基于SVPWM的永磁同步电机直接转矩控制系统的建模与仿真
2014-05-11史晓永王步来陈雪琴
史晓永,王步来,陈雪琴,高 响
(上海海事大学,上海201306)
1 直接转矩控制的基本思想
对电机的统一转矩公式进行推导,可得永磁同步电机在M-T坐标系中的转矩方程为:

式中,p为电机的极对数;|Ψs|为定子磁链的幅值;isT为定子电流在T轴的分量。此式表明如果保持定子磁链幅|Ψs|恒定,则永磁同步电机的电磁转矩Te与M-T坐标系中定子电流在T轴上的分量isT成正比。对于隐极式PMSM,定子电感有Ld=Lq=Ls的关系,则M-T坐标系中的定子磁链可以表示为

由于永磁同步电机转子磁链的幅值Ψs可视为常数,根据式(2)可知,若保持定子磁链幅值Ψs恒定,则电机的转矩因转矩角的变化而变化,即永磁同步电机的电磁转矩与sinδ成正比。因为电机的机械时间常数远大于电机的电气时间常数,即电机定子磁链的旋转速度相对转子旋转速度而言更容易改变,所以转矩角的改变可以通过改变定子磁链的旋转速度和方向实现。综上所述,永磁同步电机直接转矩控制的理论基础为:通过控制定子磁链幅值保持恒定,改变定子磁链的旋转速度和方向来瞬时调整转矩角δ,就能够实现电磁转矩的动态控制,这也是直接转矩控制的基本思想。
2 基于SVPWM的直接转矩控制系统
基于SVPWM的永磁同步电机直接转矩控制系统框图如图1所示,其中参考电压空间矢量Us估计器和SVPWM单元替代了传统控制方式中的定子磁链、电磁转矩滞环控制环节和开关表。

图1 基于SVPWM的PMSM DTC系统结构框图
2.1 Us估计单元
通过对永磁同步电机各磁链矢量及电压矢量之间的关系进行分析,可得参考电压空间矢量Us的幅值和角位置公式如下

2.2 定子磁链矢量的动态控制
在基于SVPWM的永磁同步电机直接转矩控制系统中不同磁链矢量之间的关系如图2所示。
图2描述了在一个采样周期中定子磁链的动态控制过程。根据上述的分析,基于SVPWM的永磁同步电机直接转矩控制的工作过程可以归纳如下:由测量所得逆变器和电机端部变量估算出定子磁链矢量和电磁转矩,采用估计器得出定子磁链、电磁转矩的误差,作为需要的参考空间电压矢量,再采用SVPWM单元对合成该参考空间电压矢量进行调制,将调制中生成的一系列开关信号送入逆变器,产生PWM,实现定子磁链和电磁转矩的准确、平滑控制。

图2 磁链矢量关系图
3 仿真分析
仿真用到的永磁同步电机参数设置为:额定PN=1.5 kW,极对数 np=4,定子电阻 Rs=1.3 Ω,电感 L=5.25 mH,定子磁链给定 Ψs=0.215 Wb,仿真时间T=0.1 s,给定转速1 200 r/min,负载转矩 5 N·m,0.05 s时转矩突变12 N·m。仿真模型如图3所示,仿真结果见图4~图6。

图3 仿真模型

图4 转矩波形
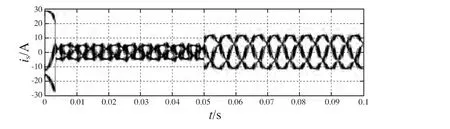
图5 定子电流波形
仿真结果表明:永磁同步电机直接转矩控制中引入SVPWM技术后,磁链和转矩脉动明显减小,且速度响应明显加快。这是由于传统的DTC系统釆用滞环控制器,每个周期选择一个幵关电压矢量,不能完全补偿转矩和磁链的误差;而后者采用PI控制器和SVPWM调制,可选择多个基本电压矢量来合成任意的电压矢量,能够更好地补偿误差。仿真结果说明,基于SVPWM的DTC系统在磁链幅值响应以及转矩响应上的改善效果很明显。

图6 转速波形
[1]黄永安.MATLAB 710/Simulink 610建模仿真开发与高级工程应用[M].北京:清华大学出版社,2009.
[2]袁登科.交流永磁电机变频调速系统[M].北京:机械工业出版社,2010.
[3]马小亮.高性能变频调速及其典型控制系统[M].北京:机械工业出版社,2011.
