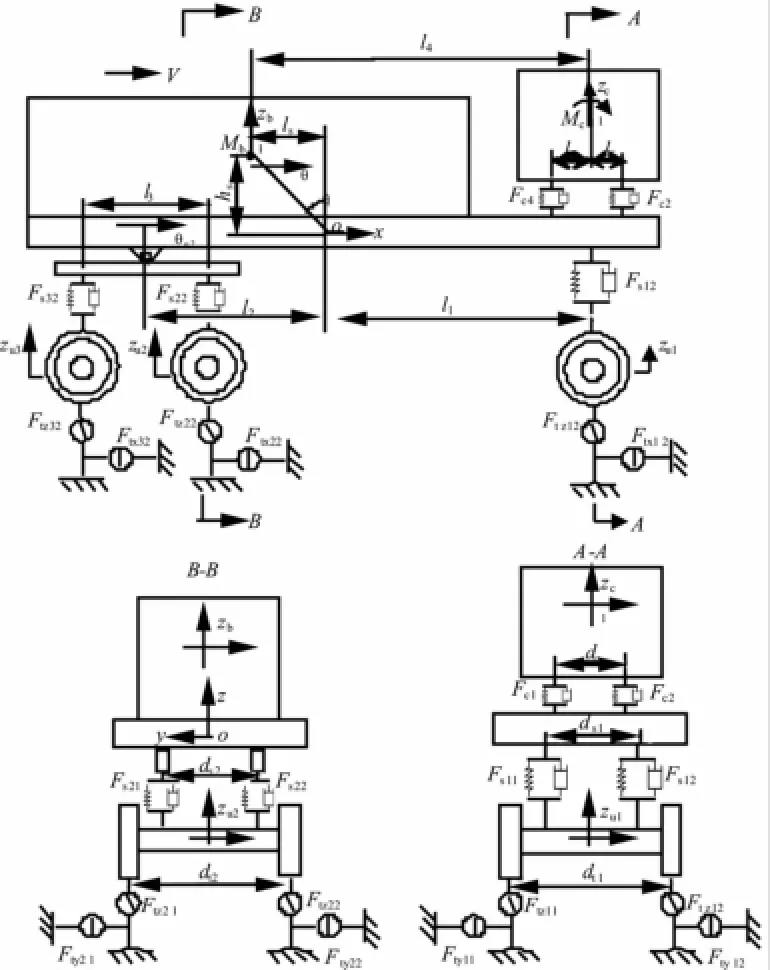
图2 23自由度三向耦合重型汽车模型Fig.2 Three-directional coupled heavy vehiclemodel with 23-DOF
2.1 车辆系统运动微分方程
由于车厢尺寸较大,横摆、俯仰及侧倾运动与其它运动耦合作用较明显,故本文考虑车厢各向运动耦合作用及因整车质心与车厢质心不重合造成的运动耦合。利用达朗贝尔原理对重型汽车模型(图2)建立23个运动微分方程。
(1)整车纵向运动

式中:Fci(i=1~4)为驾驶室与车厢间悬架作用力;Fsij(i=1~3,j=1~2)为车厢与车轴间悬架作用力。
10个作用力表达式为
镇长出来打圆场。行了行了,孙村长不要发火。牛爹,你是个通情达理的人。你看啊,化工厂为了报答乡邻,要帮我们建一个农科基地。说不定将来你也会得好处。何必设障碍呢。
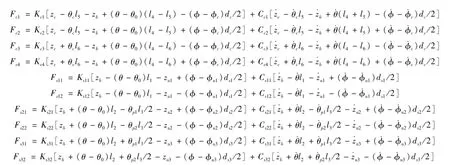
(7)左、右侧平衡杆俯仰运动

式中:Tsij为各轮驱动力矩;Tbij为各轮制动力矩;i=1~ 3,j=1~2。
2.2 三向轮胎力模型
轮胎垂向力采用平方非线性模型,即
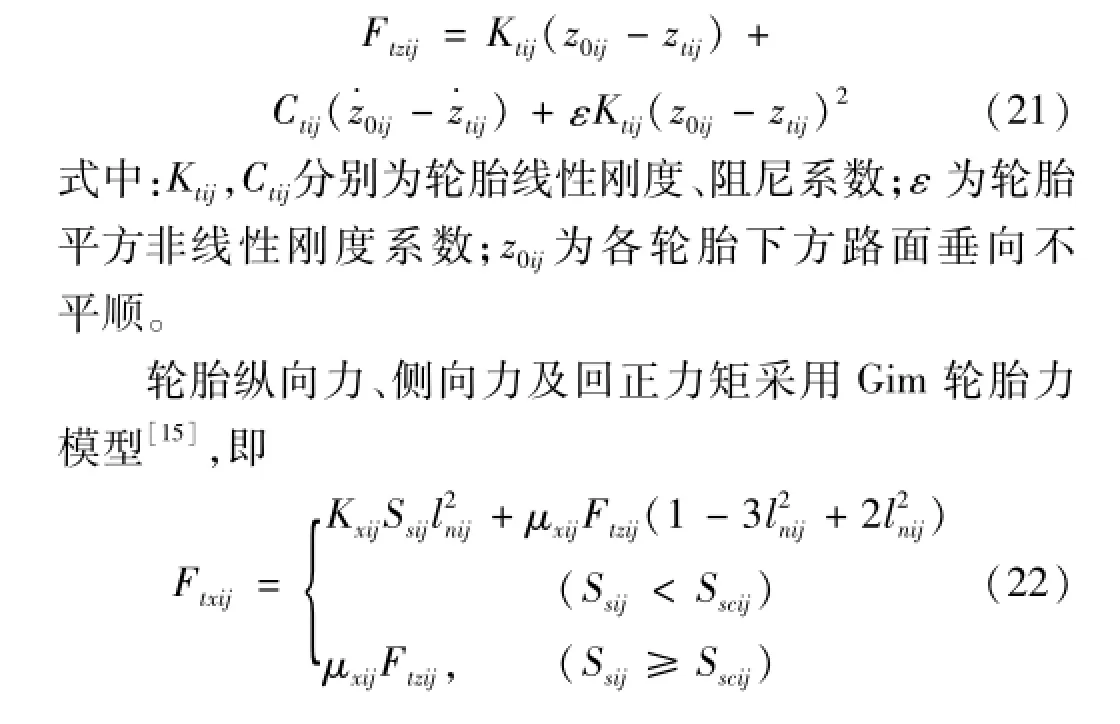

式中:Vx为车辆纵向速度;ωij为各车轮转速;Kxij为轮胎纵向刚度;Kαij为轮胎横向刚度。
据车轮旋转运动方程可得车轮转速,从而实时计算各轮胎纵向滑移率。将纵向滑移率及转向角代入式(22)~式(24),即可实时计算各车轮纵向、侧向轮胎力及回正力矩。
2.3 计算流程
3 模型验证
为验证所建三向耦合模型的有效性,分析三向耦合作用对汽车动力学影响,建立传统的9由度操纵稳定性模型、8由度半车平顺性模型及基于ADAMS的虚拟样机(FVP)模型并与三向耦合模型进行比较。由现场实验数据进一步验证三向耦合模型的有效性。
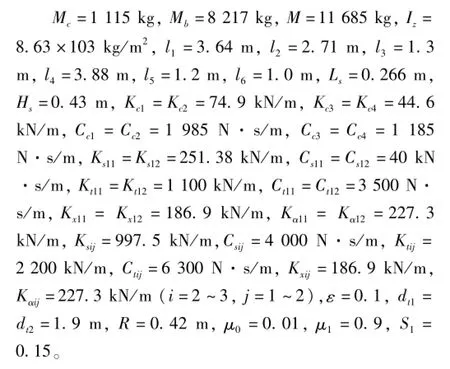
汽车空载较满载振动剧烈,可更好反映各方向振动间耦合作用。因此,选东风DFL1250A9载货汽车空载参数进行仿真,即
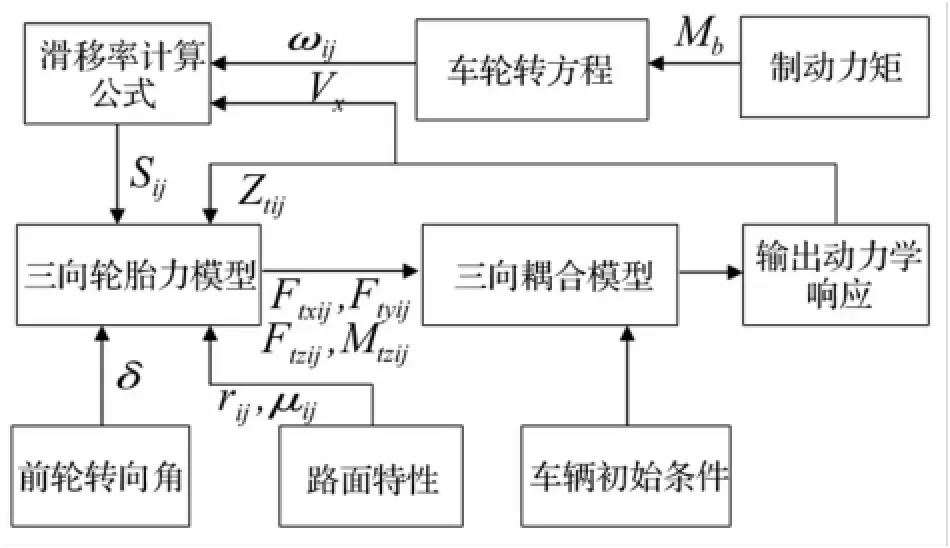
图3 三向耦合汽车动力学计算框图Fig.3 Calculation diagram for dynamics of three-directional coupled vehicle
3.1 与操纵稳定性模型比较
考虑车体纵向、侧向、横摆及6车轮的旋转运动,本文建立9自由度重型汽车操纵稳定性模型[17]。其运动微分方程为
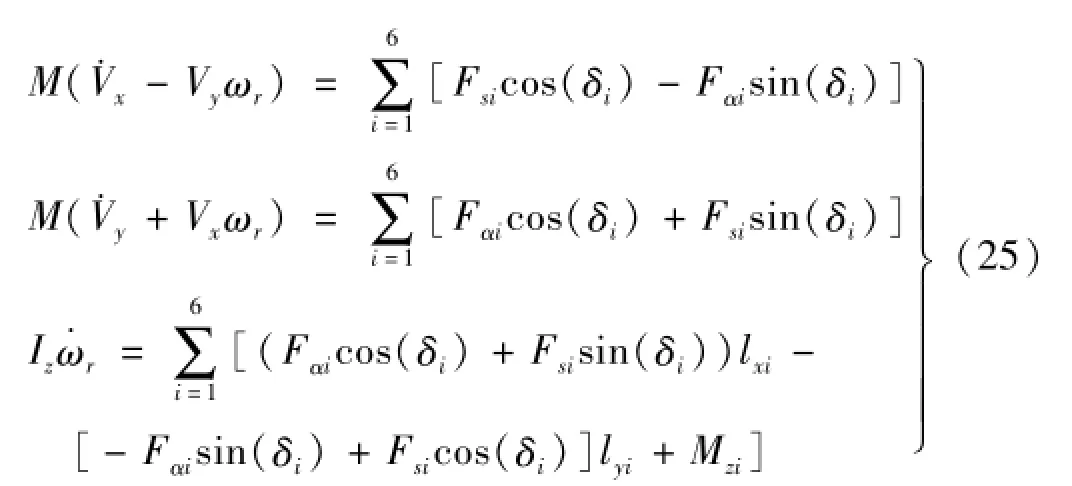
式中:M,Iz为车辆总质量及转动惯量;Vx,Vy,ωr为纵向、侧向及横摆角速度;δi,Mzi为轮胎转向角及回正力矩;lxi,lyi为车体质心至轮心纵向、侧向距离。
简谐激励下的汽车响应具有确定性,可更清楚比较耦合模型与传统模型区别。因此,路面不平顺选幅值0.002 m、波长10 m的正弦激励。以转向制动联合工况为例,取初始车速40 km/h、积分步长1 ms,3 s时制动,4 s时转向。转向角为幅值0.15 rad的阶跃激励,制动力矩分别为950 N·m及9 500 N·m。利用三向耦合模型与9DOF传统模型分别计算获得车辆响应,见图4。由图4看出,①三向耦合模型与传统模型计算结果在数量级及趋势上均较相近。由此证明两种模型的有效性,但传统模型不能反映车辆垂向、侧倾、俯仰等运动,而三向耦合模型可同时计算汽车各方向响应。②两种模型侧向加速度差别最大,行驶轨迹、车速及横摆角速度差别较小。因制动引起的车厢俯仰运动、转向引起的车厢侧倾运动均对车厢横摆影响较大,传统模型不能考虑俯仰、侧倾运动,因而与耦合模型计算结果存在差别。③耦合模型侧向加速度均小于传统模型。此因耦合模型据式(5)计算车体侧向加速度,须考虑垂向速度与侧倾角速度乘积,而传统模型不能考虑车辆的垂向、侧倾运动。④在大制动力矩下,汽车横摆角速度及侧向加速度随时间有下降趋势。因此,汽车转弯时减速行驶可提高操纵稳定性。
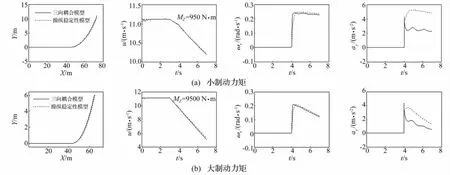
图4 三向耦合模型与操纵稳定性模型比较Fig.4 Compare of three-directional coupled model and handling stability Model
3.2 与平顺性模型比较
建立8自由度三轴重型汽车半车平顺性模型见图5,考虑车体垂向、俯仰,驾驶室垂向、俯仰,平衡杆俯仰及三轮胎的垂向运动。各符号意义同三向耦合模型,轮胎垂向力用式(21)平方非线性模型。以匀速直线工况为例,取初始车速40 km/h、积分步长1ms。路面不平顺选幅值0.002 m、波长10 m的正弦激励。利用三向耦合汽车模型与传统半车平顺性模型计算获得车辆响应,见图6。两种模型响应幅值对比见表1。
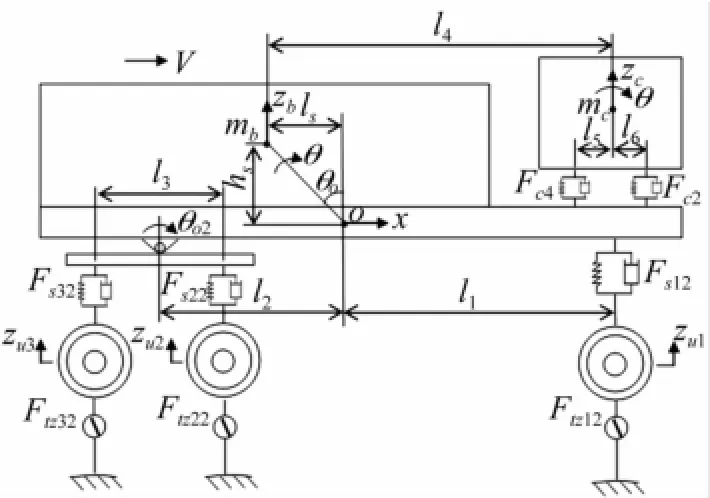
图5 八自由度半车平顺性模型Fig.5 Half-vehiclemodel for ride comfortwith 8-DOF
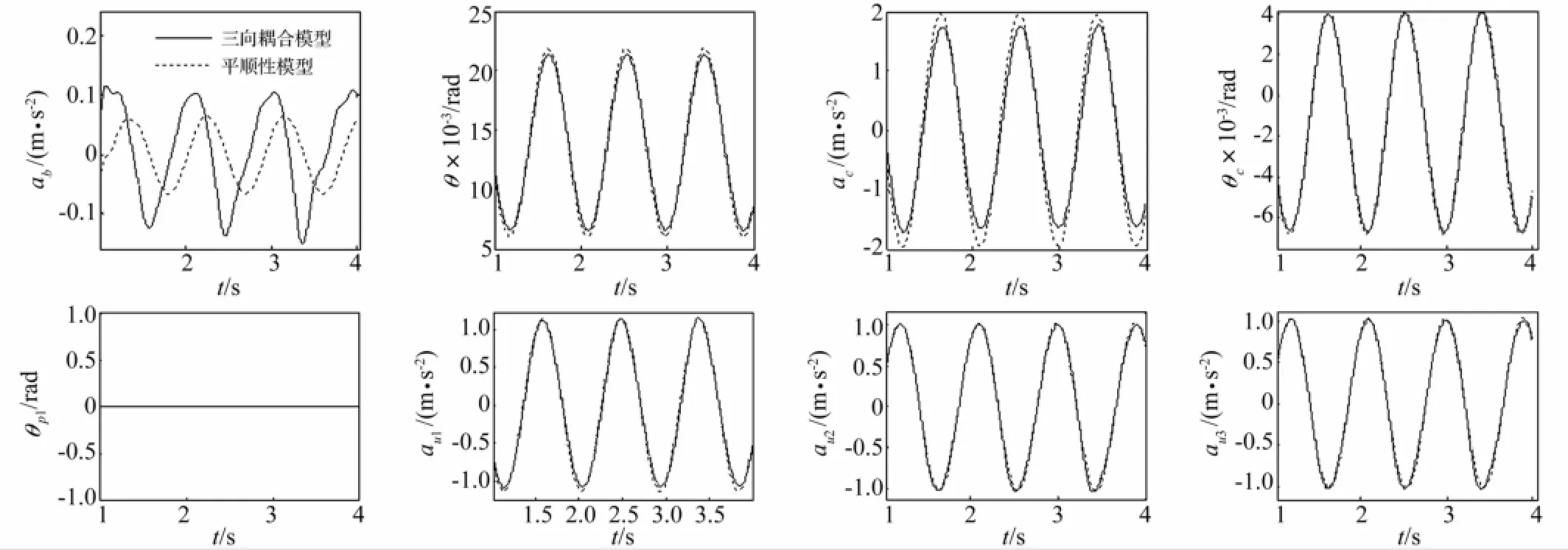
图6 三向耦合模型与平顺性模型的比较Fig.6 Compare of three-directional coupled model and ride comfortmodel
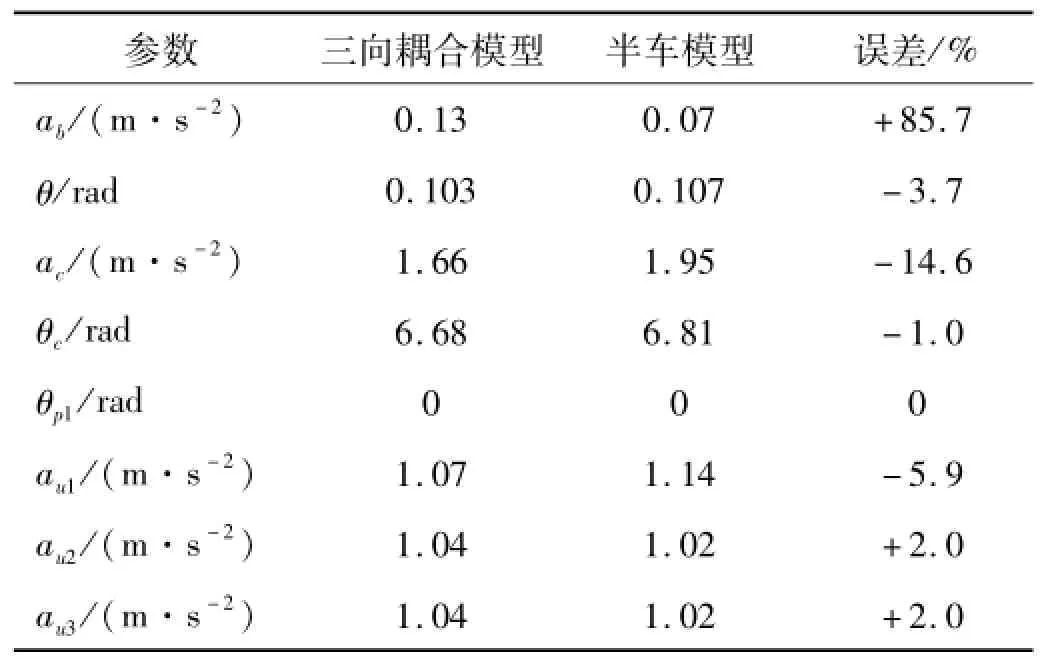
表1 三向耦合模型与半车模型响应幅值对比Tab.1 Response amplitude comparison of three-directional coup led model and half-vehiclemodel
分析图6、表1知,与半车模型相比,三向耦合模型计算所得车体加速度偏大,且存在相位超前;而垂向振动时三向耦合作用对车体影响最大,对驾驶室影响次之,对簧下质量影响最小;耦合作用对车体垂向振动影响大于对俯仰振动影响。
3.3 与虚拟样机模型比较
选相同汽车参数,利用ADAMS/Car软件建立东风载货汽车的虚拟样机(FVP)模型,包括前后悬架、转向系、车身、动力总成、驾驶室、制动系及车轮。轮胎力采用Fiala模型,轮胎参数取值同前。整车模型见图7。
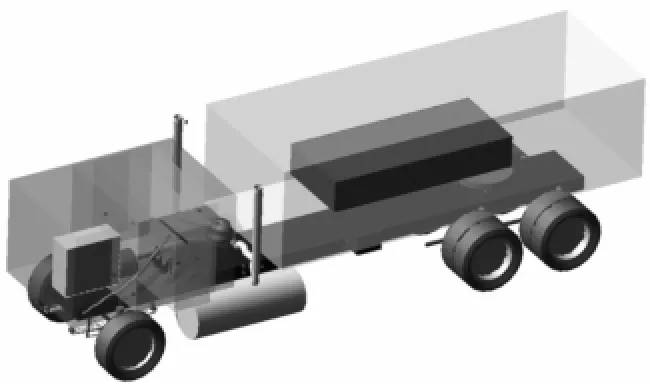
图7 重型汽车FVP模型Fig.7 FVPmodel of the heavy vehicle
以角阶跃工况为例,取初始车速50 km/h、积分步长1 ms,方向盘转角幅值181°,阶跃激励过渡时间0.01 s。计算汽车行驶轨迹、行驶速度、横摆角速度、侧向加速度、车体垂向加速度及车体侧倾角,见图8中虚线。为真实反映汽车实际运行状况,在三向耦合模型中考虑B级路面随机不平顺激励。该车传动比为21,将方向盘转角换算成前轮转向角为0.15 rad。利用三向耦合模型计算所得汽车响应见图8中实线。由图8看出,①三向耦合模型与FVP模型在数量级及趋势上较吻合,从而相互验证模型的有效性;②FVP模型仿真未考虑路面不平顺激励,因此所得横罢角速度、侧向加速度、车体垂向加速度及侧倾角均小于三向耦合模型,计算结果偏保守。路面越粗糙,两种模型差别越大。③FVP模型车速下降较快,对匀速行驶的模拟存在较大误差,而三向耦合模型可较好模拟汽车的匀速行驶状态。
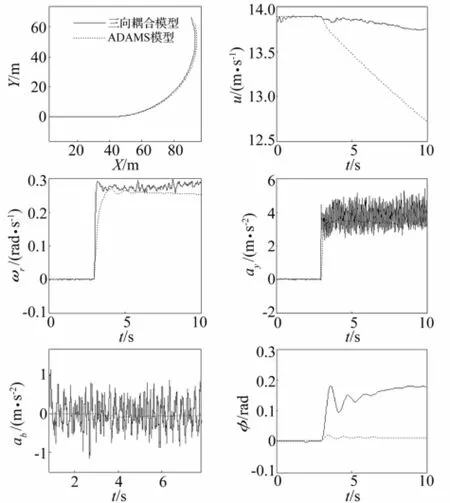
图8 三向耦合模型与FVP模型比较Fig.8 Compare of the three-directional coup led model and FVPmodel
3.4 与试验数据比较
据试验条件,选公路运输中较常见的满载、60 km/h匀速直线行驶工况进行现场试验。车辆为东风DFL1250A9载货汽车,在驾驶室座椅及6轴头上安装成都中科测控有限公司的TSC-D3型速度计。实验路面为干燥、纵坡不大于1%、不平度均匀无突变的B级路面。采用北京东方振动和噪声技术研究所INV360DF型智能采集处理分析仪将压电信号转换为数字信号。试验过程及测量装置见文献[18]。
利用三向耦合模型及FVP模型进行相同工况仿真。仿真与实测的垂向加速度时程曲线见图9、图10,各测点均方根值见表2。由于所建三向耦合模型未考虑发动机激励影响,故在对驾驶室加速度数据处理时滤去30 Hz以上信号。由图9、图10及表2看出,三向耦合模型计算结果与试验数据非常接近;除后轴外,三向耦合模型误差普遍小于FVP模型。因此,可初步验证三向耦合模型及仿真方法的正确性。
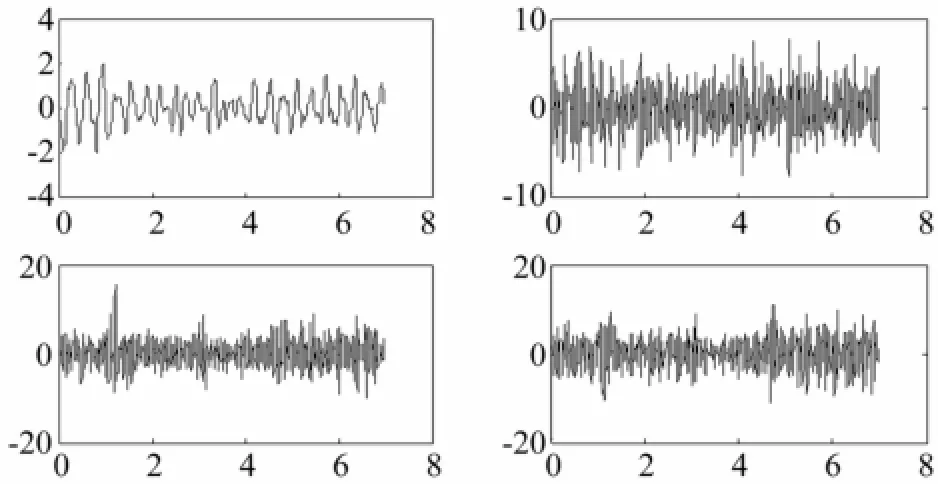
图9 现场试验数据Fig.9 Results of field test
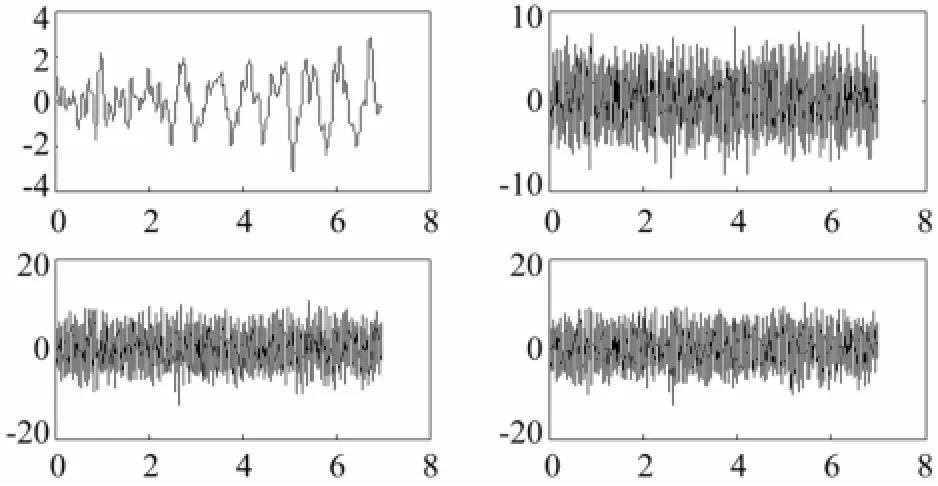
图10 三向耦合模型计算结果Fig.10 Simulation results of three-directional coupled model
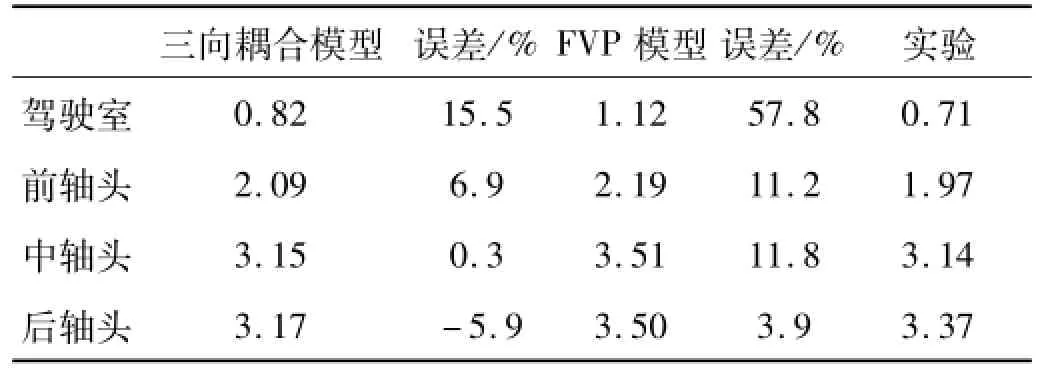
表2 实验与仿真加速度均方根值(m/s2)Tab.2 Root ofmean square value of accelerations obtained from test and simulation
4 结 论
本文推导考虑耦合作用后汽车各向加速度表达式,建立23自由度三向耦合重型汽车整车模型。通过与简单模型、FVP模型及实验数据比较,验证三向耦合模型的有效性;分析耦合作用对汽车响应影响。结论如下:
(1)该三向耦合模型与FVP模型相比涉及的参数少、计算效率高,较易进行整车复杂工况下动力学仿真,研究汽车的平顺性、操纵稳定性及制动性。
(2)汽车转向制动时,耦合作用对侧向加速度影响最大,对行驶轨迹、车速及横摆角速度影响较小。
(3)汽车匀速直线行驶时,耦合作用对车体垂向振动影响大于对俯仰振动影响;对车体垂向振动影响最大,对驾驶室影响次之,对簧下质量影响最小。
[1]Maruyama Y,Yamazaki F.Dynamic response of a vehicle modelwith six degrees-of-freedom under seismicmotion[C].Structural Safety and Reliability,Swets&Zeitlinger,2001.
[2]Watanabe K,Yamakawa J,Tanaka M.Turning characteristics of multi-axle vehicles[J].Journal of Terra Mchanics,2007,44:81-87.
[3]李以农,卢少波,郑玲,等.车辆弯道变速行驶时的纵横向耦合控制研究[J].系统仿真学报,2007,19(23):5524-5528.
LIYi-nong,LU Shao-bo,ZHENG Ling,et al.Study on lateral and longitudinal coupling controlwhen vehicle driving in crooked road with variable velocity[J].Journal of System Simulation,2007,19(23):5524-5528.
[4]徐娟,谭继锦,陈无畏.基于横向和垂向动力学的整车模型与仿真[J].农业机械学报,2005,36(9):9-12.
XU Juan,TAN Ji-jin,CHENWu-wei.Modelling and simulation of integrated car system for its lateral and vertical dynamics[J].Transactions of the Chinese Society for Agricultural Machinery,2005,36(9):9-12.
[5]KarbalaeiR,GhaffariA,KazemiR.A new intelligent strategy to integrated control of AFS/DYC based on fuzzy logic[J].International Journal ofMathematical,Physical and Engineering Sciences,2008,1(1):47-52.
[6]来飞,邓兆祥,董红亮,等.汽车主动悬架和四轮转向系统的综合控制[J].振动与冲击,2009,28(4):157-160.
LAIFei,DENG Zhao-xiang,DONG Hong-liang,et al.Integrated control of an active suspension and a four-wheel steering system for a vehicle[J].Journal of Vibration and Shock,2009,28(4):157-160.
[7]周景宇,文桂林,庄佳琪.爆胎汽车建模与仿真分析[J].机械科学与技术,2012,31(12):2003-2009.
ZHOU Jing-yu,WEN Gui-lin,ZHUANG Jia-qi.Modeling and simulation analysis of vehicle with blown-out tire[J].Mechanical Science and Technology,2012,31(12):2003-2009.
[8]Chou H,D'andréa-Novel B.Global vehicle control using differential braking torques and active suspension forcesmobility[J].Vehicle System Dynamics,2005,43(4):261-284.
[9]Poussot-Vassal C,Sename O,Dugard L.Attitude and handling improvements through gain-scheduled suspensions and brakes control[J].Control Engineering Practice,2011,19:252-263.
[10]郭孔辉.汽车操纵动力学原理[M].南京:江苏科学技术出版社,2011.
[11]王威,李瑰贤,宋玉玲.汽车转弯高维非线性动力学特性研究[J].哈尔滨工程大学学报,2009,30(6):676-685.
WANGWei,LIGui-xian,SONG Yu-ling.High-dimensional nonlinear vehicular turning dynamics[J].Journal of Harbin Engineering University,2009,30(6):676-685.
[12]卢少波,李以农,郑玲.基于制动与悬架系统的车辆主动侧翻控制的研究[J].汽车工程,2011,33(8):669-675.
LU Shao-bo,LI Yi-nong,ZHENG Ling.A study on vehicle active rollover control based on braking and suspension systems[J].Automotive Engineering,2011,33(8):669-675.
[13]Ieluzzi M,Turco P,Montiglio M.Development of a heavy truck semi-active suspension control[J].Control Engineering Practice,2006,14(3):305-312.
[14]余志生.汽车理论(第5版)[M].北京:机械工业出版社,2009.
[15]Gim G,Nikravesh P E.A three dimensional tire model for steady-state simulations of vehicles[J].SAE,1993,102(2):150-159.
[16]ZhaiW M.Two simple fast integrationmethods for large-scale dynamic problems in engineering[J].International Journal for NumericalMethods in Engineering,1996,39(24):4199-4214.
[17]Li Shao-hua,Yang Shao-pu,Chen Na.Directional control of a driver-heavy-vehicle closed-loop system[J].Advanced Engineering Forum,2012,2/3:33-38.
[18]杨绍普,陈立群,李韶华.车辆-道路耦合系统动力学研究[M].北京:科学出版社,2012.
Modeling and dynam ic analysis of a non-linear heavy vehicle with three-directional coupled m otions
LIShao-hua1,YANG Shao-pu1,CHEN Li-qun2
(1.School of Mechanical Engineering,Shijiazhuang Tiedao University,Shijiazhuang 050043,China;2.Department of Mechanics,Shanghai University,Shanghai200444,China)
The coupling relationships of vehicle motions in different directions were analyzed.A heavy vehicle model of 23-DOF with coupled three directional motions was built and the equations of motion of the vehicle were deduced.The nonlinear tire forces in different directionswere calculated by using the nonlinear Gim model together with the vertical single dot contactmodel.Six one-order ordinary differential equations were deduced to calculate the wheel rotating speed at real time and to get the slip ratios.Under the turning-braking combined condition,the uniform straight running condition and the steering wheel angle step condition,the dynamic responses of the vehicle were simulated respectively by numerical integration.The validity of the new vehicle model was verified by comparing the dynamic responses calculated with these by the traditional handling and stability model,the traditional ride comfortmodel,the functional virtual prototypingmodel and test data.The effects of coupling action on vehicle responses were also analyzed.The results show that the proposed three-directional coupled model is suitable to investigate simultaneously the ride comfort,handling stability and brake properties of vehicles in complicated driving conditions.
three-directional coupling;heavy vehicle;modeling;nonlinear tire force;full vehicle dynamics
U461.2
:A
10.13465/j.cnki.jvs.2014.22.024
国家自然科学基金(11072159);河北省自然科学基金(E201221002);教育部新世纪人才支持计划(NCET-13-0913)
2013-08-15 修改稿收到日期:2013-11-21
李韶华女,博士,教授,1973年生