Pattern时延差编码水声定位的时延估计研究
2014-05-12吴永清邬松许枫
吴永清,邬松,许枫
Pattern时延差编码水声定位的时延估计研究
吴永清,邬松,许枫
(中国科学院声学研究所,北京 100190)
基于Pattern时延编码体制,针对水下超短基线定位系统设计了呼叫信号的正、负调频时延编码结构,并提出利用二次互相关技术进行时延估计。该方法在一定程度上能够提高呼叫方的可检测信噪比,同时在复杂环境下对信道中包括直达波在内的多径信号能量进行累加,能够准确地完成峰值检测,进而达到提高时延估计精度的目的。海试实验结果表明二次相关法在不同信噪比条件下能有效地抑制界面反射产生的多径干扰。
二次互相关;Pattern时延编码;水声定位
0 引言
时延估计技术是伴随着跟踪定位技术的发展脱颖而出的,其估计精度是影响水声定位系统精度的决定性因素之一。根据不同要求,时延估计有不同的方法,主要包括相关估计法、参数估计法、高阶统计法等等[1,2]。其中以互相关法算法简单、计算量小、易于实现从而得到了广泛应用。然而,互相关时延估计法的时间分辨率与信号带宽近似成反比,因此为了获得高精度的时延估计必须采用宽带的发射信号。
另外,由于界面反射的影响,信号在信道中是多径传播的,接收信号除直达声外还包含多次反射声,脉冲结构复杂。直达脉冲的时延值是定位系统中的重要信息,一方面,直达测距脉冲的选取直接影响到目标定位;另一方面,测距、测深脉冲间距代表目标的深度信息。因此,能否从脉冲序列中正确地选择直达测距、测深脉冲,对于定位精度和测深精度是十分关键的[3]。基于上述问题,本文在Pattern时延差编码体制下提出了一种基于水下超短基线定位的二次相关时延估计方法。
1 Pattern时延差编码
Pattern时延差编码(Pattern Time Delay Shift Coding, PTDS)通信体制是由哈尔滨工程大学在上世纪90年代提出的[4],该体制属于脉位编码(Pulse Position Modulation,PPM)。PTDS通信体制的信息并非调制在码元波形中,而是调制于Pattern码出现在码元窗的时延差信息中,不同的时延差值代表不同的信息,图1为Pattern时延差编码示意图[5]。
图1中给出了一组码元结构,包含个相关性优良的Pattern码,其中τ(=1,2,3,……)表示时延差值,是Pattern码出现在码元窗的位置;T表示Pattern码脉宽;T表示编码时间;码元宽度0=T+T。PTDS体制的每个码元占空比为=T/0,其值小于1。

图1 Pattern时延差编码示意图
超短基线中应答器的深度信息由压力传感器获得,基于PTDS通信体制在应答信号中通过时延编码的方式将深度信息发送给呼叫端[6]。为了减小多途信道下回波信号叠加造成的干扰,选取互相关系数小的正、负调频线性调频脉冲(PLFM、NLFM)。发送信号由三部分组成,分别是同步脉冲、PLFM,NLFM,其中PLFM、NLFM脉冲之间的时延间隔包含了应答器的深度信息,如图2所示。

图2 应答信号的组成
采用射线声学的观点,声信号沿不同途径的声线到达接收点,总的接收信号是通过接收点的所有各声线所传送信号的干涉叠加。多途信道的冲激响应函数()为[7]

式中:A为声波沿第条传播途径到达接收点本征声线的声压幅度;i为声波沿第条传播途径到达接收点本征声线的相对时延;为通过接收点对声场有贡献本征声线的数目。那么呼叫方经截取后的正调频接收信号表达式为

同样,负调频接收信号表达式为

接收信号与其发射信号复本的相关结果为

图3 正调频接收信号的一次相关处理流程图

2 二次相关


可以看出,式(7)中的第一项为多途结构中不同声线能量累加的相关峰,它明显大于第二项中不同声线之间交叉相乘的累积值。

图4 二次相关处理流程图
3 实验结果
为了验证二次相关的可行性,在某海域进行了海试,实验海区水深为40 m。由小艇吊放应答器由近至远航行。应答器发射信号中心频率为14 kHz,正、负调频脉冲带宽分别为8 kHz,定位超短基线采样频率为72 kHz。
图5给出小艇距离母船600 m时超短基线中水听器接收到的应答器信号及其处理结果,其中图5(a)为接收信号的时域波形,前后两个脉冲信号分别是正、负调频脉冲,可以看出接收信号具有较高的信噪比,图5(b)、5(c)分别为正、负调频与发射复本进行一次相关后的结果,从图中可以很明显看出,在400点和5400点前后出现有两个相关峰,可以通过应答器的深度推定这是由于水面反射造成的回波,这对判断相关峰的位置造成了困难,以至于无法获得准确的时延估计。图5(d)是二次相关的结果,可看出多径能量累加后得到明显的相关峰。
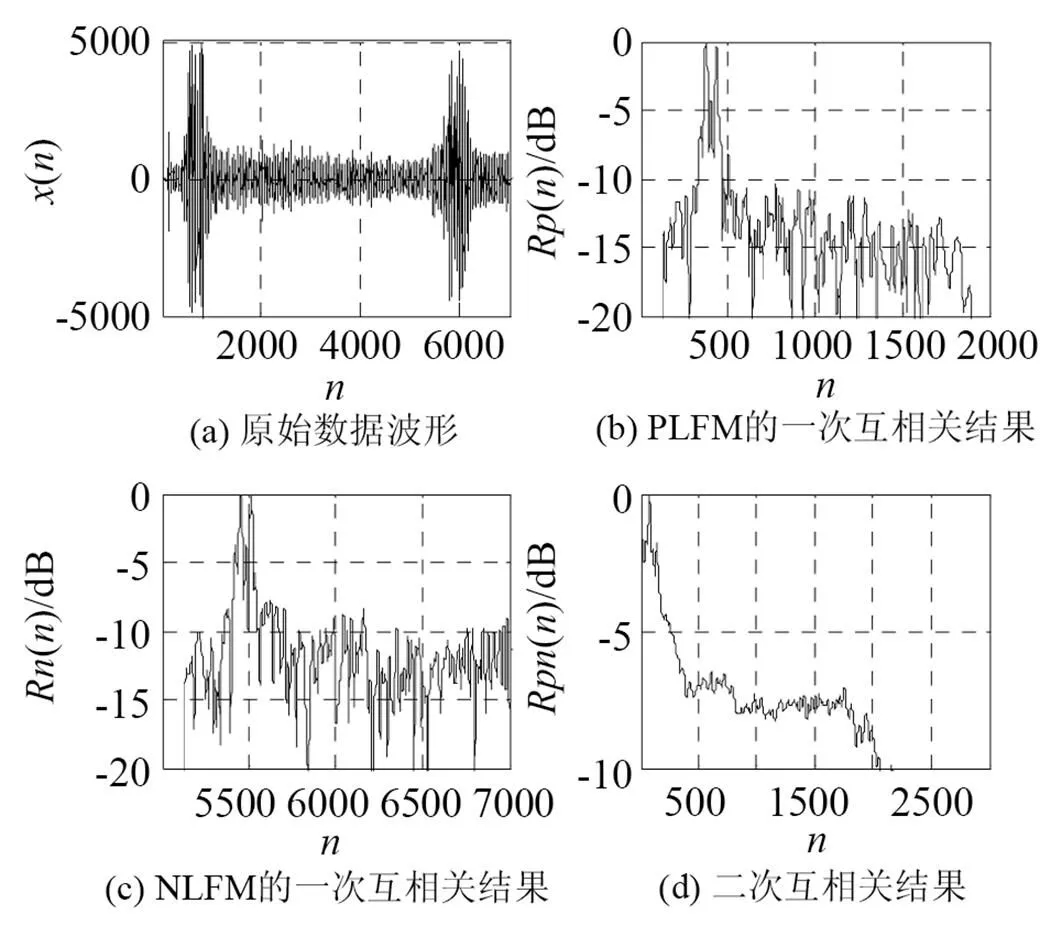
图5 离母船600m时,原始数据波形及其一次互相关结果和二次互相关结果
图6、7为离母船1000 m、1190 m时接收的数据波形及互相关结果。
随着小艇拖动应答器远去,从图6(a)中的时域波形可以明显看出,与图5(a)相比信噪比下降了很多。同时在图6(b)、6(c)正、负调频脉冲相关结果也能看出,直达波的相关峰甚至已经低于界面反射的相关峰。此时不管多么复杂的峰选机制,也是很难准确地完成相关峰判别的,然而在图6(d)中二次相关后的结果中仍能看到明确的相关峰,这也使得峰值检测变得简单了。当小艇距离母船1190 m时,随着接收信噪比下降,图7(a)的时域波形已经很难看出调频脉冲了,而图7(b)二次相关后的结果仍能很稳定地获得Pattern时延编码的脉冲间隔。

图6 离母船1000m时,原始数据波形及其一次互相关结果和二次互相关结果
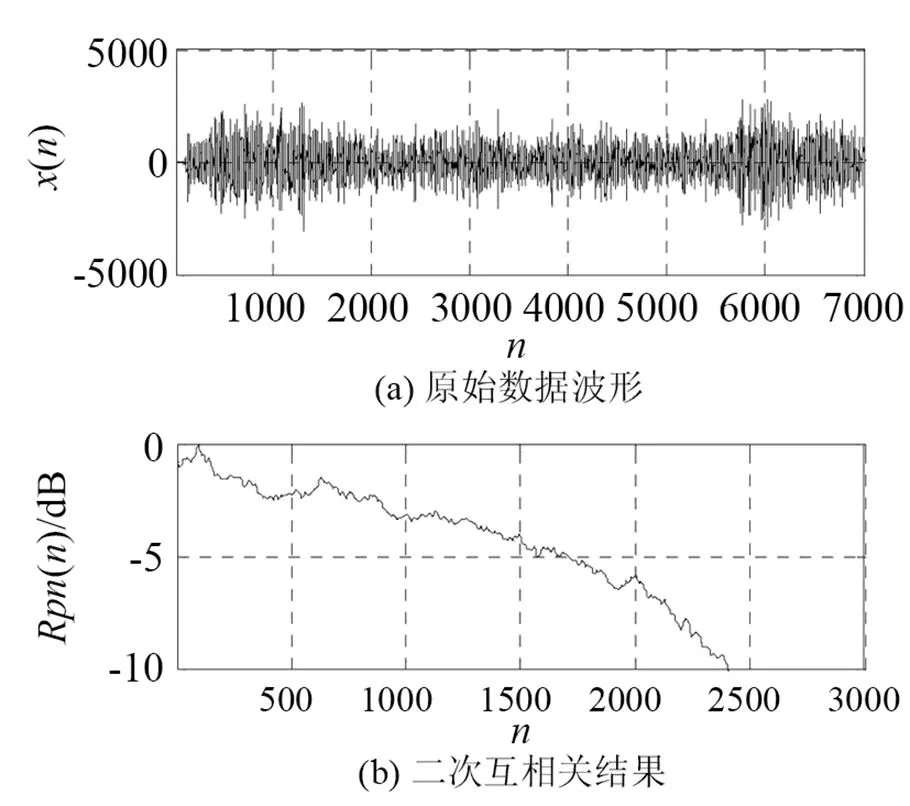
图7 离母船距离1190m时,原始数据波形及其二次互相关结果
4 结论
在超短基线水声定位中,应答器信号的后置处理通常采用匹配滤波的方法,然而在复杂多途环境下难以判断准确的相关峰,这就无法获得高精度的时延估计。基于Pattern时延编码体制,本文设计了正、负调频的时延编码结构,并提出二次互相关技术完成时延估计。该方法可以在一定程度上能够提高呼叫方的可检测信噪比,同时在复杂环境下对信道中包括直达波在内的多径信号能量进行累加,由于正、负调频脉冲的一次相关结果分别都体现信道中相同的多径结构,使得二次互相关后能够获得单一的相关峰值,进而可以准确地完成峰值检测,以达到提高时延估计精度的目的。同时,该方法简单易懂,容易实现,在实际应用中有一定的应用价值。
[1] 唐娟, 行鸿彦. 基于二次相关的时延估计方法[J]. 计算机工程, 2007, 33(21): 265- 267.
TANG Juan, XING Hongyan. Time delay estimation based on second correlation[J]. Computer Engineering, 2007, 33(21): 265-267.
[2] Knapp C H, Cater G C. The generalized correlation method for estimation of time delay[J]. IEEE Tram on Acoustic, Speech, Signal Processing, 1976, 24(8): 320-327.
[3] Quazi A H. An overview on the time delay estimation in active and passive systems for target localization[J]. IEEE Trans. Acoust. Speech and Signal Processing. 1981, 29(3): 527-533.
[4] 惠俊英, 生雪莉. 水下声信道[M]. 2版. 北京: 国防工业出版社, 1992.
HUI Junying, SHENG Xueli. Underwater acoustic channel[M]. Second Edition. Beijing: National Defense Industrial Press, 1992.
[5] 殷敬伟. 多途信道中Pattern时延差编码水声通信研究[D]. 哈尔滨: 哈尔滨上程大学. 2007.
YIN Jingwei. A study of pattern time delay shift coding communication in underwater acoustic multipath channel[D]. Harbin: Harbin Engineering University, 2007.
[6] Milne P H. Underwater Acoustic Positioning System[M]. London: E.F.N.Spon, 1983.
[7] Urick R J. Priciples of underwater sound for engineering[M]. McGraw-Hill Press Corp, 1967.
Research on time delay estimation in underwater positioning of pattern time delay shift coding system
WU Yong-qing, WU Song, XU Feng
(Institute of Acoustics, Chinese Academy of Sciences, Beijing 100190, China)
Based on pattern time delay shift coding regime, the structure of positive and negative frequency modulation calling pulses of underwater ultra-short base line acoustic positioning system is given, and a second correlation method of time delay estimation is proposed in this paper. As the second correlation method improves the detectable signal-to-noise ratio of calling end to certain extent, it could accumulate the energies of multipath reflections including the direct wave effectively in the complex underwater channel environment, so as to achieve the peak detection accurately and to improve the accuracy of time delay estimation. The sea trial results show that the second correlation method could suppress the multipath interference from interface reflections under different signal-to-noise ratios efficiently.
the second correlation; pattern time delay shift coding; underwater acoustic positioning
TB556
A
1000-3630(2014)-03-0189-04
10.3969/j.issn1000-3630.2014.03.001
2013-01-12;
2013-04-17
国家自然科学基金(61372181)、国防预研项目(513220505)资助项目。
吴永清(1968-), 男, 浙江青田人, 博士, 研究员, 研究方向为水声信号处理。
吴永清, E-mail: wyq@mail.ioa.ac.cn
