基于单片机智能灭火小车控制系统的设计
2014-05-17朱志平
朱志平
(渭南师范学院物理与电气工程学院,陕西渭南 714099)
【物理与电气工程研究】
基于单片机智能灭火小车控制系统的设计
朱志平
(渭南师范学院物理与电气工程学院,陕西渭南 714099)
设计了一种智能灭火小车控制系统.系统采用STC89C52单片机作为核心器件,通过C语言编程实现了小车自动寻找火源、确定灭火路线、判断并自动躲避障碍物到达火灾发生地进行灭火.通过实验智能灭火小车达到智能寻迹和自主灭火的功能,结构简单、体积小、功耗低、准确度高,具有一定的实用价值.
智能小车;STC89C52单片机;火焰检测;避障;灭火
0 引言
现今社会,火灾一次次地威胁着人类生命财产的安全,带来的危害已经不止一次给人们敲响了警钟.不论火灾发生的原因是什么,一旦有火灾发生,消防人员就应及时到达现场进行灭火,这就给消防人员自身安全带来巨大威胁.而今,人工智能已在各个领域得到广泛应用,并且取得了令人瞩目的成就.人工智能也称为机器智能[1],是一门研究人类智能机理与如何用计算机模拟人类智能活动的学科.本文设计了一种基于STC89C52单片机智能灭火小车控制系统.该系统能自动寻找火源并控制灭火系统进行灭火,减少了人力所为,保障了人身的安全.
1 系统硬件电路设计
1.1 整体设计方案
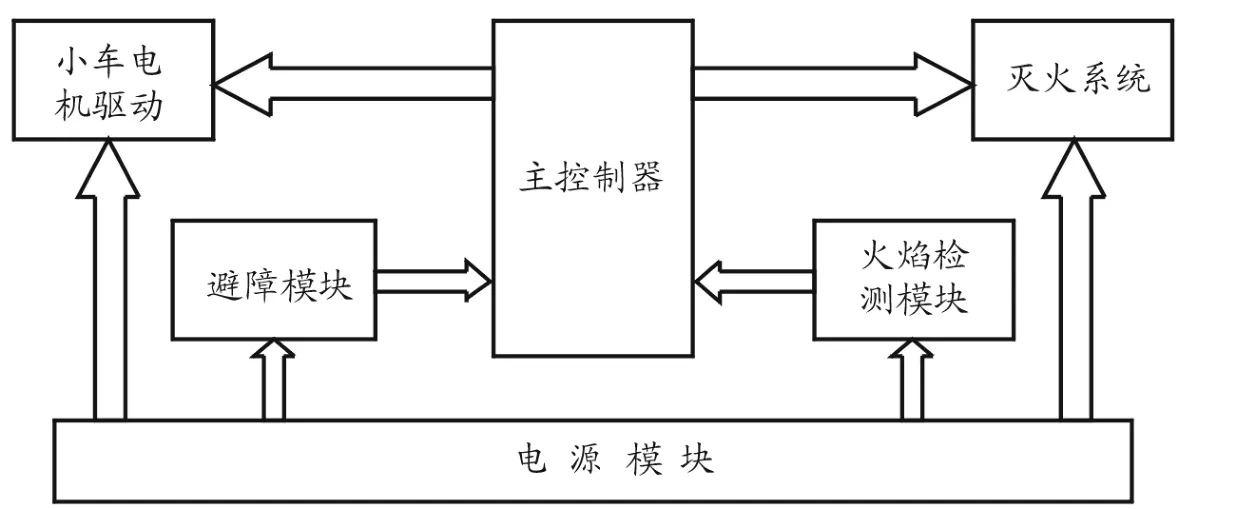
图1 硬件设计框图
智能灭火控制系统电路分为电源、电机驱动、避障、火焰检测、灭火和主控制器等6个模块,如图1所示.火焰检测模块将检测到的火源信号送给主控制器进行实时处理,主控制器将处理后的信号发送给驱动模块,驱动模块在接收到主控制器的命令后便驱动电机控制小车转弯或直行.当小车在前进过程中遇到障碍物时,避障模块会检测到障碍信号,并将障碍信号及时送往主控制器,经主控制器处理后发往驱动电路控制小车左转或右转避开障碍物继续前行.到达火灾现场时,主控器(单片机)通过晶闸管导通驱动灭火系统进行灭火.电源模块是一个通用的9 V电源,用来向其他模块供电.
1.2 主控芯片STC89C52
主控器采用STC89C52单片机,具有如下特点[2]:40个引脚,8k Bytes Flash片内程序存储器,512 bytes的随机存取数据存储器(RAM),32个外部双向输入/输出(I/O)口,5个中断优先级2层嵌套中断,2个16位可编程的定时计数器,2个全双工串行的通信口,看门狗(WDT)电路,片内有时钟振荡器.除此之外, STC89C52还配置了振荡频率可为0 Hz并可通过软件设置省电模式[3].在空闲模式下,CPU暂时停止工作,而RAM定时计数器串行口,外中断系统仍可继续工作,掉电模式冻结振荡器而保存RAM的数据,停止芯片其他功能直到外中断激活或硬件复位[4].
1.3 避障模块
小车车头装有3个光电开关,每个光电开关的检测范围是60度,中间一个光电开关正对前方,两侧光电开关各分开30度,正好完成180度的检测.小车在行进中由光电开关向前方发射出红外线[5],当红外线遇到障碍时发生漫反射,反射光被光电开关迅速接收.小车根据3个光电开关接受信号的情况判断前方障碍物的情况,然后做出相应的动作,光电开关的平均探测距离为30 cm.该模块在整个系统中起到很大的作用,小车能否避开障碍物顺利到达火源处全靠避障模块的处理.光电检测电路如图2所示.可调电阻R3用于调节比较器的门限电压,经示波器检测,输出波形相当规则,可以直接满足单片机查询使用.
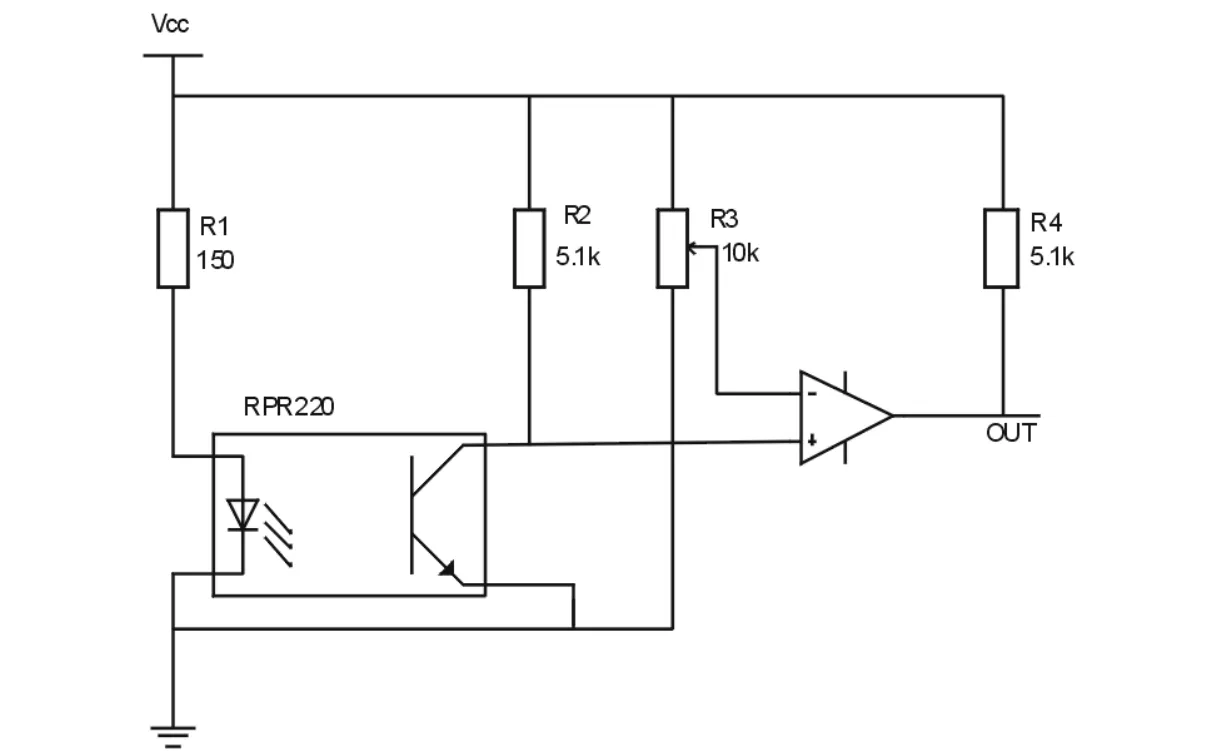
图2 光电检测电路
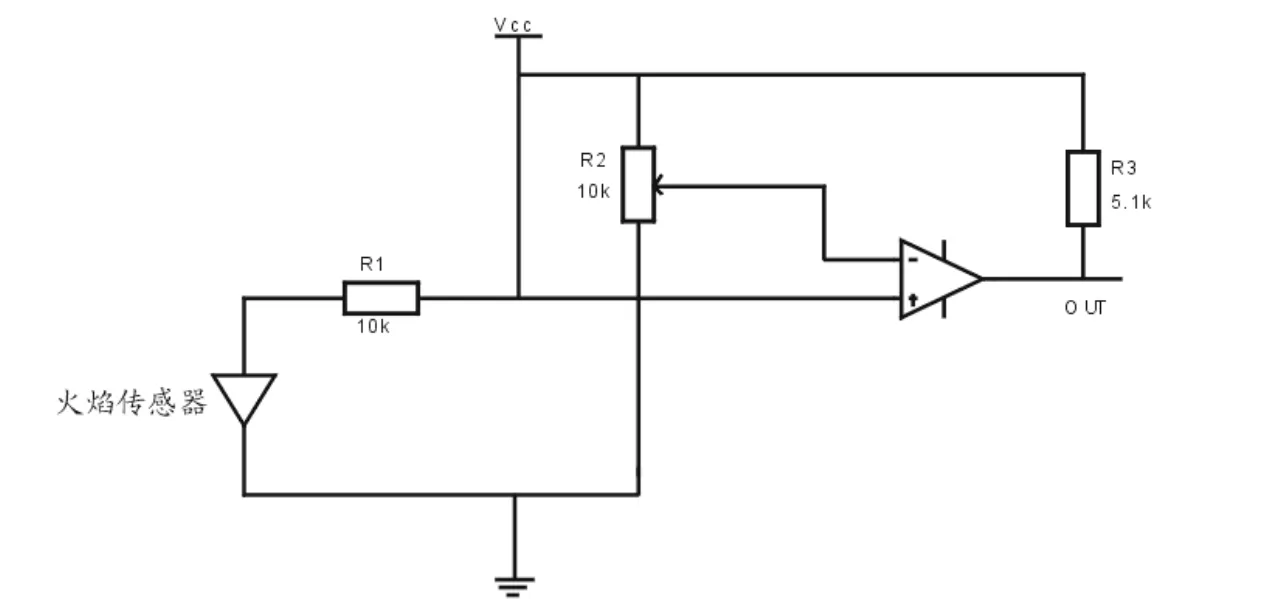
图3 火焰传感电路
1.4 火焰检测模块
火焰检测模块的传感器R2868是利用红外敏感型元件对红外信号强度的检测并将其转换为单片机可以识别的信号,从而来检测火焰信号,电路如图3所示.
在该电路中,当火焰传感器没有检测到火焰时,火焰传感器不导通而使火焰传感器的阳极上拉电阻R1上拉为高电平,经比较器滤波整形后输出高电平.当检测到火焰时,火焰传感器导通,比较器输出低电平.当外界红外越强时,输出的电压值越小,反之则越大.单片机根据接收到火焰传感器的电压数值就能判断是否找到了火源,并决定是否停车,发出警报,驱动灭火系统进行灭火.
1.5 驱动电机系统方案设计
本设计用直流电机作为该系统的驱动电机,采用PWM(Pulse-Width Modulation)调速方法,通过改变方波的占空比实现对电机转速的调节.与其他调速系统相比,PWM调速系统有下列优点[6]:(1)PWM从处理器到被控制系统信号都是数字形式的,无需进行数模转换;(2)对噪声抵抗能力的增强是PWM相对于模拟控制的另一个优点;(3)由于电力电子器件只工作在开关状态,主电路损耗较小,装置效率较高; (4)主电路简单,所用功率元件少;(5)低速性能好,稳定精度高,调速范围宽.
小车行走时,当左边的传感器检测到障碍物时,使左轮转动右轮停止,控制小车向右偏转,避开障碍物后,小车转回继续直行;当右边的传感器检测到障碍物时,使右轮转动左轮停止,控制小车向左偏转,避开障碍物后,小车转回继续直行,驱动电路如图4所示.
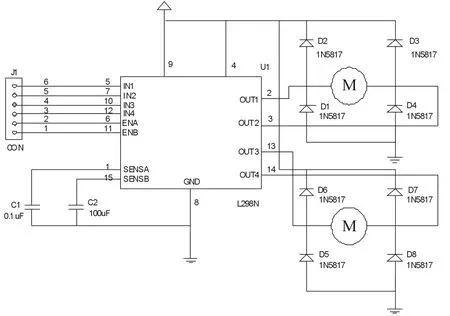
图4 驱动电路
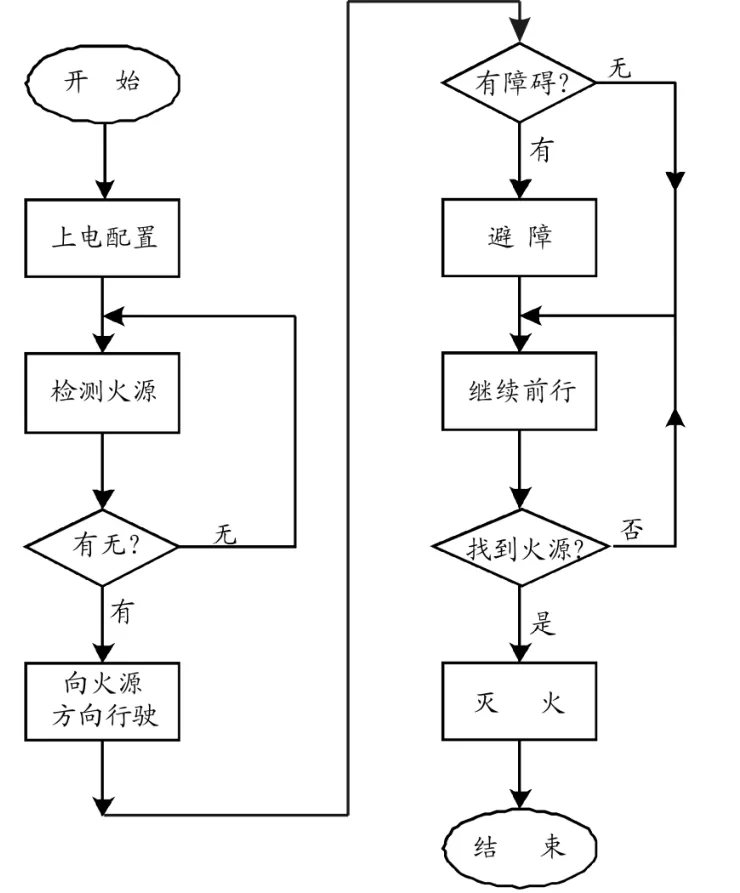
图5 系统功能流程图
1.6 灭火控制系统
当智能小车到达火场停车之后,主控器发出指令,晶闸管导通并驱动灭火系统进行灭火(在这里灭火系统用风扇来代替).
2 系统软件设计
本次设计采用自顶向下的设计方法,利用单片机适用的C语言分别设计顶层和各下层模块[7],并通过反复的实验和调试确保电路设计的正确性,系统软件流程如图5所示.系统启动后,首先进行上电配置,然后火焰检测模块寻找火源,如检测到火源,主控器令驱动模块向火源方向前行.在前行过程中如有障碍物,避障模块将检测到的障碍信号发送给主控器,由主控器令驱动模块驱动小车左转或右转避开障碍物继续前行.在检测到达火源地的信号后,智能小车停止前进,并发出指令控制灭火系统进行灭火.
3 结语
本设计以STC89C52单片机为核心,利用数字集成电路技术设计了智能小车灭火控制系统.在实验室以蜡烛做火源,沿途设立各种障碍,小车均能自动找到火源方向,沿着最短路线向火源发生地前行.在中途遇到各种障碍时,能灵活避开,绕道而行.小车到达火源发生地时能迅速驱动灭火系统灭火.智能灭火小车结构简单、体积小、功耗低、准确度高,具有一定的实用价值.
[1]张毅刚.单片机原理及应用[M].北京:高等教育出版社,2006.11-15.
[2]翟玉文.电子设计与实践[M].北京:中国电力出版社,2005.256-257.
[3]杨振江,孙占彪,王曙梅,等.智能仪器与数据采集系统中的新器件及应用[M].西安:西安电子科技大学出版社,2001. 56-88.
[4]何遐龄.微电子技术在数据采集系统中的应用[J].微电子学,1994,24(1):25-31.
[5]张景元.基于单片机的多用途定时器的设计与实现[J].电子工程师,2000,(8):22-31.
[6]沈兰荪.高速数据采集系统的原理与应用[M].北京:人民邮电出版社,1995.5-6.
[7]胥芳.MCS-52单片机原理及嵌入式系统应用[M].西安:西安电子科技大学出版社,2007.268-273.
【责任编辑 牛怀岗】
Design of Intelligent Fire-fighting Vehicle Based on the MCU
ZHU Zhi-ping
(School of Physics and Electrical Engineering,Weinan Normal University,Weinan 714099,China)
An intelligent fire-fighting vehicle based on MUCwas designed.STC80C52 was used for the key device in this system.Itwas programmed by C language.It achieves the functions of intelligent tracking and auto fire extinguishing,by automatically finding the fire-fighting way,judging and avoiding obstacles,finding and putting out the fire.The intelligent fire-fighting vehicle has the advantages of simple design,small volume,low power consumption and high accuracy,and it is of a certain practical value.
intelligent car;STC89C52 microcontroller;flame detection;obstacle avoidance;extinguishing a fire
TB47
A
1009-5128(2014)03-0022-04
2013-12-15
渭南师范学院科研计划项目:传感器微弱信号检测方法研究(13YKS013)
朱志平(1959—),男,陕西武功人,渭南师范学院物理与电气工程学院副教授,主要从事电子电气工程研究.
