分布式消磁系统控制系统实时性和同步性研究
2014-05-07李玉生袁阳耿攀左超
李玉生,袁阳,耿攀,左超
分布式消磁系统控制系统实时性和同步性研究
李玉生1,袁阳1,耿攀2,左超2
( 1.海军驻431厂军事代表室,武汉 430064;2.武汉第二船舶设计研究所,武汉 430064)
为确保消磁系统技术指标的实现必须保证系统实时性和同步性。本文介绍了一种含时间向量的数据信息传输与处理的CAN总线顶层标准框架,本协议应用于分布式消磁系统,能够确保各分区消磁绕组所产生的磁场同步性;分析了消磁系统响应延时的原因,针对原因提出措施能够确保消磁系统的实时性。
分布式消磁系统 同步 CAN总线
0 引言
随着现代大型舰船吨位、总体尺寸的日益增大,传统中、小型舰船的消磁系统已无法适应其磁场量值的增大和分布情况的复杂化,分布式消磁系统日益成为现代大型舰船消磁系统的发展方向。该系统不仅能减轻消磁系统的重量、提高消磁系统的可靠性和可维修性,还能适应舰船分段建造要求。
然而,舰船采用分布式消磁系统后,相比传统集中式消磁系统,系统对各个消磁绕组控制的实时性和同步性提出了更高的要求,须采取措施保证消磁系统实时性,减小系统延时,才能确保消磁绕组产生的补偿磁场与舰船的姿态和位置一致,同时还须采取措施来保证分布式消磁系统中各消磁电源的电流指令的时间同步性,以确保各分区消磁绕组所产生的磁场同步。
1 分布式消磁系统的实时性分析
舰船消磁采用地磁解算控制模式,控制流程图如图1所示。导航系统将舰船的经纬度、航向和姿态信息通过以太网发给消磁电流控制仪,消磁电流控制仪进行地磁解算和控制指令计算,并将控制指令通过CAN网发送给消磁电源,消磁电源接收指令,并根据指令调整输出电流给消磁绕组供电,消磁绕组产生补偿磁场。
由于在整个过程中舰船是出于运动状态,必须减小各环节的延时,尽可能保证消磁绕组输出的补偿磁场与舰船当前位置和姿态一致。
在整个消磁控制流程中有五个环节会产生延时,具体如下:
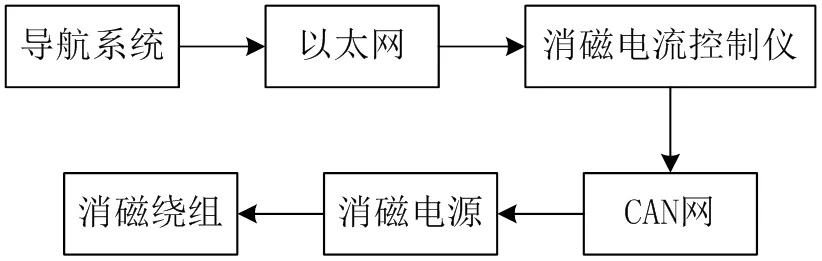
图1 消磁系统控制流程图
1)以太网传输延时,包括网络传输延时1,导航系统发送导航信息间隔2,网络堵塞延时3,其中1和2是可估的,3是随机的,可通过降低网络负载来优化避免。
2)消磁电流控制仪解算延时,首先无论消磁电流控制仪接收导航信息采用查询模式或者中断模式,都会产生延时4,查询方式产生的延时大于中断模式产生的延时;其次,控制器内部进行地磁解算和控制电流换算会产生延时5;最后将控制指令发送给CAN网会产生延时6,其中控制指令的帧数越多,6越大,根据指令帧数估算6可达约1ms。
3)CAN网传输延时,包括网络传输延时7,导航系统发送导航信息间隔8,网络堵塞延时9,与以太网类似7和8是可估的,9是随机的,需要从设计上尽量避免的。
4)消磁电源电力电子变换环节延时,包括CAN指令接收延时10;直流侧滤波电路产生延时11,接收指令后PI控制器产生的延时12;输出电流和负载电流检测回路有前置低通滤波器,来对高频分量进行衰减,低通滤波器在滤除高频分量的同时会引起检测信号相位的滞后延时13;负载电流和输出电流信号经过AD转换,采样延迟一个采样周期14;电流电压信号经调节器产生指令,但是在DSP中进行调制波和载波交截比较产生占空比信号时,会产生滞后一拍的延时15。
5)消磁绕组产生的补偿延时,消磁绕组敷设在壳体内或壳体外,可以等效为一个电感,消磁绕组的电流变化将因为消磁绕组的等效电感产生一个延时16。
总延时delay为:
假设舰船以20°/s变化速率水平回转,在消磁绕组稳态补偿误差为0,为确保补偿误差小于1%,求解最大总延时tdelay。


考虑导航信息更新率为50次/s,即导航系统发送导航信息间隔2=20 ms,则除去2后delay允许延时余量为8.7 ms,所以在余下各个导致系统延时的环节都必须采取措施严格控制延时时间。须采取针对性措施,应将系统延时控制在25 ms范围内,从而保证系统的实时性要求。针对以上分析的延时环节,可采取的措施如下:
1)以太网和CAN网环节,提高CAN网传送波特率减少传送延时,提高网络冗余量以避免堵塞。
2)消磁电流控制仪环节,采用中断方式接收导航信息,简化地磁解算算法和控制算法,提高地磁解算算法和控制算法程序效率,提高采用的嵌入式控制芯片的主频。
3)消磁电源环节,采用状态观测器和双环控制提高设备动态响应性能,采用主频更高的DSP控制芯片,提高消磁电源开关频率,在满足滤波效果的前提下,减小输出滤波环节产生的延时,采用中断方式接收系统指令。
4)消磁绕组环节,采用分步式消磁系统结构替代集中式结构,采用分步式消磁系统后消磁绕组分别由各消磁电源分别供电,各消磁绕组电感量不大。传统的集中式消磁系统结构,全船纵向绕组、横向绕组和垂向绕组分别串联,全船纵向绕组的等效电感约100 mH,除造成响应滞后外,还对消磁电源的安全可靠性造成影响。
2 分布式消磁系统的时间同步要求
分区消磁的同步技术实际上就是各分区输出电流的同步问题。消磁系统采用n个消磁电源模块分别为n个消磁绕组供电,由于各消磁电源中串入的电感远较各分区消磁绕组电感值大,加之各分区消磁绕组电容的影响,致使各分区之间因消磁绕组电感差别对各区时间常数的影响很小,由于各消磁电源收到控制指令到输出电流延迟是一致的,因此只要保证各分区控制指令同步的,即能够保证各分区消磁电源输出电流同步,从而保证各消磁绕组产生补偿磁场同步。
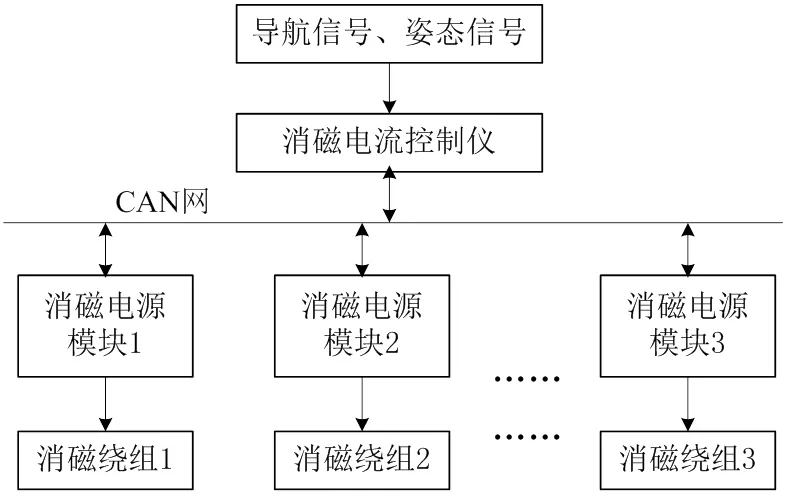
图2 基于CAN总线的消磁系统结构示意图
基于CAN总线结构的分布式消磁系统控制结构如图2所示,消磁电流控制仪通过CAN网向n个消磁电源模块下发控制指令,n个消磁电源模块通过CAN网向消磁电流控制仪发送各消磁电源电压、电流等工作状态信息。控制系统采用何种通讯机制保证n个模块的控制指令实时性,是分布式消磁系统的一个关键技术。
3 消磁系统CAN总线同步控制设计
分布式消磁系统CAN网采用CAN 2.0B协议标准,根据整个网络数据帧延时要求,通讯波特率设定为250 kbps,通讯数据格式低字节在前,高字节在后。假设分布式消磁系统由1台消磁电流控制仪控制M台消磁电源,同时由M台消磁电源给N套消磁绕组供电。消磁电流控制仪需要向M台消磁电源发送总起停指令,每台消磁电源(共M台)的起停指令,每套绕组(共N套)所需电流指令(每套绕组的电流指令送至消磁电源的监控单元,然后监控单元将指令处理后分发给消磁电源内部的电源模块)。
在每台消磁电源中,各消磁电源模块将各自输出电压、电流信号,工作、停机、故障信号(故障信号包括:短路、输出过载、过温、输入欠压、输出过压)发送至电源监控单元,监控单元将信息汇总再反馈信息给消磁电流控制仪,包括每组电源的输出电压、电流信号(即对应某套绕组的电压、电流),工作、停机、故障信号(故障信号包括:短路、输出过载、过温、输入欠压、输出过压)。
基于上述的通讯协议和要求,本文借鉴TTCAN时间触发机制特点,针对消磁系统实时控制需求和传输大量数据的需要,根据CAN的底层协议,采用数字分布系统时间同步总线协议完成了消磁系统的CAN网络协议编制。图3给出基于CAN总线的消磁系统结构示意图。为了交换数据与同步时间,消磁电流控制仪作为授时单元为消磁电源等工作电源提供时间基准。消磁电源都嵌入了通讯单元,各通讯单元均包括一个24位的时间寄存器,用于保存工作时间。
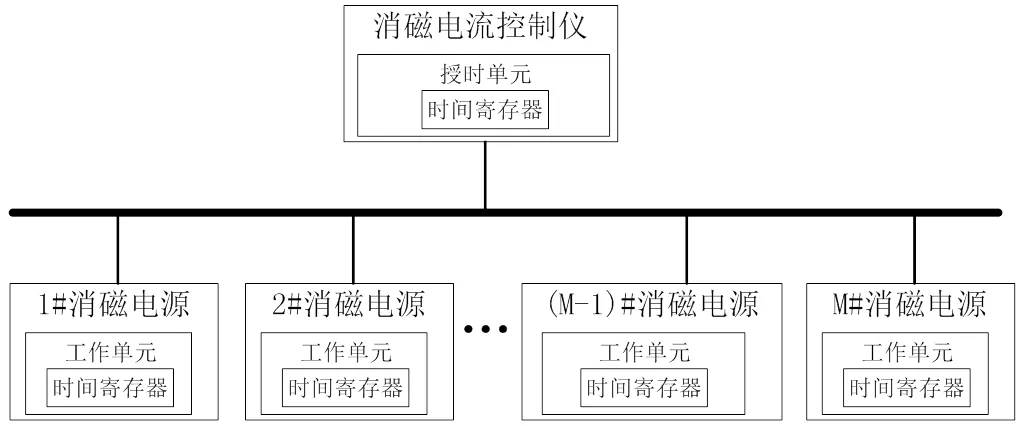
图3 基于CAN总线的消磁系统结构示意图
1)消磁系统CAN总线协议数据帧
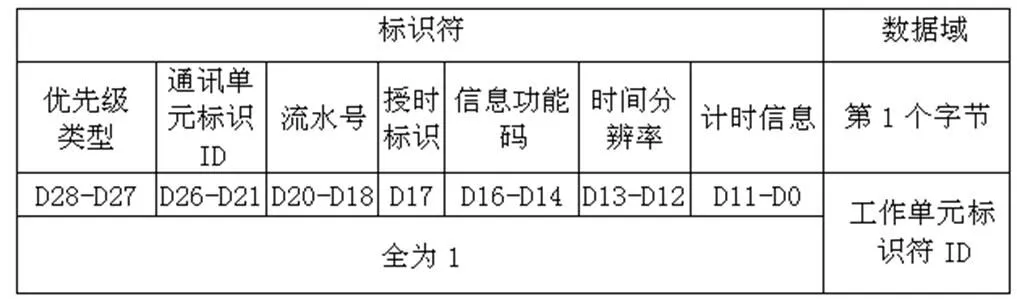
消磁系统CAN网协议采用CAN数据帧扩展帧来完成所述通讯功能。本协议将扩展帧的29位标识符的分配格式如表1所示,数据帧包含优先级类型、通讯单元标识ID、流水号、授时标识、信息功能码、时间信息。
表1 数据帧ID结构示意图

2)消磁系统同步CAN总线协议流程
如图4所示,消磁电流控制仪作为授时单元工作时发送广播校时帧至各消磁电源工作单元,各消磁电源工作单元根据广播校时帧的时间信息校正各自的时间,保持与授时单元的时间同步。在时间同步的基础上,各消磁电源工作单元发送工况信息帧传送至消磁电流控制仪,消磁电流控制仪作为授时单元根据工况参数值决定是否发出相应的控制指令给各消磁电源工作单元。
消磁电流控制仪作为授时单元将其时间信息通过广播校时帧对全网广播以进行统一授时,广播校时帧包含仲裁域的29位标识符的格式如表2所示。优先级类型中00最高优先级,授时标识字段设置为0,表示为授时功能使能;信息功能码字段设置为100,表示该帧为校时帧。时间分辨率当置为00时表示时间细调,时间信息写入到其内部的时间寄存器的低12位。时间粗调与时间细调的周期可根据消磁系统的实时性要求作相应调整。
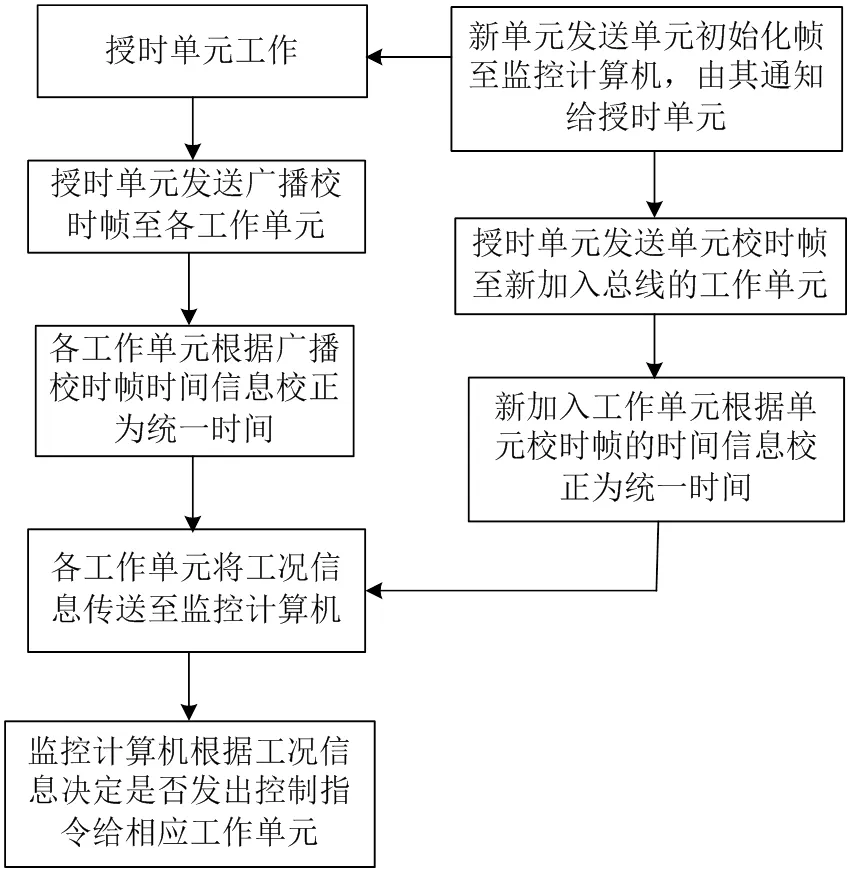
图4 总线协议时间同步流程
3)消磁系统CAN总线协议同步模式
a. 消磁系统CAN网广播同步模式
表2 广播校时帧

b. 消磁系统CAN网单元初始化同步
当有新的工作单元,如消磁电源、绝缘监测模块等加入到CAN总线上时,该工作单元首先发送单元初始化帧至消磁电流控制仪,该单元初始化帧包括仲裁域的29位标识符与数据域两部分,该单元初始化帧包括仲裁域的29位标识符与数据域两部分,该初始化帧的格式如表2所示,29位标识符全为1,该工作单元的标识符ID写入到数据域的从高位到低位的第一个字节,如表3所示。
表3 单元初始化帧
c. 消磁系统单元初始化同步校时
如表4所示,消磁电流控制仪接收到该单元初始化帧后将新工作单元的标识符ID和发送单元校时帧的指令通知给消磁电流仪授时单元。
d. 消磁系统单元信息传送模式
在广播校时或单元校时完成后,各消磁电源将自己的工况信息通过工况信息帧传送给消磁电流控制仪,该工况信息帧包括仲裁域的29位标识符与数据域两部分,其格式如表5所示。
表4 单元校时帧

表5 工况信息帧
4 结论
实时性和同步性对舰船分布式消磁系统技术指标的实现起到关键作用。舰船分布式消磁系统采用含时间向量的数据信息传输与处理的CAN总线顶层标准框架,可为全船现场单元提供一种时间向量的数据帧定义、同步和异步信息权限分配、可实现消磁系统BIT故障自诊断,保证控制指令和电源上传信息完整性和实时性;严格控制网络传输环节、消磁控制解算环节、消磁电源电力电子变换环节的响应延时;从实时性和同步性两个方面保证分布式消磁系统绕组磁场补偿精度。
[1] 胡文生. 中型舰船分区消磁系统设计应用浅析[J ]. 水雷战与舰船防护, 2010.
[2] 肖存龙,肖昌汉,李光磊. 分布式消磁系统绕组补偿电流快速调整[J ]. 海军工程大学学报, 2011.
[3] 唐申生, 周耀忠, 庄清华. 大型舰船分区消磁理论研究[J ] . 海军工程大学学报, 2003.
[4] 肖锦栋,费敏锐. CAN 现场总线性能评价[J ] . 上海大学学报(自然科学版) ,1997.
[5] 阳宪惠. 现场总线技术及其应用[M] . 北京:清华大学出版社,1999.
[6] 刘墩东,周文博.基于CAN总线的智能断路器控制器设计[J].厦门大学学报(自然科学版),2006,45(6):783-788.
[7] 李文华,李可维,余跃听,高原. 数字分布式系统时间同步CAN总线协议研究[J].舰船科学技术,2010.
Design of Synchronization and Real time in Ships Distributed Degaussing System
Li Yusheng1, Yuan Yang1, Geng Pan2, Zuo Chao2
(1. Naval Representatives Office in 431 Factory, Wuhan 430064, China; 2. Wuhan Second Ship Design and Research Institute, Wuhan 430064, China)
U665.18 TP273
A
1003-4862(2014)12-0005-04
2014-10-08
李玉生(1977- ),男,工程师。研究方向:电力系统。