具有马氏跳变参数的不确定广义时滞系统的稳定性分析
2014-05-25程树华
程树华
(浙江理工大学机械与自动控制学院自动化研究所,杭州310018)
具有马氏跳变参数的不确定广义时滞系统的稳定性分析
程树华
(浙江理工大学机械与自动控制学院自动化研究所,杭州310018)
采用时滞分割法研究了一类具有马氏跳变参数的不确定广义时滞系统的稳定性分析问题,针对状态转移矩阵的转移率为部分未知的情况,得到了时滞区间n0等分下的线性矩阵不等式(LMI)形式的递推公式,并给出了一组稳定性判据。数值实例表明本方法具有有效性和一定的优越性。
时滞分割法;转移率部分未知;马氏跳变参数;广义时滞系统;线性矩阵不等式(LMI)
0 引 言
广义时滞系统[1-3]获得广泛研究,时滞分割法是处理时滞有效方法[4-5]。由于外部随机扰动和系统部件损坏,系统结构会发生改变。马氏跳变模型是一种描述上述状况的有效模型。大多数关于马氏跳变系统文献都假设跳变的转移率完全已知[6-7],基于这种假设提出的跳变理论在实际应用中受到了限制。然而,获得转移率全部信息并不是一件容易的事情,甚至会为之付出高昂代价。在实际应用中,具有马氏跳变参数的不确定广义时滞系统广泛存在于网络系统、大型电力系统、生物系统等中,这为其实际应用提供了广阔土壤;理论上,具有马氏跳变参数的不确定广义时滞系统又是一个复杂系统研究的重要方向。
本文研究具有马氏跳变参数的不确定广义时滞系统在转移矩阵转移率部分未知情形的稳定性条件。针对转移率部分未知的情况,基于时滞分割法,得到了时滞区间等分下的线性矩阵不等式(LMI)形式的时滞相关有界实引理的递推公式。在此基础上,得到了转移率完全已知时的稳定性分析判据的推论形式。数值实例结果表明,时滞区间越细分,结果保守性就越低。
1 问题描述

考察如下具有马氏跳变参数的不确定广义时变时滞系统:对于每一个rt=i,i∈Ω,我们记作:A(t,i)=Ai+ ΔAi(t),Ad(t,i)=Adi+ΔAdi(t)。其中,Ai、Adi是已知的实数矩阵;ΔAi(t)、ΔAdi(t)是未知的实数矩阵且假设其具有如下形式:其中,x(t)∈Rn为系统状态向量;rt是在t时刻的马氏跳变参数;每一个rt、A(rt)、Ad(rt)是具有适当维数的实常数矩阵,E∈Rn×n且0<rank(E)≤n。{rt,t≥0}是一个在Ω={1,2,…,Nm}上取值的连续时间马氏过程,采用如下定义:


马氏链的转移率是部分未知的情形,即转移概率矩阵∏的部分元素是未知的,用符号表示为:

3)如果系统(1)是正则、无脉冲且随机稳定的,则其是随机容许的。
引理1[5]对任意实矩阵X∈Rn×n,X=XT>0,实数r>0,以及使如下的积分有意义的向量函数:[-r,0]→Rn,则:,其中,
在系统(1)中,d(t)表示在模式rt下的时变时滞,且满足:0<d(t)<¯d<∞,˙d(t)≤μ。
定义1:
1)对于一个给定的d>0,具有马氏跳变参数的不确定广义时滞系统(1)是正则、无脉冲的,当任意时滞d(t)满足0<d(t)≤¯d<∞,如果矩阵对(E,A(t,rt))是正则和无脉冲的,rt∈Ω。
2)系统(1)是随机稳定的,如果对于有限初始条件x(t)=φ(t),t∈-¯d,0和已知初始分布的初始模式r(0)∈Ω,存在一个标量M(x0,r0)满足如下条件:

引理2 对给定的对称矩阵Θ、M、N是具有适当维数的矩阵,矩阵不等式

对于任意的F(t)满足FT(t)F(T)≤I成立。当且仅当存在一个常数ε>0,满足:

2 主要结果
把时滞区间 0,¯d 均分成n0(n0≥2)份,即:,基于这种时滞分割的思想,得到本文主要结果。
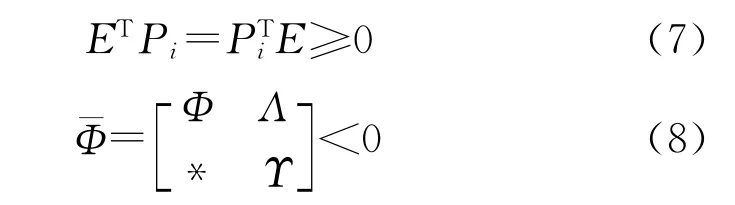
定理1 系统(1)是随机容许的,如果存在正定矩阵Pi>0,R>0,Z(1,2,…,n0)>0,

满足如下LMI:


其中,

证明:先证明系统(1)是正则、无脉冲的。
由于rank(E)=r≤n,必存在可逆矩阵G∈Rn×n和H∈Rn×n,使得,

同时,有:

根据(3),~P12i=0,对于每个i∈Ω。由式(4)知:

据此可知:对于任意的i∈Ω,~A22i和~P22i是非奇异的。从而可知矩阵对(E,Ai)是正则、无脉冲的,根据引理2可知(E,A(t,rt))是正则无脉冲的。根据定义1系统(1)是正则、无脉冲的。
其次证明系统(1)是随机稳定的。选择如下Lyapunov-Krasovskii函数:

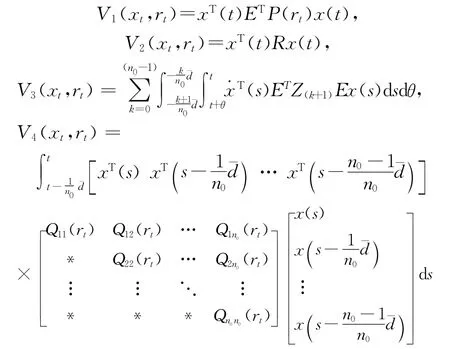
其中,用HT和H,分别左乘、右乘上式得
取L为最小增量,则:

令

则对于任意i∈Ω,有:

因此,必然存在一个正数ξ,使得

又由Dynkin's formula,对于每一个rt=i,i∈Ω,t>0,

则根据定义1,系统(1)在转移率部分已知的情形下是随机稳定的,从而是随机容许的,证毕。
推论1 具有马氏跳变参数的不确定广义时变时滞连续系统(1)在转移率完全已知的情况下是随机容许的,如果存在正定矩阵P(i)>0,R>0,

满足如下LMI:
其中,Λij(i=1,2,…(n0+7);j=1,2,3,4)
按如下确定:
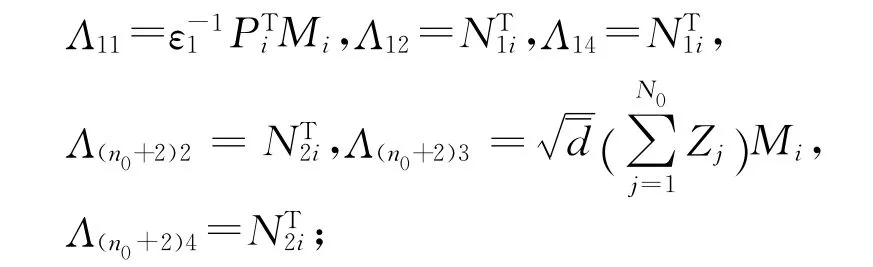
γij(i=1,2,3,4;j=1,2,3,4)按如下确定:

其余元素均为零,“*”表示对应元素的转置。
证明:根据定理2,即可证明。
3 数值实例
例1 考虑如下转移率完全已知的具有马氏跳变参数的不确定广义时变时滞系统(1)。系统各参数如下:

表1是文献[7]和本文的推论1所提供的方法对比结果。结果显示推论1的情况比文献[7]具有更低的保守性。

表1 不同μ的时滞的最大允许值对比
例2 考虑转移率部分已知的具有马氏跳变参数的不确定广义时变时滞系统(1),Ω={1,2,3}

表2是本文的定理1所提供的方法分别在μ= 0,n0=1,2,3,4下的对比结果。结果显示,时滞区间分割的越细,保守性就越低,这说明了本文方法优越性和有效性。
表2 时滞的最大允许值对比

表2 时滞的最大允许值对比
n01 2 3 4 ¯d 0.304 0.670 8 1.276 2.465
4 结 论
本研究基于时滞分割法研究了一类具有马氏跳变参数的不确定广义时变时滞连续系统的稳定性分析。实验结果显示本文方法对于消除保守性是非常出色的,说明了本方法的有效性和优越性。
[1]Nilsson J,Bernhardsson B,Wittenmark B.Stochastic analysis and control of real-time systems with random time delays[J].Automatica,1998,34(1):57-64.
[2]Haidar A,Boukas E K.Robust stability criteria for Markovian jump singular systems with time-varying delays[C]//The 47th IEEE Conference on Decision and Control Cancun:IEEE,2008,4657-4662.
[3]Tang B,Liu G H,Gui W H.Improvement of state feedback controller design for networked control systems[J].IEEE Transactions on Circuits and Systems,Part II:Express Briefs,2008,55(5):464-468.
[4]Yu JJ,Tan J,Jiang H B,et al.Dynamic output feedback control for Markovian jump systems with time-varying delays[J].IET Control Theory and Applications,2012,6(6):803-812.
[5]Wang JR,Wang H J,Xue A K,et al.Delay-dependent H∞control for singular Markovian jump systems with time delay[J].Nonlinear Analysis:Hybrid Systems,2013,8(5):1-12.
[6]Liu L J,Gao H L.Delay-dependent H∞control for singular Markovian jump time-delay systems[C].The 2nd International Conference on Intelligent Control and Information Processing,Harbin:IEEE,2011:946-951.
[7]Wu Z G,Su H Y,Chu J.Robust exponential stability of uncertain singular Markovian jump time-delay systems[J]. Acta Automatica Sinica,2010,36(4):443-461.
Stability Analysis of Uncertain Generalized Time Delay System with Markovian Jumping Parameters
CHENGShu-hua
(Institute of Automation,School of Mechanical Engineering&Automation,Zhejiang Sci-Tech University,Hangzhou 310018,China)
This paper studies the problem of stability analysis of uncertain generalized time delay system with Markovian jumping parameters with delay decomposition approach,obtains the recursion formula of linear matrix inequality(LMI)form under n0equal division of time delay interval in allusion to partially unknown transfer rate of state transition matrix and gives a group of stability criteria.Numerical examples show that this method has effectiveness and certain superiority.
delay decomposition approach;partially unknown transfer rate;Markovian jumping parameters;generalized time delay system;linear matrix inequality(LMI)
TP13
A
(责任编辑:康 锋)
1673-3851(2014)03-0272-04
2013-09-04
国家自然科学基金(61104094)
程树华(1984-),男,河南新蔡人,硕士研究生,主要研究方向为复杂系统建模与控制。
