基于鱼雷导引弹道的目标回声特性研究
2014-05-17邓伟,范军
邓 伟,范 军
(1. 上海交通大学海洋工程国家重点实验室,上海 200240;2. 91388部队,广东湛江 524022)
0 引 言
声波是目前水下目标特性获取的主要物理场。尤立克[1]在“水声原理”中给出了若干简单刚性几何体的目标强度计算公式。水下复杂目标的声散射问题常用数值方法来求解,国内外先后出现了有关复杂目标回波特性理论计算研究成果。90年代早期,美国的GAUTAM SENGUPA[2]等人完成了声散射数值仿真软件TRANAIR,英国FNC公司开发的SIGNATURE软件中的 TESAC模块能对水下大型潜器、鱼雷、水雷的目标强度进行精确预报。国内上海交通大学范军和汤渭霖基于 Kirchhoff近似建立了板块元计算方法[3-8],对水中刚性表面目标强度实现了精确快速预报。李建鲁等[9]对近远场过渡声散射特性进行了研究。
目标强度是鱼雷获取目标回声特性最重要参数之一,它在鱼雷捕获、追踪、识别目标过程中起着重要的作用。在声呐方程中通常认为目标强度是固定值,前提是目标处在远场中被入射波束全部照射。然而,鱼雷在追踪目标过程中经常处在近场范围内,因此鱼雷波束照射到的目标表面也随之变化,鱼雷自导系统接收到的目标强度并非固定值。这时目标强度失去意义,声呐方程中起作用的是局部的回声强度[9]。因此,基于鱼雷自导条件下运动目标回声强度起伏研究在实战中具有重要意义。本文通过建立标准的Benchmark水下大型潜器模型,将板块元方法应用到鱼雷几种典型的导引弹道(鱼雷尾追法、固定提前角导引法、平行接近法)中,对水下运动复杂目标回声特性进行预报。
1 原理方法
对于目标静止条件下的回声特性有了比较系统的研究。实际情况下目标并非静止不动,鱼雷载体受携带能量的限制,鱼雷通过波束扫描对目标进行探测和跟踪,发射波束具有一定开角,当两者处于近距离时,鱼雷发射波束只能照射目标的一部分,如图1所示。针对鱼雷末段运动规律,建立了如图1所示鱼雷与目标运动坐标系。把坐标系原点O建立在目标模型的几何中心。首先,根据两者的运动关系仿真得到鱼雷追踪目标过程中各个时间点的坐标值。其次,应用板块元方法求解各个坐标值下鱼雷波束照射目标表面区域。最后,换算成目标强度。板块元方法可以参考文献[6]。
图1 鱼雷与目标运动关系Fig.1 Motion relationship between the torpedo and the target
采用板块元方法计算目标回声强度的关键是对目标进行精确的几何建模,建模的精度直接影响计算结果。本文采用三维建模软件UG建立了标准的Benchmark水下大型潜器模型,通过ANSYS软件进行了网格划分,图2是目标局部表面网格划分示意图。

图2 目标表面网格Fig.2 Target surface meshes
目标强度TS是一个远场声呐参数,鱼雷攻击目标时从远场过渡到近场,在远场中TS与回声强度ES等同,近场中TS无定义,而ES仍存在,因此用ES描述目标的近场特性。ES值不仅取决于目标特性,而且还取决于目标中心的选取和接收点中心和发射点中心距离,可表示为:

其中:pi是入射波在目标中心点的声压;ps是接收点的声压;r0是从中心点到接收点的距离。在收-发合置情况下计算回声声压的物理声学或 Kirchhoff近似为

其中:r是目标上一点的距离;θ是r与表面法线的夹角;入射波声压pi=(Ar) exp ( ikr),A是幅值。式(2)既适用于远场也适用于近场。当目标处在近场时,把目标划分为足够小的小板块,保证相对于每一个小板块,接收器处在远场。而且在同一板块内r近似为常数,可以移出积分号外,得到其中,Δrij是第ij号板块与参考点的距离。将各板块元的散射声压叠加就合成整个目标的散射声压:


这样式(2)中的积分又可以用板块元法计算。
具体的几何关系见图3,O1O为鱼雷波束发射点与目标几何中心连线,也是鱼雷波束中轴;α为鱼雷半波束开角;O1O2为鱼雷波束发射中心到小板块中心连线;n,n1分别为O1O和O1O2两线向量;βi,j为n和n1两向量之间的夹角;虚线圆圈为鱼雷波束(为了计算简便,鱼雷波束被简化为圆锥型)照射区域面元积分I。设定鱼雷与目标在同一水平面XOZ内运动,假如鱼雷波束照射目标表面划分为N×M个面元。如图3所示,ΔABC为鱼雷波束照射的一个面元,对于刚性目标表面发射系数V(θ)=1。每个面元中心点和鱼雷波束发射点的连线与波束中轴之间的夹角为βi,j,满足:

图3 应用于鱼雷导引弹道的板块元方法Fig.3 The plate element method for torpedo guidance trajectory
2 算法检验
鱼雷在探测、发现、追踪直到最后攻击目标过程中两者的距离时刻在变化,声场将会从远场过渡到近场。简单的刚性球目标强度具有精确的数值解。下面对刚性球在运动情况下的目标回声强度进行预报和验证。
2.1 典型目标建模
用三维建模软件UG建立了一个典型的刚性球模型,球半径r=1.0 m,刚性球表面网格划分如图4所示。
图4 刚性球Fig.4 Rigid sphere
2.2 刚性球目标回声强度Rayleigh简正级数解
刚性球在边界条件r=a、收发合置的情况下,r=r0,θ=π,其Rayleigh简正级数解[6]表示为

图5是刚性球在距离一定的条件下,入射声波的频率变化,分别采用板块元方法和Rayleigh简正级数解法计算结果。图6是刚性球在保持频率一定的条件下,按照尾追法导引弹道变化规律,距离从800 m运动到 10 m处,分别采用板块元方法和Rayleigh简正级数解法计算结果。

图5 刚性球强度随频率的变化Fig.5 Echo strength variation of rigid sphere with frequency change
从图5可以看出由于两者相对运动时目标回声强度随频率的变化。通过仿真结果图分析可以得出:当频率大于2 kHz时,运动目标远场目标强度值与近场ES近似。图6反映了刚性球目标由远到近的过渡特性,过渡值为50 m左右。对于鱼雷攻击末段,由于距离变化所引起的目标回波强度剧烈起伏对鱼雷的影响不大,因为这个距离内鱼雷已经锁定了目标。
图6 刚性球强度随距离的变化Fig.6 Echo strength variation of rigid sphere with distance change
通过对上述的仿真分析,可以证明此方法对于预报运动目标回声强度是可行的,而且具有相当高的精度,在此基础上推广到计算水下复杂目标,对目标回声强度进行预报。
3 鱼雷导引弹道下运动目标回声强度的计算
3.1 尾追法目标回声强度计算
假定鱼雷与目标处于同一深度,鱼雷提前角为ηT=0,鱼雷波束开角为2α=60°,目标舷角为ϕt=0°。水下目标作水平直线运动,鱼雷采用尾追法追击水下大型潜器运动目标,两者相对运动关系仿真如图7所示。回声强度的仿真结果如图8所示。
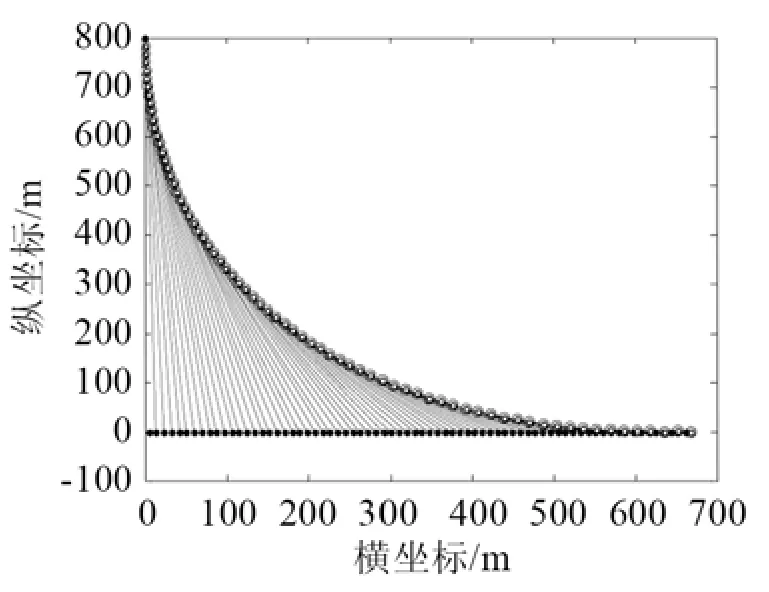
图7 鱼雷尾追法Fig.7 Torpedo stern chasing method
通过对图8的分析,可以得出以下结论:
鱼雷尾追法弹道下,当鱼雷波束开角设定在60°时,随着两者距离的接近,目标回声强度趋于变小,起伏剧烈。
3.2 固定提前角法目标回声强度计算

图8 鱼雷尾追法目标回声强度Fig.8 Echo strength from torpedo stern chasing method
固定提前角导引法时,鱼雷提前角Tη=常数,又称为常值提前角导引法。采用这种导引方法时,鱼雷在接近目标的过程中鱼雷速度与瞄准线之间的夹角始终保持不变,其运动关系如图9所示。图10是鱼雷提前角设定在Tη=5°,鱼雷波束开角2α=60°时的仿真结果。针对鱼雷提前角变化做了如下几种工况仿真。工况1:目标初始坐标(0, 0),鱼雷初始坐标(0, 800),提前角5°;工况2:目标初始坐标(0, 0),鱼雷初始坐标(0, 800),提前角15°;工况3:目标初始坐标(0, 0),鱼雷初始坐标(0, 800),提前角30°;工况4:目标初始坐标(0,0),鱼雷初始坐标(0, 800),提前角40°。图10~12为固定提前角法工况1和2的目标回声强度及其对比;图13为工况1~3时鱼雷攻击潜艇轨迹;图14为工况1、3时的目标回波强度。
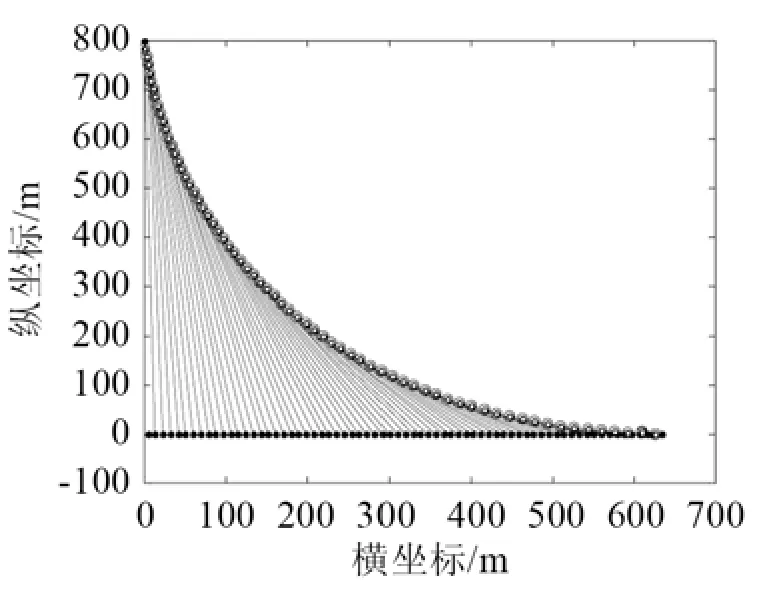
图9 工况1鱼雷攻击潜艇轨迹(固定提前角法)Fig.9 Track of torpedo attacking submarine in case 1 (advance angle fixing method)
通过上述理论计算仿真和对比分析,可以得出以下结论:
(1) 鱼雷在固定提前角导引弹道下攻击水下大型潜器运动目标时,随着两者距离的接近,目标回声强度趋于变小,起伏剧烈。
(2) 从图12可知,提前角小于鱼雷波束开角的情况下运动目标回声强度大小与提前角大小关系不大;从图14可知,提前角为30°时,目标强度要比提前角为5°时小5 dB左右。说明鱼雷在采用固定提前角导引时,提前角受临界角限制。当鱼雷波束开角超出临界角时,运动目标回声强度随着提前角的增大相应变小。提前角大于临界角时,鱼雷运动到一定距离时,其波束开角只能照射目标一部分。

图10 工况1目标回声强度(固定提前角法)Fig.10 Echo strength in case 1 (advance angle fixing method)

图11 工况2目标回声强度(固定提前角法)Fig.11 Echo strength in case 2 (advance angle fixing method)
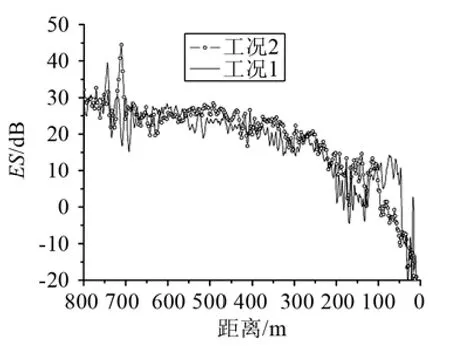
图12 工况1和工况2目标回声强度(固定提前角法)Fig.12 Echo strengths in case 1 and case 2 (advance angle fixing method)
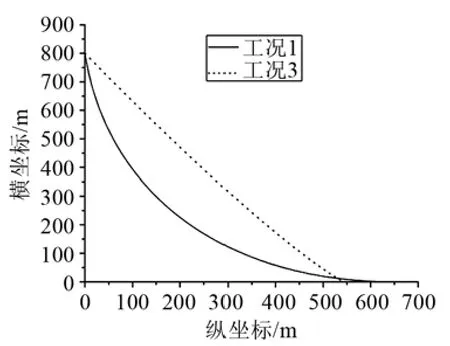
图13 工况1和工况3轨迹(固定提前角法)Fig.13 Tracks in case 1 and case 3 (advance angle fixing method)
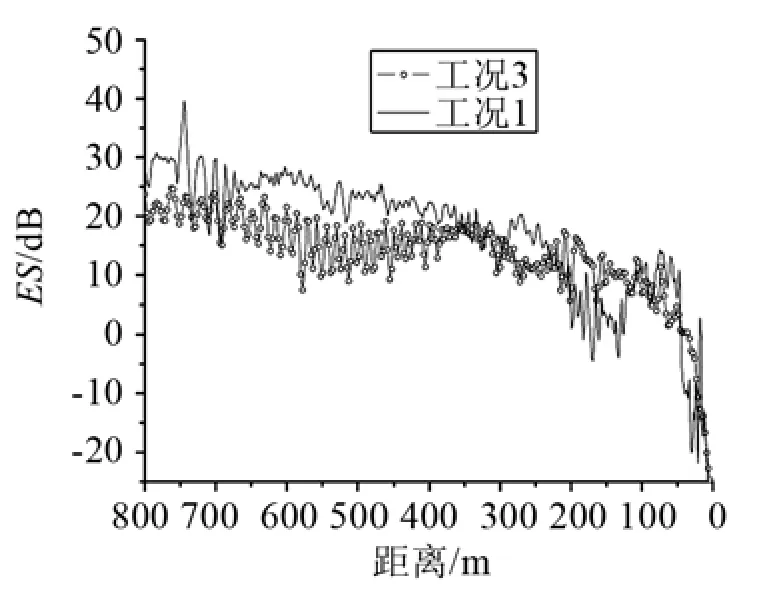
图14 工况1和工况3目标回声强度(固定提前角法)Fig.14 Echo strengths in case 1 and case 3 (advance angle fixing method)
3.3 平行接近法目标回声强度计算
平行接近法是变提前角导引方法的一种。当鱼雷采用平行接近法导引时,鱼雷在接近目标过程中,鱼雷与目标之间的连线始终平行,鱼雷的航向总是瞄准与鱼雷即将相遇的点,当目标作直线运动时,鱼雷弹道轨迹是一直线,其运动轨迹如图15所示。仿真过程中目标初始坐标设置两种工况。工况1:目标初始坐标(100, 0),鱼雷初始坐标(0, 800),鱼雷波束开角100°;工况2:目标初始坐标(300, 0),鱼雷初始坐标(0, 800),鱼雷波束开角100°;工况3:目标初始坐标(300, 0),鱼雷初始坐标(0, 800),鱼雷波束开角60°。图16、17是采用平行接近法时工况2的目标回声强度及与工况1的对比。图18是工况3下的目标回波强度。
通过以上理论计算仿真,可以得出以下结论:
(1) 目标相距鱼雷较远的情况下,平行接近法下获取的目标强度较有利,从图17可见相距较远的工况2目标强度较工况1目标强度大5 dB左右。
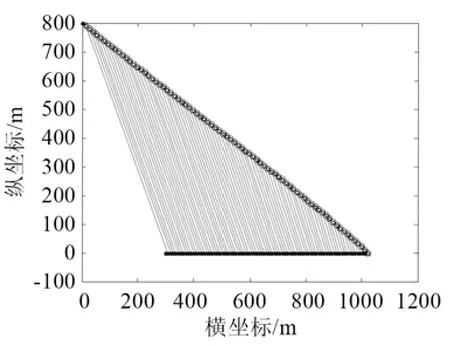
图15 鱼雷攻击目标轨迹(平行接近法)Fig.15 Track of torpedo attacking submarine (parallel approaching method)
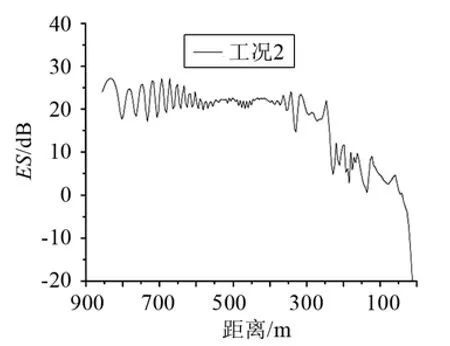
图16 工况2目标回声强度(平行接近法)Fig.16 Echo strength in case 2 (parallel approaching method)

图17 工况1和工况2目标回声强度(平行接近法)Fig.17 Echo strengths in case 1 and case 2 (parallel approaching method)

图18 工况3目标回声强度(平行接近法)Fig.18 Echo strength in case 3 (parallel approaching method)
(2) 在鱼雷波束开角较大情况下采用平行接近法获取目标回声强度更有利。如图18中工况3,由于鱼雷波束开角小,鱼雷从初始位置追击距目标距离378 m后鱼雷波束无法照射到运动目标,造成目标丢失,这样一来就会造成鱼雷进入搜索阶段,消耗鱼雷的有效航程。
4 结 论
本文把板块元方法从计算静止目标回声强度推广到运动目标。模拟了实战背景条件下鱼雷导引弹道运动轨迹和目标回声强度的预报。
通过对仿真结果进行分析,实战背景条件下鱼雷攻击过程中接收到的目标回声强度起伏剧烈。随着鱼雷波束与目标正横法线方向夹角的增大,目标回声强度变小,正对艇艉方向最小。这种变化规律主要是从正横到艇艉方位的回波由潜器艇体及其艉部舵翼部位引起的。预报可以为实战条件下大型潜器遭到主动声呐和声自导鱼雷攻击时提供合理规避逃逸方式。同时,对实战条件下鱼雷攻击战位的选择也具有重要指导意义。
本文的研究思路方法为后续开展对运动目标回声强度的预报拓展了一条新的途径。
参考文献
[1] R. J. 尤立克, 洪申译. 水声原理[M]. 哈尔滨船舶工程学院出版社, 1990.URICK R J. HONG Shen Translate. Principles of underwater sound[M]. Harbin institute of Marine engineering press, 1990.
[2] GAUTAN SENGUPTA. Numerical simulation of acoustic scattering from submarines, computational acoustics[M]. Volumes I,ELSEVIRE Science Publishers, 1993.
[3] 范军, 汤渭霖. 声呐目标强度(TS)计算的板块元方法[J]. 声学技术, 1999, 18(增刊): 31-32.FAN Jun, TANG Weilin. The calculation of sonar target strength of BKY [J]. Technical Acoustics, 1999, 18 (SUPPL): 31-32.
[4] 范军. 水下复杂目标回波特性研究[D]. 上海: 上海交通大学船舶海洋与建筑工程学院, 2002.FAN Jun, Study on echo characteristics of underwater complex targets[D]. Shanghai: Shanghai Jiaotong University School of Naval Architecture, Ocean and Civil Engineering, 2002.
[5] 范军. 水下复杂目标回声特性研究[D]. 上海: 上海交通大学,2001.FAN Jun. Study on echo characteristics of underwater complex targets[D]. Shanghai: Shanghai Jiaotong University, 2001.
[6] 范军, 汤渭霖. 声呐目标回声特性预报的板块元方法[J]. 船舶力学, 2012, 16(1-2): 171-180.FAN Jun,TANG Weilin. The Planar Elements Method for forecasting the echo characteristics from sonar targets[J]. Journal of Ship Mechanics, 2012, 16(1-2): 171-180.
[7] 潘安, 卓琳凯, 范军. 鱼雷的回波特性[J]. 上海交通大学学报,2012, 46(7): 1163-1167.PAN An, ZHUO Linkai, FAN Jun. Research on the Echo Characteristic of Underwater Small Targets[J]. Journal of Shanghai Jiaotong University, 2012, 46(7): 1163-1167.
[8] 卜考英. 水下目标回波特性预报模型验证研究[D]. 上海: 上海交通大学船舶海洋与建筑工程学院, 2006.BU Kaoyin. Validation research on the echo characteristics prediction model of target Underwater[D]. Shanghai: Shanghai Jiaotong University School of Naval Architecture, Ocean and Civil Engineering, 2002.
[9] 李建鲁, 范军, 汤渭霖. 水下简单形状目标回声的近远场过渡特性[J]. 上海交通大学学报, 2001, 35(12) : 1846-1850.LI Jianlu, FAN Jun, TANG Weilin. Transition from near field to far field of echoes from simple shape targets in water[J]. Journal of Shanghai Jiaotong University, 2001, 35(12): 1846-1850.
