一种基于延迟系数技术的次级通道在线辨识新方法
2014-05-16浦玉学姜金辉
浦玉学,张 方,姜金辉,徐 菁,蒋 祺
(南京航空航天大学航空宇航学院机械结构力学及控制国家重点实验室,南京 210016)
一种基于延迟系数技术的次级通道在线辨识新方法
浦玉学,张 方,姜金辉,徐 菁,蒋 祺
(南京航空航天大学航空宇航学院机械结构力学及控制国家重点实验室,南京 210016)
工程中控制目标区域改变、误差传感器位置变化或其他因素会引起的次级通路的实时改变,精确的辨识次级通道传递函数可以有效的提高噪声主动控制效率。基于人工延迟系数技术提出一种新的次级通道在线辨识方法,推导出主动控制环节收敛步长和次级通路建模环节收敛步长的调整表达式,从收敛性能和算法计算量两方面跟传统算法进行比较,得出其改进优势。给出新的附加噪声功率控制策略,实现对附加随机噪声功率的调节,在保证系统稳定的情况尽量消除其对残余噪声的影响。最后,进行了算法仿真和噪声主动控制实验,结果表明该算法具有收敛性好,降噪性能高的特点。
噪声主动控制;次级通道在线建模;辅助噪声功率策略;延迟系数技术
由于噪声主动控制(ANC)能有效弥补被动控制低频效果不好、重量代价大的缺点,成为近年来噪声控制领域的研究热点[1]。基本原理是通过自适应控制律调节输出,驱动次级声源产生次级声场,与初级声场叠加,达到抑制噪声的目的。随着自适应主动控制技术的不断发展,主动控制技术在管道、封闭空间、结构声辐射等方面的噪声控制取得了较成功的应用[2]。
自适应主动控制系统区别于自适应信号处理系统在于前者存在次级通道(次级声源到误差传感器之间的通道Secondary Path)。次级通道特性对噪声主动控制算法实现、系统的收敛性以及控制效果有着重要影响,如何对次级通道进行快速、精确的建模,是噪声主动控制系统设计时必须考虑的关键问题之一。对次级通道建模有离线建模和在线建模两种,如果在主动控制期间,次级通路的系统特性基本保持不变或变化缓慢,采用离线建模方式能简化控制算法。然而当系统特性改变比较明显时,就应该采用在线建模以确保满足控制系统的稳定性和控制精度的要求。
1 前馈式控制模型
本文讨论的次级通路在线建模问题是基于前馈控制式的有源噪声控制系统,这种系统具有实现简单,稳定性好的优点[3]。图1是一个典型的单通道前馈噪声控制系统示意图。

图1 前馈式噪声主动控制系统Fig.1 Adaptive active feedforward control system
2 在线次级通道建模算法
基本的在线建模技术是由Eriksson提出的附加随机噪声法[4],该方法存在次级通道辨识环节与主动控制环节相互影响,严重时将导致算法发散,此外附加的随机噪声会在残余噪声中体现出来,主动控制环节对其不起作用。为了改进Eriksson方法的性能,张明等[5]引入第三个滤波器试图解决附加噪声对控制器权系数的不良影响,算法框图如图2(包括虚线框图),对张的方案进一步分析可知当系统收敛稳定后时,第三个滤波器权系数收敛到零向量,一旦系统出现扰动,只能从零向量开始调整,这势必影响系统再次收敛的性能。杨铁军[6]在张明的基础上增加了一个误差通道滤波器,在调整自适应滤波器和第三个滤波器的权系数的误差信号中减去次级控制信号的滤波信号。增加滤波器数量改进算法性能的方法可以消除辨识环节和主动控制环节的相互影响,但缺点是由于滤波器的数目的增加引起算法计算量的提高,且无法解决附加随机噪声无法从残余噪声中剔除的问题。
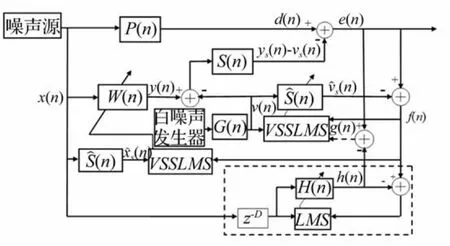
图2 张明算法和Akhtar算法框图Fig.2 Zhang’s algorithm and Akhtar’s algorithm for online secondary path modeling
在近些年出现的次级通道在线辨识算法中,Akhtar[7]提出的变步长算法(VSS-LMS)辨识次级通道受到了普遍的关注,这种通过自适应调整收敛因子步长改进了Eriksson提出的基本方法的性能而不增加系统的计算量。Akhtar方法的系统框图如图2所示(不包括虚线框图),主动控制滤波器W(n)和次级通路建模滤波器的更新输入误差信号都为f(n)。f(n)的大小Akhtar通过观察经验判断:当n=0时,系统处于最不稳定的状况,收敛性最差。此时设μs为一个非常小的值μsmin,随着系统开始收敛,μs应该相应逐渐增加,以提高系统的收敛性能。然而由于无法直接获得误差信号中的干扰变量,Akhtar试图用误差信号e(n)和f(n)的功率比值调整收敛因子的大小。μs的调节过程如下:

很明显,Akhtar的方法无论在计算量还是在系统的实时收敛性能方面具有很大的改进,但由于收敛因子的调整策略是基于经验公式判定,算法特性和理论分析比较困难。针对Akhtar的方法的不足,Carini[8]将最优变步长(Optimal Variable Step-Size)方法用于更新次级建模滤波器S^(n)。然而由于引入MFxLMS算法结构,其计算复杂度甚至超过了张的算法,并且在试图调整μw大小时,由于无法计算权系数W(n)到最优值的失调量,自适应调整过程中误差信号与滤波信号的乘积的指数平滑预测作为失调量的近似,相当于将两次迭代之间权系数差值的平方作为μw的调整,虽然局部改善主动控制环节的收敛性能,但算法稳定性较差。
除此之外,吴英姿提出的基于峰值预滤波次级通道在线建模方法[9]对于附加随机白噪声过分增加原有声场能量有一定的改善作用,但该方法只是针对窄带信号,应用面很局限。
3 本文改进算法
根据以上各种在线建模算法的特点,本文在基于最简单的前馈式FXLMS控制模型,从以下两方面对次级通路在线建模算法进行改进:
(1)基于延迟系数技术从理论上提出主动控制环节收敛步长和次级通路建模环节收敛步长的调整表达式。从收敛性能和算法计算量两方面跟传统算法进行比较,得出其改进优势。
(2)基于能量控制策略实现对附加随机噪声功率的调节,以尽量消除其对残余噪声的影响。
3.1 基于延迟系数技术的次级通道在线辨识算法
如图2所示,基于最简单的前馈式FXLMS控制模型,主动控制滤波器和次级通路建模滤波器权系数的自适应更新算法分别采用FXLMS算法和LMS算法,权系数更新表达式如式(2)~式(4):

由式(4)可知:主动控制滤波器和次级通路建模滤波器权系数的理论误差信号应分别为[d(n)-ys(n)]和[vs(n)-]。其中[d(n)-ys(n)]为)自适应更新的干扰误差信号,[vs(n)-]为W(n)自适应更新的干扰误差信号,如何尽可能的消除干扰误差信号对权系数自适应调整的影响,是提高主动控环节和次级通路建模环节收敛性能关键问题。
下面将f(n)做进一步推导:

式中Wopt(n)是理论最优值,S(n)是真实次级通路的FIR滤波器系数。

通常情况下,为了避免系统发散,主动控制环节的收敛因子被设置为一个远小于1的正常数,显然,自适应的调整μw的值,可以进一步改善系统的降噪量和权系数的收敛速度。Davari等[10]分析参考信号和附加随机噪声功率对主动控制环节收敛性的影响,得出μw根据Pv(n)/Px(n)变化的结论,理由是参考信号功率增加则系统趋于发散,故μw值变小,而附加随机噪声功率大,则次级通道建模环节收敛性变好,μw调整为大值,可进一步改善系统收敛性。从控制环节滤波器权系数更新公式可以看到,权系数的收敛性不仅受到参考信号、附加随机信号的影响,还受到另外一个重要变量次级通道辨识误差的影响:当在线辨识刚开始的时候,辨识误差大,干扰误差信号对主动环节收敛性以及稳定性的影响很大,此时,μw必须是一个很小的值,而当辨识环节收敛以后,辨识误差趋近于很小值,对系统性能影响变小,μw可以相应的变大。此外还应避免当辨识误差趋近于零时μw趋向无穷大,根据以上分析,本文给出μw一个新的变步长策略:
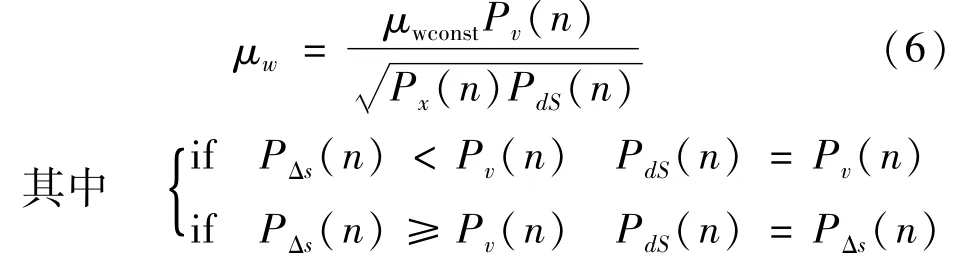
当辨识误差功率估计大于附加随机噪声的功率估计时,应用本文提出的μw变步长策略将有效提高主动控制环节收敛性能。反之,(6)式将统一于文献[10]的调整策略。
而对于次级通路建模环节,消除干扰误差信号影响后的权系数表达式为:

这样,通过调整μs的值,可以消除干扰项[d(n)-ys(n)]对次级通道建模环节的影响。下面再来分析式(7),由于当系统逐渐收敛后,ΔS(n)和ΔW(n)逐渐趋近于零。式(7)分子分母都趋于零,数值稳定性差。将上式分子分母同乘以

对于次级通路的估计偏差PΔS(n)的评估,本文采用一种在回声消除领域常用的延迟系数技术(Delay Coefficient Technique)。设定滤波器的长度为D+M。这种技术是基于如下已知特性:自适应滤波器趋向于均匀地将加权误差(滤波器失配)向量ΔS(n)扩展到它的前D个系数上。是将v(n)延迟D个采样输入到次级通路中,相当于v(n)通过Z-D的延迟滤波器,控制过程中的前D个系数瞬态值可以估计系统的失调量,当系统稳定以后S^(n)的前D个系数趋近零,建模误差也趋近于零。次级通路的估计偏差与S^(n)前D个系数相一致。可以表达为


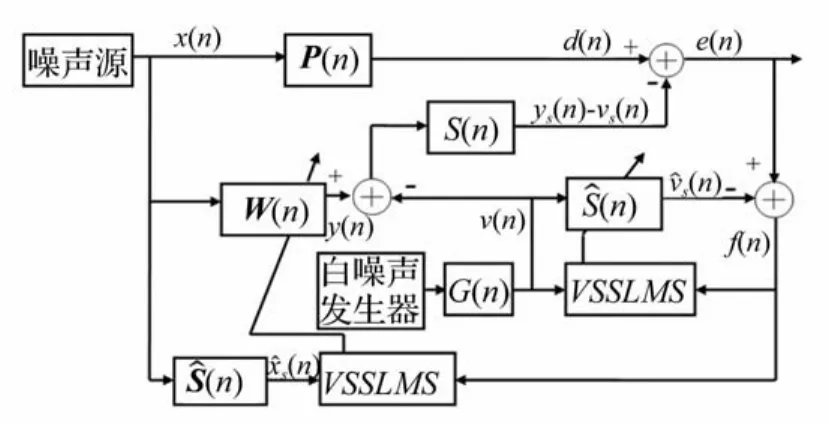
图3 本文次级通道在线建模算法框图Fig.3 The proposed algorithm for online secondary path modeling
3.2 计算量比较
下面将本文算法与前文提到的几种算法进行计算量比较,结果如表1。

表1 算法迭代计算量比较Tab.1 Comparison of Algorithms iterative computation
表1中N、M为初级通道、次级通路等效为FIR滤波器权系数阶数,H为张明方法中第三个滤波器权系数阶数,D为本文人工延迟系数的长度。从表1可知:本文算法的计算量远少于Carini算法计算量,这是因为本文提供的收敛步长调整表达式与Carini算法相比有很大的简化。本文算法计算量与张明和Akhtar的算法相当,这是由于为了估计次级通路的建模误差,本文算法延迟了D个次级通道权系数,而这增加的计算量相当于张明算法中引入第三个滤波器增加的计算量。
3.3 辅助噪声功率策略(Auxiliary Noise Power Scheduling)
控制输出端附加随机噪声技术是一种不依赖于被控噪声的次级通道在线辨识方法,所以可以在任意感兴趣的频段获得合理、正确的辨识结果。但该方法最大的缺点就是,所附加的随机噪声在误差信号中体现出来无法剔除,从而影响降噪效果。为了尽量消除稳定后的残余噪声,可以根据次级通路辨识情况调整附加噪声的功率大小:当辨识误差较大时,附加噪声以较大功率输出以保证次级通路辨识环节的收敛性能;当系统收敛后,次级通路辨识误差很小,此时可以将附加噪声调整到较小值。基于这一思路,本文提出一种新的基于附加随机噪声功率控制策略。

3.4 本文算法小结

表2 算法小结Tab.2 Summary of the proposed algorithm
4 仿真分析
为了验证本文给出算法的性能,本文基于Labview平台对算法进行仿真。并和文献[5]以及文献[7]提出的两种性能表现较好的在线辨识方法进行比较。
为了准确衡量在线建模的收敛性能建模的精确性,定义次级通路建模误差:

为了直观的衡量系统的降噪性能,定义下式做为衡量标准:

式中R值越大,则系统降噪量越大,反之亦然。
仿真之前需要设置初级通路和次级通路的传递函数初级通路的传递函数分别设为48阶和16阶FIR型滤波器,控制滤波器权系数W(n)和S^(n)阶数分别为48和16,其中张的算法中第三个滤波器阶数为16。
4.1 定频噪声信号控制算例仿真
设初级声源为一正弦信号与高斯白噪声合成信号,信噪比(SNR)为30 dB。正弦信号频率为150 Hz,幅值为2,高斯白噪声标准差0.01。附加随机噪声为零均值高斯白噪声信号,标准差为0.1。仿真结果如图4。

图4 定频噪声信号控制算例性能比较Fig.4 Performance Comparison on fixed-frequency noise control examples

图5 宽带噪声信号控制算例性能比较Fig.5 Performance Comparison on Broadband noise control examples
图4(a)给出了Akhtar算法和本文算法的次级通路建模环节收敛步长μs的随迭代次数增加的调整结果。其中,本文算法的收敛步长通过式(8)进行调整,由仿真结果可知,由于消除干扰项[d(n)-ys(n)]对次级通道建模环节的影响,在次级通道在线建模初期,收敛步长由极小值快速增加到较大值,这极大地提高了算法的收敛性。这一优越性能体现在次级通道建模误差仿真结果上,如图4(b)所示,本文算法相对于Akhtar和张明的算法,次级通道建模误差ΔS很快稳定下降到-45 dB,这说明次级通道估计值能更快速的收敛于次级通道的真实值。图4(c)给出了本文算法提出的噪声主动控制环节收敛步长μw调整结果,按式(6)进行调整有效提高主动控制环节收敛性能,进一步提高主动控制的降噪效果,图4(d)所示的是本文算法与上述两种算法在降噪性能(R)的比较,由图可知,通过自适应调节主动控制环节的收敛步长的大小,本文算法表现出了更好的降噪性能。
4.2 宽带噪声信号控制算例
环境噪声一般为随机噪声,为了尽可能模拟这类噪声,这里将参考信号设置为3个频段分别为30~50 Hz,100~150 Hz和300~330 Hz合成的宽带信号。附加随机噪声为零均值高斯白噪声信号,标准差为0.05。仿真结果如图5。
由图5可知,与定频噪声信号控制算例类似,在初级声场为宽带噪声的算例中,相对于Akhtar和张明的算法,本文算法无论是在次级通道建模的收敛性能还是在主动控制环节的降噪性能,依然表现出了其优越性能。但对于初级噪声为宽带噪声的情况,Akhtar和张明的算法主动控制工作时,鲁棒性较差,如图5(a)中Akhtar算法的次级通路建模环节收敛步长μs和图5(b)中Akhtar和张明算法次级通道建模误差ΔS均无法收敛到相对稳定值,到而本文算法则表现出了较强的平稳性。
4.3 次级声道突变控制算例
现在考虑一种特殊情况:次级声道在控制过程中突然发生变化。仿真控制系统的参考信号、附加随机噪声信号按照4.1小节情况设置,次级通道变化前的传递函数跟前几种情况一致,在系统迭代到40 000次时,次级通道产生突然变化。仿真结果如图6。

图6 次级声道突变控制算例性能比较Fig.6 Performance Comparison on fixed-frequency noise signal control examples
通过图6的仿真结果可以看出,即使次级通道发生了突然变化,本文提出的基于人工延迟系数方法提出次级通道在线辨识技术,依然能够适应这种突变,自适应的调整收敛步长,使控制过程具有更快的收敛性和更好的降噪效果。
5 实验验证
为了对本文提出的次级通道在线辨识技术的控制效果进行验证,本小节基于美国国家仪器公司的可重新配置嵌入式控制盒采集系统(NI CompactRIO)进行噪声主动降噪实验。实验的基本原理如图7所示:声压传感器接收到参考信号和误差信号后经转换后输入自适应控制器产生次级控制信号经控制扬声器产生次级声场与初级噪声声场叠加抵消实现降噪功能。参考信号和误差信号采用GRAS公司的声压传感器,模拟输入模块为四通道的NI 9215采集卡,模拟输出模块为NI 9263信号发生卡,功率放大器为南京佛能科技HEAS-5型功率放大器,作动器采用惠威SR6.5型音箱。
为了防止气流和外界背景噪声和声反射造成的干扰,尽量减少不必要的误差,本实验在本底噪声为30 db的消声室中进行。误差传感器与主扬声器中心和抵消扬声器中心处于同一水平面,且与两个扬声器中心距离均为是90 cm。
实验步骤为:
(1)建立噪声的模拟声场;
(2)噪声控制系统工作前,测量初级声场声压;
(3)打开控制系统,激发次级声场,进行噪声控制;
(4)测试并记录实验数据

图7 噪声主动控制试验物理框图Fig.7 The physical diagram of active noise control

图8 定频噪声主动控制结果图Fig.8 Results of Fixed frequency noise active control experiment

图9 宽带噪声主动控制结果图Fig.9 Results of Broadband noise active control experiment
下面分别就初级噪声为定频信号和宽带信号进行试验验证,图8和图9分别是频率为100 Hz的正弦波噪声和由频段分别为30~50 Hz,70~130 Hz和300~530 Hz合成的宽带信号在本控制系统下的降噪效果。
通过实验结果可以看出,初级噪声为定频信号,降噪效果25分贝左右;初级声源为宽带噪声信号,降噪在10到15分贝左右。降噪效果十分明显。
6 结 论
本文基于人工延迟系数方法提出一种新的次级通道在线辨识技术,提出的次级通道在线辨识的新方法,该方法具有收敛性好、计算量较小的特点,性能优于现存在的常用算法。基于labview平台对算法进行仿真,具有收敛性好,降噪性能高的特点。基于NI CompactRIO平台进行了噪声主动控制实验,取得很好的降噪效果,说明该方法具有很好的工程应用价值。
[1]陈克安.有源噪声控制[M].北京:国防工业出版社,2003:107-110.
[2]浦玉学,张方.多通道FURLS噪声主动控制算法及仿真[J].国外电子测量技术,2012,31(6):36-39.
PU Yu-xue,ZHANG Fang.Multi-channel FURLS algorithm for active noise control and simulation[J].Foreign Electronic Measurement Technology,2012,31(6):36-39.
[3]伭炜,鲍雪山,徐新盛.一种改进型FX结构在线建模有源噪声抵消系统[J].振动与冲击,2008,27(4):78-81.
XUANWei,BAOXue-shan,XUXin-sheng.Online modeling of ANC system with secondary path and modified FX-structure[J].Journal of Vibration and Shock,2008,27 (4):78-81.
[4]Eriksson L J,Allie M C.Use of random noise for on-line transducer modeling in an adaptive active attenuation system [J].Acoust.Soc.Am.1989,85(2):797-802.
[5]Zhang M,Lan H,Ser W.A robust online secondary path modeling methodwithauxiliarynoisepowerscheduling strategy and norm constraint manipulation[J].IEEE Trans.Speech and Audio Processing,2003,11(1):45-53.
[6]杨铁军,顾仲权,鲁明月,等.基于误差通道在线辨识的结构振动主动控制系统[J].振动与冲击,2004,23(3):55 -59.
YANG Tie-jun,GU Zhong-quan,LU Ming-yue,et al.Active control system for structural vibration with online secondary path identification[J].Journal of Vibration and Shock,2004,23(3):55-59.
[7]Akhtar M T,Abe M,Kawamat M.Noise power scheduling in active noise control systems with online secondary path modeling[J].IEICE Electronics Express,2007,4(2):66-71.
[8]Carini A,Malatini S.Optimal variable step-size NLMS algorithmswithauxiliarynoisepowerschedulingfor feedforward active noise control[J].IEEE Trans.Audio,Speech and Language Processing,2008,16(8):1383 -1395.
[9]吴英姿,鲍雪山,徐新盛,等.基于峰值预滤波次级通道在线建模的主动噪声控制系统[J].振动与冲击,2008,27 (1):89-92.
WU Ying-zi,BAO Xue-shan,XU Xin-sheng,et al.An active noise control system using online secondary path modeling with peak prefiltering technique[J].Journal of Vibration and Shock,2008,27(1):89-92.
[10]Davari P,Hassanpour H.Designing a new robust on-line secondary path modeling technique for feedforward active noise control systems[J].Signal Process,2009,89:1195 -1204.
A new method for online recognition of secondary path based on delay coefficient technique
PU Yu-xue,ZHANG Fang,JIANG Jin-hui,XU Jing,JIANG Qi
(State Key Laboratory of Mechanics and Control of Mechanical Structures,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China)
Changes of control target area and error sensor position or other factors may lead to the real-time change of secondary path in practical engineering.Accurate identification of secondary path transfer function can effectively improve the efficiency of noise active control.Here,a new secondary path online modeling method based on delay coefficient technique was proposed.The adjustment rules of the convergence step lengths of active control stage and secondary path modeling stage were derived.Comparing with the traditional algorithms for convergence performance and the computational complexity,the improvement advantages of the new method were gained.The proposed algorithm also introduced an auxiliary noise power scheduling for achieving the adjustment of the additional random noise power to ensure the system stability and eliminate its influence on the residual noise as much as possible.Numerical simulations and noise active control tests showed that the proposed method has better performances of convergence and noise reduction than the existing methods do.
noise active control;secondary path online modeling;auxiliary noise power scheduling;delay coefficient technique
TB535
A
10.13465/j.cnki.jvs.2014.23.014
基金项目:航空科学基金(2012ZA52001);高等学校博士学科点专项科研基金(20123218120005);国家自然科学基金资助项目(51305197);江苏高校优势学科建设工程资助项目
2013-05-28 修改稿收到日期:2013-11-28
浦玉学男,博士生,1987年12月生
张方男,教授,博士生导师,1962年8月生
