风电机组独立变桨距控制策略研究
2014-05-06郭百顺李鹏程
郭百顺,秦 斌,邵 军,邱 丽,李鹏程
(湖南工业大学 电气与信息工程学院,湖南 株洲 412007)
风电机组独立变桨距控制策略研究
郭百顺,秦 斌,邵 军,邱 丽,李鹏程
(湖南工业大学 电气与信息工程学院,湖南 株洲 412007)
为了减小叶片不平衡载荷造成的风电机组疲劳,运用空气动力学原理对风轮扫掠面内风速受风切效应和塔影效应影响所产生的俯仰弯矩和偏航弯矩等附加载荷进行分析,提出了基于载荷反馈的风电机组独立变桨距控制策略。通过d-q坐标变换,将三相旋转坐标系转化为两相静止坐标系进行控制。通过Bladed半实物仿真平台验证该控制策略的合理性和可行性。
载荷反馈;独立变桨距控制;d-q变换;Bladed
0 引言
能源危机和环境变化已成为世界各国所面临的共同问题,它严重制约着人类的生存与发展。可再生能源的开发与利用成为全世界能源发展的战略目标。风能具有蕴藏量丰富、可再生、分布广、无污染等特性,是最具规模化开发潜力的新能源之一[1]。随着风电技术的发展,风电机组单机容量不断增大,风能利用效率和电能质量不断提高。风机变速变桨距控制已经成为世界风电发展的主流,通过独立变桨距控制来稳定发电机功率输出和减小机组动态载荷的控制策略,已成为学者们研究的热点。
由于风切变、塔影效应以及湍流等因素对风轮扫掠面的影响所引起的俯仰弯矩、偏航弯矩会加快机组的疲劳,直接导致机组的输出功率和叶片弯矩产生较大波动[2]。因此,本文提出基于载荷反馈独立变桨距的控制策略,来减小风电机组的不平衡载荷;同时以2MW级风力发电机组为平台,进行半实物仿真试验,通过Bladed软件模拟一定工况和载荷情况,从而验证该控制策略的合理性和可行性。
1 独立变桨距控制系统
1.1 电动变桨距系统
电动变桨距系统由回转轴承、减速装置和伺服电机等构成[3],通过叶片和轮毂之间的轴承机构,借助控制技术和动力系统带动叶片旋转来调节桨叶的迎风角,实现3个桨叶独立变桨。电动变桨距系统原理如图1所示。

图1 电动变桨距系统原理图Fig.1 Electric variable pitch system schematic diagram
1. 2 风扰动分布模型
由于地面摩擦力的存在,使得风速随高度的变化而变化。通常采用经验公式(1)来描述风速随高度的变化规律。

式中:V()为叶片中心上方 处风速;
Vhub为风力机叶片轴心处风速;
h为风力机叶片轴心高度;
m为经验指数,其取值取决于大气稳定度和地面粗糙度。
上风向水平轴式风力机结构示意图如图2所示。

图2 水平轴风力机结构示意图Fig.2 Horizontal axis wind turbine structure diagram
将式(1)按泰勒公式展开得
将 =-rsin带入式(2)并忽略余项得
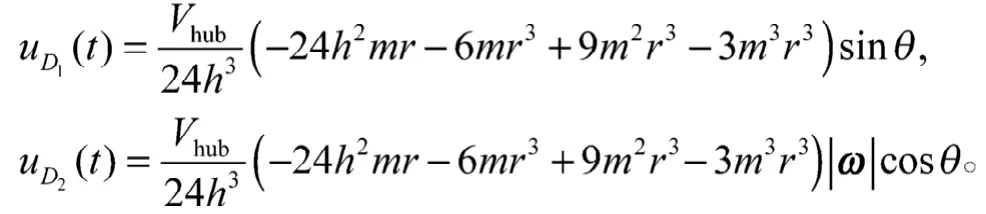
由式(4)可知,可变项中,-0.1056sin是主要项,其余项可忽略,所以可得
式(5)中右边第一项是代表风速的部分,不受方位角影响;第二项是代表方位角的部分,为了消除这个扰动成分,每个叶片需要通过独立变桨来进行调节。
1.3 风速变化对风轮载荷的影响
由于风切效应、塔影效应、湍流等因素的干扰,风轮和搭架等部件所产生的载荷,在时间和空间上是不均匀的,从而造成叶片挥舞方向的剧烈震荡。这种周期性的震荡使叶片的疲劳损坏程度增大,使用寿命减小。
风剪切是指风速随高度的增加而增加的变化规律,可表示为

式中:VH为距地面高度H处的风速;
VH0为距地面高度H0处的风速;
塔影效应是指塔架上游和下游对空气流的阻塞。对于上风向风力发电机,在塔影坐标系下,当某点垂直于风力机时,风轮旋转面的风速可以用公式(7)表示。
式中:Rt为塔架半径;
ht为塔架某点的塔架高度;
xt, yt为塔架坐标系下水平方向的2个坐标;
Y 为塔径修正因子。
2 独立变桨距线性状态空间建模
风力发电机组系统的线性化模型以状态方程表表示为[4]
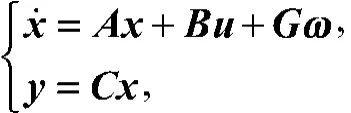
式中:A为状态变量x的系数矩阵;
B为输入u对状态关系的输入矩阵;
C为输出对状态关系的输出矩阵;
G为系数矩阵;
y为观测量。
由独立变桨距控制原理可得风力发电机组载荷控制系统线性状态空间模型为

式中:
3 独立变桨距控制器设计
基于载荷反馈的独立变桨距控制思路是,首先测量叶根弯矩,通过坐标换算为俯仰弯矩和偏航弯矩,然后将其作为反馈量来控制俯仰弯矩和偏航弯矩。这样,不论是周期性变化还是随机性变化,载荷的大小都能得到较好控制。桨片安装位置是固定的,每2个叶片在平面内相差120°,桨叶所受的载荷随着风轮旋转实时变化,因此通过控制的方法来使其受力平衡非常困难,且俯仰方向和偏航方向之间会产生耦合作用。为此将3个桨叶计算出来的弯矩应用d-q坐标进行变换[5],变换公式为
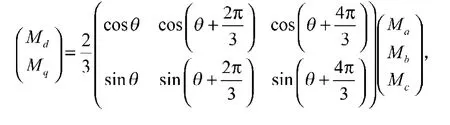
式中:Md, Mq分别表示俯仰弯矩和偏航弯矩;
Ma, Mb, Mc分别为3个桨叶的弯矩。
根据所得的俯仰弯矩和偏航弯矩,运用d-q逆变换将其转化为3个桨叶的桨距角需求。逆变换公式为

由于风速在风轮扫掠面内受到风切变、塔影效应、湍流等因素的影响,导致其分布不均匀,因而产生不平衡载荷。为此,首先使用统一变桨距得到桨距角的给定需求值,来保证稳定的输出功率;其次通过测量Ma, Mb, Mc的值并作为载荷控制的目标量进行d-q变换,得到俯仰弯矩和偏航弯矩,再经过d-q逆变换计算出各桨叶所需微调桨距角;最后将桨距角给定值和微调值之和作为风机3个桨叶桨距角控制量。本文采用PI(proportion integration)控制器进行设计,通过独立变桨距微调不同位置时3个桨叶的桨距角,从而减小桨叶所受的不平衡载荷。基于载荷反馈的控制器框图如图3所示。
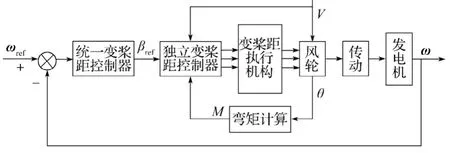
图3 载荷反馈控制器框图Fig.3 Load feedback controller block diagram
4 独立变桨距控制Bladed仿真
GH Bladed 是一个用于风机性能和载荷计算的集成化软件包,主要用于以下方面[6]:
1)风力机参数、风和载荷工况的定义;
2)稳态性能的快速计算,如性能参数、稳态运行载荷与稳态停机载荷等的计算;
3)动态模拟,如正常运行、启动、正常和紧急刹车、空转与停机等;
4)对计算结果后处理分析,如统计分析、频谱分析、极限载荷、闪变强度、雨流和疲劳分析;
5)报告的自动输出。
为验证上述设计和控制方法的有效性,本文利用Bladed半实物仿真平台分析工具,对一台2MW的SUT-2000风力发电机组进行仿真研究。机组主要参数为:风轮半径40m,轮毂高度61.5m,风轮仰角5°,风轮锥角-2°,切入风速4m/s,切出风速25m/s,额定风速12m/s,发电机额定转速1500r/min,机组额定功率2MW,齿轮箱传速比83.5,风轮转动惯量5.4×106kg·m2,风轮阻尼系数1000N·s·m-1,湍流强度12%,发电机转速范围1200~1800r/min。
基于载荷反馈的独立变桨距功率输出曲线见图4;独立变桨距和统一变桨距下的俯仰弯矩比较见图5;独立变桨距和统一变桨距下的偏航弯矩比较见图6。

图4 独立变桨距功率输出曲线Fig.4 Wind power output curve of independent variable pitch
从图4可以看出,采用载荷反馈独立变桨距控制后,风力发电机组的输出功率为2MW左右,上下波动幅度不超过5%,有稳定的输出功率。
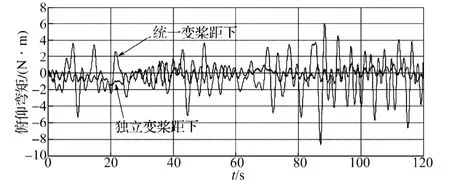
图5 俯仰弯矩的比较图Fig.5 The diagram of pitching moment comparison

图6 偏航弯矩的比较图Fig. 6 Theyaw moment comparisondiagram
从图5和图6可以看出,在统一变桨距下,叶根部弯矩的波动比独立变桨距下更大,对机组的冲击破坏也更大,使风电机组难以正常安全稳定地运行,不能保证对电能质量的要求,不利于并网。使用载荷反馈独立变桨距控制后,风轮所受的俯仰弯矩和偏航弯矩都明显减小,有效减小了桨叶的疲劳载荷,但是其动作频度有所增加,这会对变桨距传动机构提出更高的要求。但是从整体来看,在满足功率平稳输出的同时又能进一步减小桨叶受到的不平衡载荷,使得风电机组多方面性能都有所改善。
5 结语
对风电机组独立变桨距控制系统,通过载荷反馈建立线性化模型,采用d-q变换将3个桨叶的叶根弯矩变换为俯仰弯矩和偏航弯矩来进行控制,并用Bladed软件进行半实物仿真验证。结果表明,基于载荷反馈的独立变桨距控制策略在稳定输出功率的同时,有效减小了桨叶的疲劳载荷。
[1] 马晓岩. 兆瓦级风电机组独立变桨距控制系统研究[D].沈阳:沈阳工业大学,2011. Ma Xiaoyan. MW-Classic Wind Turbine Individual Pitch Control System Research[D]. Shenyang:Shenyang University of Technology,2011.
[2] 叶杭治. 风力发电机组的控制技术[M]. 北京:机械工业出版,2006:11-13. Ye Hangzhi. Control Technologies of Wind Turbine Generators[M]. Beijing:China Machine Press,2006:11-13.
[3] 姚兴佳,马 佳,郭庆鼎,等. 基于倾斜角权系数校正的风电机组变桨控制[J]. 电源学报,2012(1):54-59. Yao Xingjia,Ma Jia,Guo Qingding,et al. Pitch Control of Wind Turbine Based on Tilt Angle Weight Number Correction[J]. Journal of Power Supply,2012(1):54-59.
[4] 邱 丽,朱晓青,郭百顺. 改进的爬山算法在风电最大功率跟踪中的应用[J]. 湖南工业大学学报,2013,27(4):57-60. Qiu Li,Zhu Xiaoqing,Guo Baishun. Application of Improved Hill-Climbing Algorithm in Maximum Wind Energy Tracing[J]. Journal of Hunan University of Technology,2013,27(4):57-60.
[5] 林勇刚,李 伟,陈晓波,等. 大型风力发电机组独立桨叶控制系统[J]. 太阳能学报,2005,26(6):780-786. Lin Yonggang,Li Wei,Chen Xiaobo,et al. The Research on Large Scale Wind Turbine Individual Blade Pitch Control System[J]. Acta Energiae Solaris Sinica,2005, 26(6):780-786.
[6] 鲁效平,顾海港,林勇刚,等. 基于独立变桨距技术的风力发电机组载荷控制研究[J]. 太阳能学报,2011, 32 (11):1591-1598. Lu Xiaoping,Gu Haigang,Lin Yonggang,et al. Research on the Load Control of Wind Turbines Based on Individual Pitch Technology[J]. Acta Energiae Solaris Sinica,2011,32(11):1591-1598.
(责任编辑:邓光辉)
Research on the ControlStrategy of Independent Variable PitchofWind Turbine
Guo Baishun,Qin Bin,Shao Jun,Qiu Li,Li Pengcheng
(School of Electric and Information Engineering,Hunan University of Technology,Zhuzhou Hunan 412007,China)
In order to reduce the imbalance load resulting in fatigue of wind turbine, the pitch moment and yaw moment of the wind wheel swept surface caused by the wind shear characteristic and tower shadow effects were analyzed according to aerodynamics principle, and the independent variable pitch control strategy based on load feedback was presented. Through the d-q coordinate transformation, the three-phase rotation coordinate system is converted to twophase static coordinate system for the system control. The simulation results of Bladed semi-object test platform verify the rationality and feasibility of the control strategy.
load feedback;independent variable pitch control;d-q coordinate transformation;Bladed
TM315
A
1673-9833(2014)02-0042-04
2014-01-13
湖南省教育厅科学研究基金资助项目(09C338)
郭百顺(1988-),男,河南新乡人,湖南工业大学硕士生,主要研究方向为复杂过程建模及集成优化控制,
E-mail:guobaishu.a@163.com
10.3969/j.issn.1673-9833.2014.02.009
