机载多普勒变化率的相差检测
2014-05-25郁涛
郁 涛
(中电科技集团第五十一所,上海 201802)
机载多普勒变化率的相差检测
郁 涛
(中电科技集团第五十一所,上海 201802)
在现有相差检测机载平台相对角速度的基础上,进一步给出了通过相差检测获得机载多普勒变化率的方法。和基于数字接收机信号处理的获取方法不同,基于短基线相差测量的多普勒变化率检测方法的最大特点是多普勒变化率可以被实时获取,且只要基线足够长,就能将检测多普勒变化率的测量误差控制在几赫兹之内。
多普勒;相差测量;角速度;机载无源定位
0 引言
多普勒频率变化率反映了运动目标相对于观测站的径向加速度信息,获取多普勒变化率对于目标的定位和运动状态的估计具有非常重要的意义。但多普勒变化率非常微弱,尤其是对于雷达脉冲信号,由于脉冲持续时间一般都较短,在信噪比和采样点数一定时,用单个脉冲实现高精度测量是非常困难的。
近年来所提出的检测多普勒变化率的一种主要方法是在数字接收机中应用数字信号处理技术,利用脉冲载频之间的相参特性,使多个脉冲形成一个连续信号,由此等效延拓信号的有效观测时间,并基于相位差分的最小二乘算法获得较高的测量精度[1,2]。但此类方法要求有较高的信噪比条件,并必须保证相位的测量不出现模糊。
和采用数字信号处理方法不同,本文探讨了一种直接利用短基线阵列的相差测量技术来检测多普勒变化率的方法,理论分析表明,如能采用较长的基线,则对多普勒变化率的测量误差即可被控制在几赫兹之内。
1 相差近似测向
对于图1所示的单基线相位干涉仪,如对应于每个径向距离为ri,鉴相单元所测得的相位为φi,则有

于是,两阵元之间的两径向距离的程差就完全可以由相差测量所确定,且即能得到在形式上与时差定位方程完全类似的相差定位方程:

假设来自同一辐射源的入射到两天线的信号近似为平面波,则由三角正弦定理,即可近似得到现有的相位干涉测向公式:

式中:Δn=ni-nj为相位差的波长整周数;Δφ=φi -φj为两阵元之间的相位差;d为阵元间的距离。
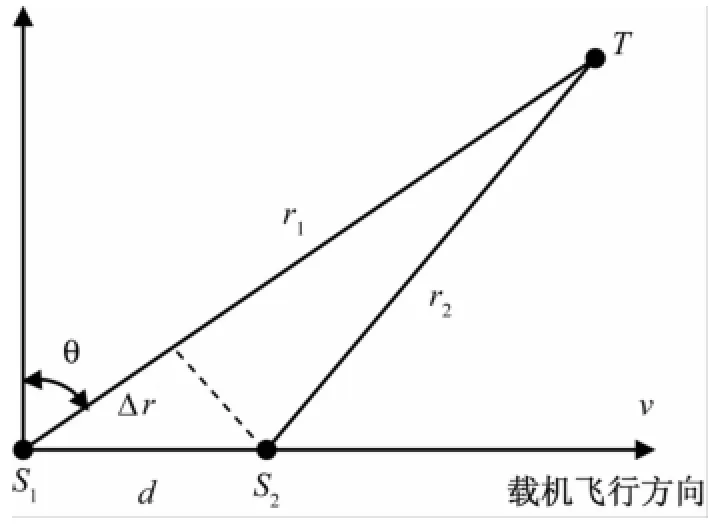
图1 单基线相位干涉阵列
2 频移变化率的相差检测
对多普勒频移表示式:

在其两边微分,可得

根据文献[3]的分析,基于相移与频移之间的函数关系[4],利用微分和等效变换,可导出在机载平台上仅基于相差检测的相对角速度为

将相对角速度和相差近似测向式代入多普勒变化率表示式后得

3 模拟计算
基于图2所示的几何关系,先预设中间阵元的径向距离为r2,阵元间距为d,并以图2所示一维阵列最左面的阵元为到达角的测量起始基准,使到达角θ在规定的区间内线性变化。随后,利用三角函数依次解出其余的径向距离和前置角。
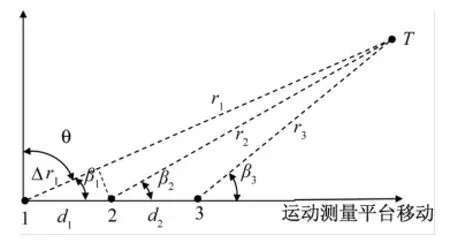
图2 机载一维双基线多普勒-相位干涉阵列
按下式计算出多普勒变化率的理论值为

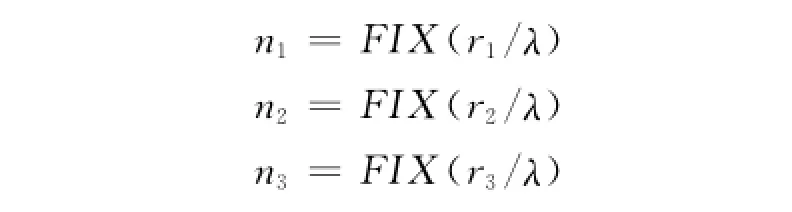
用向零方向取整函数求得各个径向距离的波长整周数为
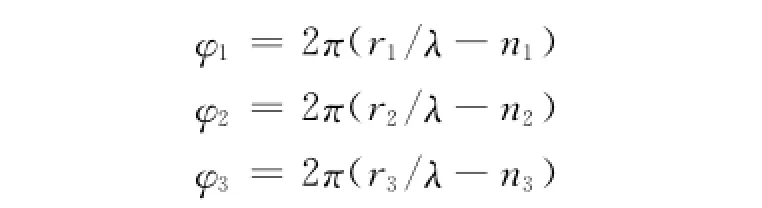
解出数值小于π的相移理论值:
将ni和φi的理论计算值代入式(7)解出多普勒变化率的测算值,并将测算值和理论值(8)进行比较,可给出基于相位检测的多普勒变化率的准确性:

式中:下标a表示按式(7)得到的测算值。
图3给出了当到达角在[0°,90°]范围内线性变化时,对于不同的基线长度,机载运动平台的多普勒变化率的计算误差曲线。从公式以及图中曲线可见,相对计算误差是和基线成反比的。模拟计算表明,相对计算误差与速度的改变基本无关,但与波长的改变成反比,与径向距离的变化成正比。计算所用的相关参数已在图3中标注。
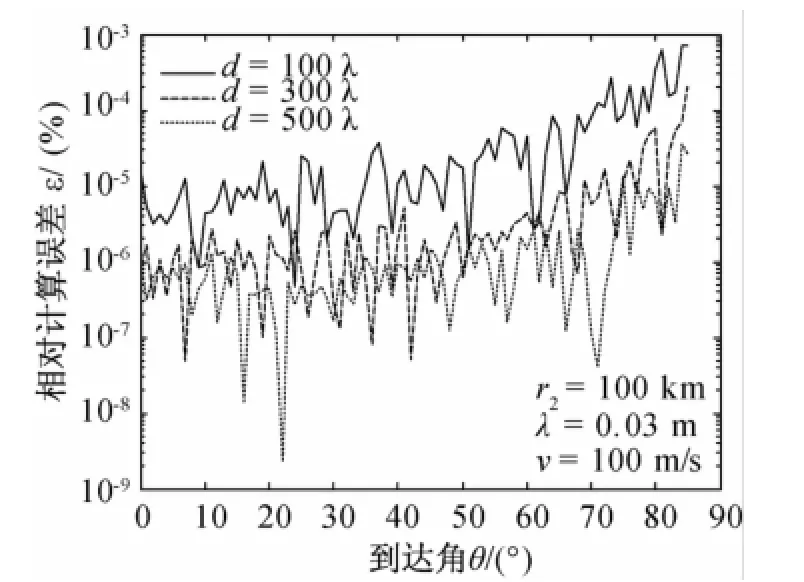
图3 不同基线长度时多普勒变化率的相对计算误差
4 误差分析
根据误差估计理论,由相位差和速度所产生的多普勒变化率测量误差为

式中:σv为速度测量误差的均方根值,分析计算时取σv=0.1 m/s;σφ为相位差测量误差的均方根值,单位为弧度,且一般工程测量可达到σφ= π/90。
从测量误差表示式可知,测量误差是与机载平台的移动成正比,与基线长度成反比,显然,为降低测量误差就必须增大基线长度。图4给出了在不同基线长度时的多普勒变化率测量误差。从中可看到,约在基线与波长的比值大于500之后,多普勒变化率的测量误差可降低至几个赫兹。仿真计算时所采用的参数已在图4中标示。
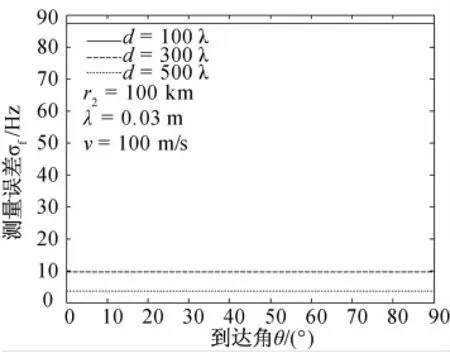
图4 不同基线时的多普勒变化率测量误差
5 结语
本文所给出的纯理论分析表明,基于短基线相差测量技术,只要基线足够长,就能将检测多普勒变化率的测量误差控制在几赫兹之内。并且,和基于数字接收机信号处理的获取方法不同,基于短基线相差测量的多普勒变化率检测方法的最大特点是多普勒变化率可以被实时获取。
[1]王军虎,邓新蒲.相参脉冲信号多普勒变化率测量方法[J].航天电子对抗,2005,21(2):41-43,50.
[2]冯道旺,周一宇,李宗华.相参脉冲序列多普勒变化率的一种快速高精度测量[J].信号处理,2004, 20(1):40-43.
[3]郁涛.机载平台相对角速度的相移检测法[J].天线学报,2012,1(1):18-21.
[4]T.Yu,Airborne Passive Localization Method Based on Doppler-phase Interference Measurement[M].I.Padron,Ed.,Recent Interferometry Applications in Topography and Astronomy,InTech Publisher,Rijeka,2012:133-168.
Doppler Rate Detection by Measuring Phase-difference on Airborne Platform
YU Tao
(51st Research Institute of CETC,Shanghai 201802,China)
On the available basis of the relative angular velocity obtained by measuring phase difference on airborne platform,this paper presents a method obtaining Doppler rate by measuring phase difference.In contrast to the method based on digital signal receiver the maximal characteristic of Doppler rate detected by measuring phase difference based on short baseline array is that Doppler rate can be in time obtained.Also,as long as the baseline is long enough,the measuring error detecting Doppler rate can be controlled within a few hertz.
Doppler;phase difference measurement;angular velocity;passive location
TN911.7
A
1671-0576(2014)01-0041-03
2013-08-05
郁涛(1957-),硕士,高工,主要从事无线电定位技术研究。
