基于S型曲线轨道的桥式起重机最优控制
2014-05-16欧阳慧珉张广明王德明
欧阳慧珉,张广明,王德明,梅 磊,邓 歆
(南京工业大学自动化与电气工程学院,南京 211816)
基于S型曲线轨道的桥式起重机最优控制
欧阳慧珉,张广明,王德明,梅 磊,邓 歆
(南京工业大学自动化与电气工程学院,南京 211816)
针对桥式起重机荷载的残留摆动问题,提出一种基于S型曲线的轨道生成法实现残留摆动抑制。首先,导出桥式起重机的简易动力学模型。其次,基于该模型通过数值计算生成同时考虑了最短运输时间和残留摆动的最优S型曲线轨道。最后,比较仿真和实验结果验证所提方法的有效性。通过使用此法可以实现在无测量摆角的传感器系统情况下准确迅速地操作起重机,从而大大地简化其结构和降低其安装成本。
桥式起重机;运动控制;最优控制;残留摆动抑制;S型曲线轨道
起重机系统被广泛地用于各种场合来搬运沉重物体,例如建筑工地,工厂,核设施以及港湾等。而桥式起重机作为一种常见设备被安置在厂房内用于搬运各种物料,为工厂自动化(Factory Automation)的发展做出了贡献。然而,随着搬运的高速化,当荷载到达指定位置时所产生的荷载残留摆动也随之增大,这样不仅降低了搬运精度同时也减缓了搬运的速度。除此之外,上述问题还会造成事故,人员伤亡以及破坏周围的环境。
为了提高荷载的搬运精度和人员工作的安全性,许多研究人员已经为桥式起重机系统开发了各种各样的控制方式。Ma等[1]针对桥式起重机运行安全问题提出了一种紧急制动控制策略。该策略分为两部分:在第一部分中,一个制动控制器应用于小车用来保护荷载;在第二部分中,一个基于能量衰减的控制器来保证整个系统的稳定性。然后通过一个自动切换方式实现控制性能。Zhao等[2]针对桥式起重机系统中输入延迟和执行器饱和问题提出了一种基于Takagi-Sugeno (TS)模糊模型的控制方式实现荷载摆动抑制。除此之外还包糊模型的控制方式实现荷载摆动抑制。赵志刚等[3]为柔性机械臂设计了一种基于最优反馈控制与输入整形相结合的方法,仿真分析结果表明,所设计的混合控制策略可以有效地抑制柔性振动。欧阳慧珉等[4-5]为旋转起重机设计了基于LMI的鲁棒控制方法和基于李亚普诺夫稳定性定理的非线性控制算法。除此之外还包括增益调度控制[6-8],滑模变结构控制[10-12],自适应控制[13-15]。
然而,在现存的研究中大多采用闭环控制方式,即利用由传感器系统测量到的摆角信息实现摆动抑制控制。虽然这样可以实现对起重机系统的鲁棒控制,但是需要测量摆角的传感器系统从而增加系统安装难度和成本。
本文针对上述问题提出一种基于S型曲线的轨道生成法实现残留摆动抑制。首先,导出桥式起重机摆动系统的动力学模型。其次,基于该模型通过数值计算生成同时考虑了最短运输时间和残留摆动的最优S型曲线轨道。最后,比较仿真和实验结果验证所提方法的有效性。通过使用此法可以实现在无测量摆角的传感器系统情况下准确迅速地操作起重机,从而大大地简化其结构和降低其安装成本。
1 桥式起重机模型

图1 桥式起重机模型Fig.1 Schematic model of overhead crane
在如图1所示的桥式起重机模型中,M,m分别表示小车和荷载质量;x,l分别表示小车的位移和悬绳长度;θ,F分别表示荷载离开平衡点的角度和小车的入力。
假设桥式起重机模型具有以下特性:
①荷载可以看作是质点,且悬绳的扭力可忽略不记;
②仅考虑荷载-悬绳振动系统中的1次振型;
根据拉格朗日运动方程桥式起重机的动力学模型

式中g表示重力加速度。
根据上述假设,将该系统在平衡点处进行线性化得到其线性模型

其中摆角的动力学方程

式中ωn表示振动系统的固有角频率。
2 轨道生成与最优化结果
本小节基于式(5)所示模型生成预先考虑了残留摆动的S型曲线速度轨道。该轨道如图2所示,其中参数t1,t2,t3,v分别表示加速区间,匀速区间,减速区间以及最高速度。
S型曲线速度轨道为

图2 S型曲线速度轨迹Fig.2 S-shaped curve velocity trajectory
取式(6)的时间导数,得到其加速度轨道

由于在考虑抑制残留摆动的同时也需要考虑最短运输时间,且最高速度v可由下式求出:

因此本文采用如下所示性能指标来求最优解:

由式(5)可知,最优化计算所需要的参数为小车移动距离x和荷载的固有角频率ωn,并分别设定为x=800 mm,ωn=6.28 rad/s。其最优化结果如下所示:


图3 实验系统Fig.3 Experimental system
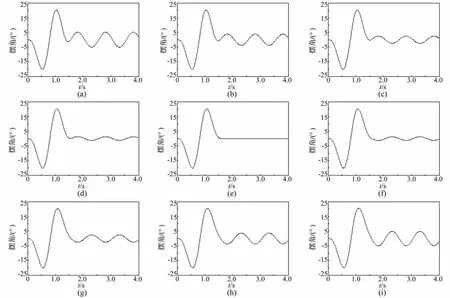
图4 仿真结果Fig.4 Simulation results
3 仿真与实验
3.1 实验系统
实验系统如图3所示。该系统是由一个DC电动机和一个带有振子的移动平台组成,其中通过安装在该电机上的编码器可以测量出该电机的回转角度以及平台的位置信号。同时通过安装在振子支点处的编码器,可以测量出振子的角度,但在本系统中,该编码器只是用来观测振子摆角而不用于残留振动抑制控制。从各个编码器获得的脉冲信号在脉冲计算器中计算再读入到计算机中。基于编码器获得的信号计算出速度指令,再通过D/A接口得到电压指令,最后通过电机驱动器来驱动电机运行。
3.2 仿真与实验结果
本节通过比较仿真与实验验证式(19)所示结果的有效性。加速与减速区间以0.01 s为间隔变化,共设定9个动作条件,其中最优化结果为(e),其结果如表1所示。另外,仿真与实验的条件如下所示:
(1)小车运行距离x=800 mm;
(2)加速区间和减速区间相等,即t1=t3;
(3)全部动作时间为t1+t2+t3=1.62 s。
仿真与实验结果如图4和图5所示。由图4可知,从条件(a)开始随着加速区间的增大,系统的残留振动不断减小,在(e)处达到最小;随后再随着加速区间的继续增大,系统的残留振动又开始不断增大。在图5中也存在着和图4同样的规律,并且与图4的结果基本一致。

图5 实验结果Fig.5 Experimental results

表1 仿真与实验条件Tab.1 Simulation and experimental conditions
4 结 论
本文针对桥式起重机荷载的残留摆动问题,提出了一种基于S型曲线的轨道生成法实现残留摆动抑制。首先,导出了桥式起重机的简易动力学模型。其次,基于该模型通过数值计算生成了同时考虑了最短运输时间和残留摆动的最优S型曲线轨道。最后,比较仿真和实验结果验证了所提方法的有效性。只有当动作条件满足式(19)时,其残留振动才能得到良好的抑制。通过使用此法可以实现在无测量摆角的传感器系统情况下准确迅速地操作起重机,从而大大地简化其结构和降低其安装成本。
[1]Ma B,Fang Y,Zhang Y.Switching-based emergency braking control for an overhead crane system[J].IET Control Theory&Applications,2012,4(9):1739-668.
[2]Zhao Y,Gao H J.Fuzzy-model-based control of an overhead crane with input delay and actuator saturation[J].IEEE Transaction on Fuzzy Systems,2012,20(1):181-186.
[3]赵志刚,游斌弟,赵阳.改进型负输入整形与最优控制结合的振动抑制方法[J].振动与冲击,2014,33(8):202 -208.
ZHAO Zhi-gang,YOU Bin-di,ZHAO Yang.Combination of modified negative input shaping and optimal control forvibration suppression[J].Journal of Vibration and Shock,2014,33(8):202-208.
[4]欧阳慧珉,佐野滋则,内山直树,等.基于LMI的旋转起重机鲁棒控制器设计[J].振动与冲击,2014,33(1):106-112.
OUYANG Hui-min,SANO S,UCHIYAMA N,et al.Robust controller for rotary cranes based on LMI[J].Journal of Vibration and Shock,2014,33(1):106-112.
[5]欧阳慧珉,内山直树,佐野滋则,等.只利用旋臂旋转运动的起重机消摆控制[J].振动与冲击,2014,33(4):131 -137.
OUYANG Hui-min,UCHIYAMA N,SANO S,et al.Load swaysuppressioncontrolforrotarycranesusingonly horizontal boom motion[J].Journal of Vibration and Shock,2014,33(4):131-137.
[6]Lee H H.Modeling and control of a three-dimensional overhead crane[J].Transactions of the ASME,Journal of Dynamic Systems,Measurement,and Control,1998,120:471-476.
[7]Giua A,Seatzu C,Usai G.Observer-controller design for cranes via Lyapunov equivalence[J].Automatica,1999,35,669-678.
[8]Omar H M,Nqyfeh A H.Gantry cranes gain scheduling feedback control with friction compensation[J].Journal of Sound and Vibration,2005,281:1-20.
[9]Bartolini G,Pisano A,Usai E.Second-order sliding-mode control of container cranes[J].Automatica,2002,38:1783 -1790.
[10]Ngo Q H,Hong K S.Sliding-mode antisway control of an offshore container crane[J].IEEE/ASME Transaction on Mechatronics,2012,17(2):201-209.
[11]Liu D,Yi J,Zhoa D,et al.Adaptive sliding mode fuzzy controlforatwo-dimensionaloverheadcrane[J].Mechatronics,2005,15:505-522.
[12]Ngo Q H,Hong K S.Adaptive sliding mode control of container cranes[J].IET Control Theory&Applications,2012,6(5):662-668.
[13]Yang J H,Yang S K.Adaptive coupling control for o verheadcrane systems[J].Mechatronics,2007,17:143 -152.
[14]Fang Y C,Ma B J,Wang P C,et al.A motion planningbased adaptive control method for an underactuated crane system[J].IEEETransactiononControlSystems Technology,2012,20(1):241-248.
[15]Pal A K,Mudi R K.An adaptive fuzzy controller for overhead crane[C].ICACCCT,2012,300-304.
Optimal control for overhead cranes based on an S-shaped curve trajectory
OUYANG Hui-min,ZHANG Guang-ming,WANG De-ming,MEI Lei,DENG Xin
(College of Automation and Electrical Engineering,Nanjing Tech University,Nanjing 211816,China)
Aiming at the residual load sway problem of overhead cranes,an S-shaped curve trajectory generation method was proposed to realize residual load sway suppression.Firstly,a dynamic model of an overhead crane was derived.Next,an optimal S-shaped curve trajectory getting the shortest transport time and residual load sway suppression was generated with the numerical calculation method.Finally,comparing the results of simulations and tests validated the effectiveness of the proposed method.Thus,the crane could be precisely and rapidly operated without sensor systems for measuring load sway,the structure of the crane was simplified and its installing cost was reduced.
overhead crane;motion control;optimal control;residual load sway suppression;S-shaped curve trajectory
TH21
A
10.13465/j.cnki.jvs.2014.23.025
国家自然科学基金(51277092);江苏省基础研究计划(自然科学基金)资助项目(BK20130938);江苏省高校自然科学研究项目资助(14KJB510013)
2013-08-08 修改稿收到日期:2014-07-16
欧阳慧珉男,博士,讲师,1982年6月
