基于NSGAII的齿轮减速器多目标优化研究*
2014-05-14成晓升余军合战洪飞
成晓升,余军合,战洪飞
(宁波大学机械工程与力学学院,浙江宁波 315211)
0 引 言
在工程设计中,多目标优化问题非常普遍,而且求解过程通常比较复杂,如何获取这些问题的最优解,一直都是学术界和工程界研究的热点。一般情况下,多目标优化问题的各个子目标之间是矛盾的,一个子目标性能的改善有可能会引起另外一个或几个子目标性能的降低,要使全部子目标同时达到最优是不可能的,只能在它们中间进行协调和折中处理[1]。
许多学者对该类问题进行了研究。宁晓斌等[2]采用了多岛遗传法对评价汽车平顺性和操稳性的性能指标进行优化,有效地解决了多目标之间的矛盾。N.Srinivas和 Kalyanmoy Deb[3]提出了 NSGAII,采用快速非占优排序,降低了计算复杂度;采用拥挤距离比较算子,保持了种群的多样性;引进精英策略,扩大采样空间,防止优良个体的丢失,提高了运算速度和鲁棒性。
本研究基于拥挤距离的非占优排序方法,研究多约束、离散变量的处理方法;通过修改和调试NSGAII算法,以二级减速器的设计为例进行多目标优化设计,对优化结果进行对比分析,为多目标优化问题的求解提供参考。
1 多目标优化问题描述
多目标优化问题的数学形式可以如下描述[4]:
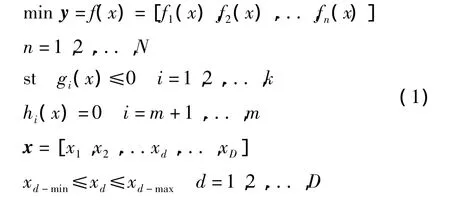
式中:x—D维决策向量;y—目标向量;N—优化目标总数;gi(x)≤0—不等式约束;hj(x)=0—等式约束;fn(x)—目标函数;xd-min,xd-max—每个变量的上、下限。
2 改进的非占优排序遗传算法
改进的非占优排序遗传算法(Non-Dominated Sorting in Genetic Algorithms II,NSGAII)的主要步骤包括:初始化种群、目标函数计算、非占优排序、选择操作、遗传和变异操作、种群替换策略和得到帕累托前沿[5]。本研究主要介绍基于拥挤距离的非占优排序方法,提出约束和离散变量的处理方法。
2.1 基于拥挤距离的非占优排序
基于拥挤距离的非占优排序包括:种群个体的非占优排序、拥挤距离的计算。
(1)非占优排序。即对种群中的所有个体进行两两比较。占优的个体相对其他个体而言,具有更低的非劣级别;互不占优的个体,具有相同的非劣级别。非占优序如图1所示[6]。
(2)拥挤距离的计算。先将所有染色体在某一目标函数值上从小到大进行排序。处于该排序中的某个染色体在这一目标函数上的拥挤距离,为前一个染色体与后一个染色体在该目标函数值上之差;而该染色体的拥挤距离为该染色体在所有目标函数上对应的拥挤距离的总和[7]。
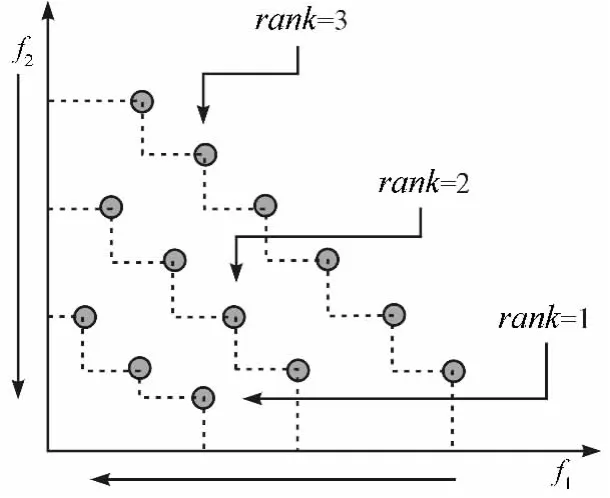
图1 非占优排序
2.2 约束的处理
对于约束的处理,传统的方法是采用惩罚方法。该方法的基本思想是设法对个体违背约束条件的情况给予惩罚,并将该惩罚体现在适应度函数设计中[8]。针对多目标多约束优化问题,本研究采用基于拥挤距离的非占优排序的方法,方法如下:
首先,定义解的约束违反量:

式中:δ—所允许的误差值。
然后,计算总的约束违反量,计算公式为:

最后,根据两个解的约束违法总量和目标函数值进行占优排序。遵循的规则是:
(1)(φ(x1)=0∧φ(x2)=0)∧(f(x1)<f(x2))⇒x1≺x2
<表示占优;即当两个解都满足约束时,目标函数值小的占优;
(2)(φ(x1)=0∧φ(x2)>0)⇒x1≺x2;即当一个满足约束,而另一个解不满足约束时,满足约束的解占优;
(3)(φ(x1)>0∧φ(x2)>0)∧(φ(x1)<φ(x2))⇒x1≺x2;即当两个解都不满足约束时,约束违反量小的占优。
2.3 离散变量、整数变量的处理
在一些多目标优化问题中,变量并不都是连续的,可能存在离散变量和整数变量。如在齿轮减速器的齿数是整数变量,模数是离散变量。初始化之后产生的父代和交叉变异之后产生的子代,它们的变量的取值很可能不是可选的值,因此需要对这些变量进行处理。
(1)处理整数变量的方法是:

即采用随机的方式,对整数变量的数值进行向上取整,或者向下取整。例如,某个整数变量初始化后的结果是20.2,取整的结果可能是20也可能是21,概率都是0.5。
(2)处理含非整数的离散变量,将离散变量的数值与所有可能取到的值放到一起进行排序,以随机的方式选择排序在前一位的数值还是后一位的数值。例如,某齿轮的模数可取的值为 2、2.5、3、3.5、4、4.5、5,在初始化后,如果值在4~4.5之间,处理的结果可能是4也可能是4.5,概率都是0.5。数学表达为:
如果4<xi<4.5,则:

3 二级减速器的优化设计
由于齿轮的齿数是整数,模数是标准值,减速器的多目标优化设计,就是一个有约束的、有离散变量的多目标优化问题,本研究以二级斜齿轮减速器的优化设计为例来验证所提方法是否可行。
3.1 建立多目标优化模型
本研究首先选择合适的设计变量,然后建立目标函数,最后确定约束条件。
3.1.1 选择设计变量
二级齿轮减速器的主体部分是两对齿轮,选择高速级的传动比,小齿轮的模数、齿数、齿宽、螺旋角,作为设计变量。

式中:m1,m2—离散变量;z1,z2—离散的整数变量,其他5个变量是连续变量。
3.1.2 建立目标函数
(1)减速器的体积:

(2)减速器的可靠性。为了将目标统一为了取最小值,目标函数为减速器失效概率:

其中:
式中:[σ]H—齿轮齿面的接触疲劳强度极限,T—输入转矩,K—载荷系数。
(3)减速器的转角误差:

式中:i—总传动比,round()—四舍五入成整数的操作,n1—高速轴的转速。
3.1.3 确定约束条件
约束条件主要有齿面接触疲劳强度条件、弯曲疲劳强度条件、大齿轮的最大浸油深度条件等[9-10]。(1)高速轴齿轮的接触疲劳强度条件为:

(2)低速的轴齿轮的接触疲劳强度条件为:

(3)高速轴齿轮的弯曲疲劳强度条件:

(4)低速的轴齿轮的弯曲疲劳强度条件为:

(5)大齿轮的最大浸油深度条件为:

(6)高速级的大齿轮不与轴干涉的条件为:

(7)设计变量的取值范围:
式中:Z—应力系数,[σ]F—齿轮齿面的弯曲疲劳强度极限,Y1—齿形系数,Y2—螺旋角系数。
3.2 多目标优化求解
某二级斜齿轮减速器的设计条件为:高速轴输入功率P=6.2 kW;高速轴转速n=1 450 r/min;总传动比i=24;大齿轮材料为45钢,正火HB187-207;小齿轮材料为45钢,调质HB228-255。
本研究运用NSGAII对二级斜齿轮减速器的多目标优化模型进行优化求解,选择初始种群数目为400,迭代次数为200,使用Matlab2010b运行程序,得到结果如图2所示。从图2中可看出,优化结果是一个三维的曲面,这是因为体积、失效概率和转角误差三者之间相互制约,从而得到帕累托曲面。

图2 减速器多目标优化求解结果
为了能够更好地观察,现将这个三维的图像投影成二维图像,失效概率与体积如图3所示。从图3中可以很清楚地看到,体积与失效概率的二维图像是一条光滑的曲线,这是因为体积和失效概率是相互制约的,从而得到帕累托曲线。
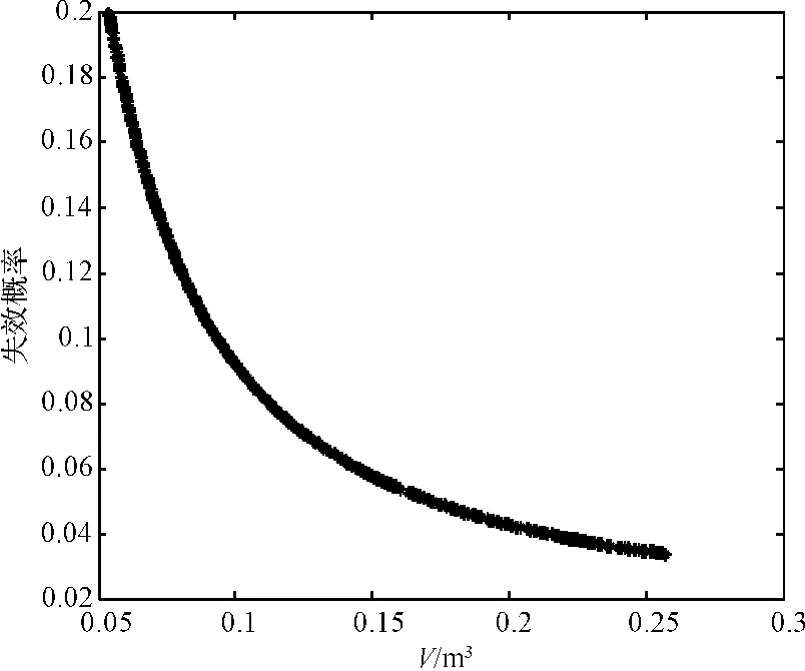
图3 失效概率与体积
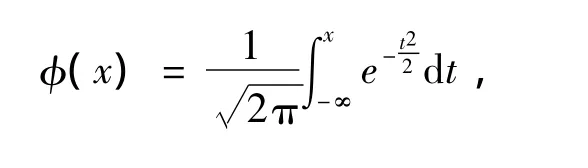
帕累托前沿中的解互不占优,根据目标重要程度,可以基于不同的准则,选择不同的满意解。本研究根据模糊集合理论的有关方法选取最优解。首先计算某个解在某个优化目标上,其目标函数值所占的比重,计算公式为:
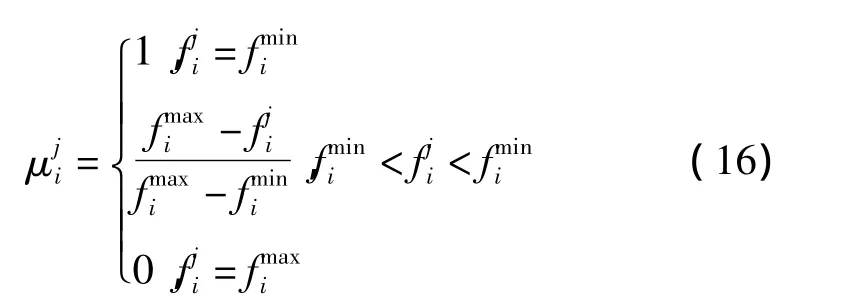
然后计算各个解在所有目标上所占的综合比重。定义占优函数μi为某个解在所有目标上所占的综合比重。占优函数值μi是一个居于0~1之间的数。占优函数值μi越大,表明对其评价的级别越高,亦即在客观评价上用户对此解更满意,其计算公式为:
通过计算求得最优解的目标值为:f1=0.060 5;f2=0.072 2;f3=0.031
各个参数值为:m1=5;z1=32;b1=21.46;β1=6.186 7;i1=6.48;m2=10;z2=25;b2=32.52;β2=13.900 0。
3.3 优化结果比较分析
一般对离散变量的处理是先把变量当成连续变量进行求解,然后再对模数、齿数进行圆整处理。为了方便比较,本研究采用传统方法进行求解,即先把离散变量当作连续变量求解,然后对求解结果进行标准化或者取整[11]。处理前的结果、处理后的结果以及本研究求解的结果如表1所示。
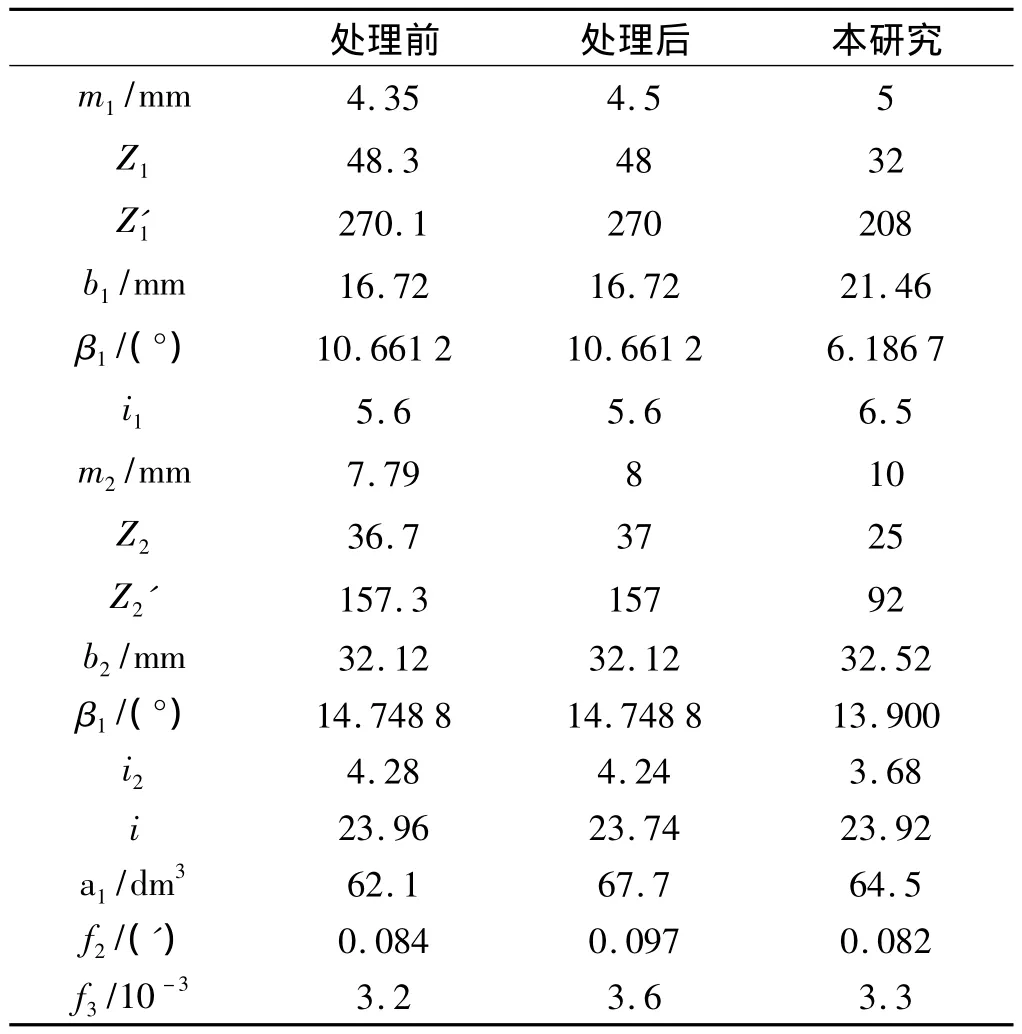
表1 优化结果比较
从表1中可以看出,采用传统方法得到了很好的优化结果,但是模数不是标准值,齿数不是整数,并不能满足工程需求,因此需要对模数取标准值,齿数取整数,然而经过处理之后,目标函数值都有不同程度的增加,优化效果有所降低。处理前、后对比,体积增加了9%;失效概率增加了15.5%;传动误差增加了12.5%,这是因为这些参数都是相互关联的、相互制约的,人为地分成两个步骤进行优化求解,难以保证优化结果最优。
本研究在非占优排序的时候就对离散变量进行处理,不符合要求的个体不会遗传到下一代,保证了离散变量的值都是满足要求的值。本研究方法求解的结果与传统方法求解的结果相比,体积减少了4.7%;失效概率减少了15.5%;传动误差减少了8.3%。可以看出,优化结果更合理,而且减少了步骤,更有效率,更符合实际需求。因此,改进的非占优排序遗传算法能够很好地求解有离散变量、有约束的多目标优化问题。
4 结束语
针对有离散变量、多约束的多目标优化问题,本研究提出了离散变量和多约束的处理方法,并以减速器的优化设计为例,将优化结果与传统方法的结果进行比较,来验证该方法的有效性。
研究结果表明:该方法能很好地解决该类问题,有效地提升优化效果。
本研究采用的例子较为简单,只有3个目标函数,9个变量,7个约束条件,然而有些优化问题复杂得多,有几十甚至几百个变量和约束条件,此时,运用该方法求解能否取得良好的结果还有待进一步的研究和验证。
[1] 肖晓伟,肖 迪,林锦国,等.多目标优化问题的研究概述[J].计算机应用研究,2011,28(3):806-807.
[2] 宁晓斌,姜 健,谢伟东,等.基于汽车悬架的多目标优化方法的研究[J].机电工程,2011,28(2):166-168.
[3] ABIDO M A.Multi-objective evolutionary algorithms for electric power dispatch problem[J].IEEE Transactions on Evolutionary Computation,2006,10(3):315-329.
[4] 钱伟懿,李阿军,杨宁宁.基于混沌的多目标粒子群优化算法[J].计算机工程与设计,2008,29(18):4794-4800.
[5] DEB K,PRATAP A,AGARWAL S.A fast and elitist multi-objective genetic algorithm:NSGA-II[J].IEEE Transactions on Evolutionary Computation,2002,6(2):82-197.
[6] 王克喜.大规模定制下参数化产品族多目标智能优化方法与应用[D].长沙:湖南大学工商管理学院,2010:34-35.
[7] MITRA K,GOPINATH R.Multi-objective optimization of an industrial grinding operation using elitist nondominated sorting genetic algorithm[J].Chemical Engineering Science,2004,59(2):385-396.
[8] 陈国良,王煦法,庄镇泉,等.遗传算法及其应用[M].北京:人民邮电出版社,2001.
[9] RUI Li,TIAN Chang.Multi-objective optimization design of gear reducer base on adaptive genetic algorithm[J].IEEE Transactions on Systems,2008,6(1):229-234.
[10] 张 凯,蒋玲玲,刘梦迪.基于有限元法的减速器齿轮轴校核[J].轻工机械,2013,31(3):72-74.
[11] 高玉根,王国彪,丁予展.斜齿轮减速器遗传算法的优化设计[J].起重运输机械,2003,8(1):19.