静止轨道卫星东西位置保持控制参数的优化方法
2014-05-06高益军
尹 泉,高益军
(北京控制工程研究所,北京100190)
0 引言
对轨道要求严格的卫星,必须考虑轨道机动时姿态控制喷气和飞轮角动量卸载喷气对轨控效果的影响[1].
目前中国在轨使用的静止轨道卫星大部分处于多星共位状态,对其位置保持窗口的要求更加严格.例如,根据与外星签署的共位协议以及其他约束条件,共位卫星的偏心率圆控制半径由之前普遍的0.003 提高至1 ×10-4至7.5 ×10-4.GEO 导航卫星在速度增量较小时,设计了在东西位置期间使用飞轮进行姿态控制的模式,以避免姿态控制喷气对轨道的影响.
静止轨道卫星使用双组元推力器进行东西位置保持.轨道控制前根据轨控综合效率和轨控目标计算位保参数,制定位置保持策略.通过选取合适的轨控综合效率,根据式(1)和(2),计算出轨控点火时间长度和推进剂消耗量[2-4].


式中,Ke为轨控推力器控制效率,Kc为轨控综合效率,ΔM为推进剂消耗量,Δtc为轨控点火时间长度,Ms为卫星轨道机动前质量,ΔV为控制速度增量,Isp为推力器比冲,Wo和Wf为氧化剂和燃烧剂流率.
目前确定中高轨道卫星轨控效率的方法是轨道参数法,即利用控前控后精密轨道对控制效果进行评估,对Kc×Ke进行标定,下次轨控时使用上次轨控的标定结果.
轨道机动期间,轨控推力器在产生轨控推力的同时也会产生对卫星的扰动力矩.为实现力矩平衡,需要进行姿态控制.这些姿控喷气会对轨道控制效果产生影响并消耗推进剂.每次轨控策略的差异,姿控喷气对轨控效果的影响不同.直接采用上次标定的结果会影响本次轨控参数的计算精度和轨控效果.
本文根据在轨标定出的轨控推力器工作期间对卫星的扰动力矩,计算姿控喷气对扰动力矩进行补偿控制时对轨道位置产生的不期望影响,进而优化轨控综合效率和推进剂消耗量,得到更加准确的轨控点火时间,从而有效地提高卫星东西位置保持精度.
1 问题描述
根据式(1)和(2),Ke体现的是轨控推力器本身的控制效率,在温度、贮箱压力等遥测参数不变的前提下,本文认为推力器的性能不变;Kc由每次变轨姿控喷气影响,则两次使用同样轨控推力器的同方向轨控中:
1)Ke不变;
2)各轴干扰力矩不变;
3)Kc随每次轨道机动点火时间变化.
本文研究通过确定Ke来预估Kc的方法.下面以某静止轨道卫星为例进行说明.
某GEO卫星共安装12个10N双组元推力器,分成A、B两个分支,安装布局如图1所示,图中O-XbYbZb为卫星本体坐标系.
每个分支中推力器2和3是一对,分别产生-Z和+Z方向控制力矩,两者成对同时工作可产生+X的轨控推力;推力器4和5分别产生+Y和-Y力矩,成对工作可产生-X推力;推力器6和7分别产生+X和-X力矩,成对工作可产生+Y推力.在进行轨道机动的过程中,使用一个分支某2个推力器进行轨道控制.在实施轨道机动之前,需根据轨道机动目标预估轨控效率、推进剂消耗量,制定轨道机动控制参数,其中包括确定使用哪2个10N推力器作为轨控推力器及轨控推力器点火时间长度.
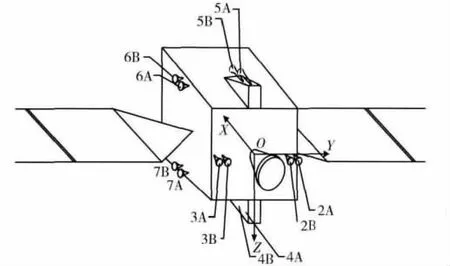
图1 10N推力器布局图Fig.1 Positions of 10N thrusters
2 解决方案
以此GEO卫星的一次东西位置保持为研究对象,不进行飞轮卸载,使用A分支为例优化轨控综合效率.
此次轨控点火长度Δtc、轨控推力器工作时对卫星三轴的干扰力矩Txi、Tyi、Tzi和各推力器产生的力矩Mij,其中i为推力器编号,表示23A、45A、67A、23B、45B、67B,j表示X、Y或Z轴.
2.1 根据速度增量计算有效轨控时间
Ke的初值取工程参数中给定值.
根据Ke和ΔV,按照式(1)和(2)计算不考虑姿控影响的有效轨控时间Δt*c;
2.2 根据点火时间确定姿控喷气冲量
(1)计算各推力器补偿喷气时间ti
根据变轨计划中位置保持模式持续时间、各轴平时干扰力矩等输入,通过地面动力学仿真得到各姿控发动机的喷气时间ti,并计算总的姿控喷气时间ta.
可根据在轨遥测参数显示的控制时间对三轴干扰力矩平均值进行标定.
(2)根据步骤(1)中得到的各推力器用于补偿控制的喷气时间ti计算姿控推力器补偿喷气对轨道产生的冲量Pi
推力器2A、3A在轨道+X方向的冲量为:

推力器4A、5A在轨道+X方向的冲量为:

推力器6A、7A在轨道+X方向的冲量为:

其中,偏航姿态偏置量为ψb,α2/3、α4/5分别为推力器2/3、4/5的推力方向与卫星本体X轴的夹角;β6/7为推力器6/7的推力方向与卫星本体Y轴的夹角.
2.3 根据点火时间确定轨控推力器关调制的时间toff
若轨控发动机为23A,则

若轨控发动机为45A,则

若轨控发动机为67A,则
2.4 计算沿轨控方向的对姿控推力器补偿喷气时间Δtcom
姿控推力器喷气引起的对沿轨道坐标系+X轴切向轨控量的补偿量Δtcom计算公式为:

2.5 预估轨控综合效率Kc
根据式(10)计算所有推力器的总工作时间:

根据式(11)计算考虑了姿控补偿的Δtc,即经过一次优化的点火时间:

依据t总计算推进剂消耗量ΔM*和熄火点的卫星质量

根据 ΔV、Δtc、t总、ΔM*,按照式(14)计算得到一次优化的轨控综合效率Kc

以修正后的Δtc为输入,可进行多次迭代计算,进一步优化Kc,得到更加准确的轨控点火时间和推进剂消耗量.
2.6 根据控后轨道标定Kc×Ke,修正Ke
通过轨道参数法,根据测精轨结果,对轨控效果进行评估,得到此次轨控的实际效率Kc0×Ke0,以及本次轨控推力器的实际连续工作时间Δtc0,可认为Kc0与Δtc0准确对应.本次轨控的其他参数还有ΔV0和Ms0.
按照2.1节~2.4节步骤计算得到姿控各推力器的喷气时间和轨控推力器的关调制时间toff0,姿控喷气对轨道产生的冲量Pi0,沿轨控方向的姿控推力器补偿喷气时间Δtcom0;
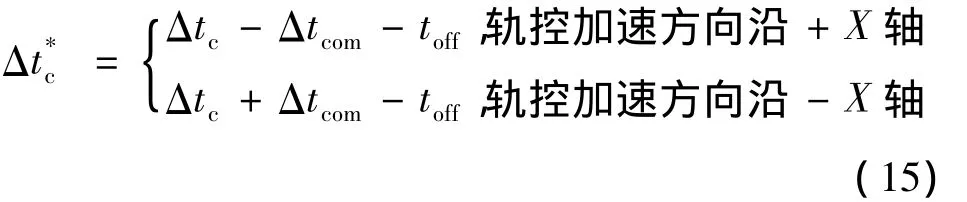
根据式(15)计算推力器本身控制效率Ke,可根据计算出的结果修正下次轨控Ke

3 仿真及在轨实施情况
以GEO卫星定点捕获期间时制定其东西位置保持控制参数为例,说明采用本方法对控制效果的影响.
GEO卫星减速控制选用4A、5A推力器,推力方向为 -X.根据卫星工程参数,Ke=0.766,Isp=2 696 N·s/kg,Wo=2.29 × 10-3kg/s,Wf=1.41 × 10-3kg/s,M6Ax=6.003 59 N·m,M5Ay=-14.563 11 N·m,M3Az=-11.806 33 N·m.
根据卫星在轨工作情况,取4A、5A推力器工作时对卫星三轴的干扰力矩Tx45A=-0.09 N·m,Ty45A=0.14 N·m,Tz45A=-0.072 N·m.
5次东西位置保持操作的在轨实施结果和采用本方法的仿真结果如表1所示.
在当前实际操作中,东西位置保持参数中轨控效率Kc采用上次轨控标定结果或经验值,经过测精轨的轨道控制效果体现的是未经过本方法优化过的结果.表中K'c是经过按照本方法优化后的效率,并给出了若采用K'c可能达到的轨控效果.
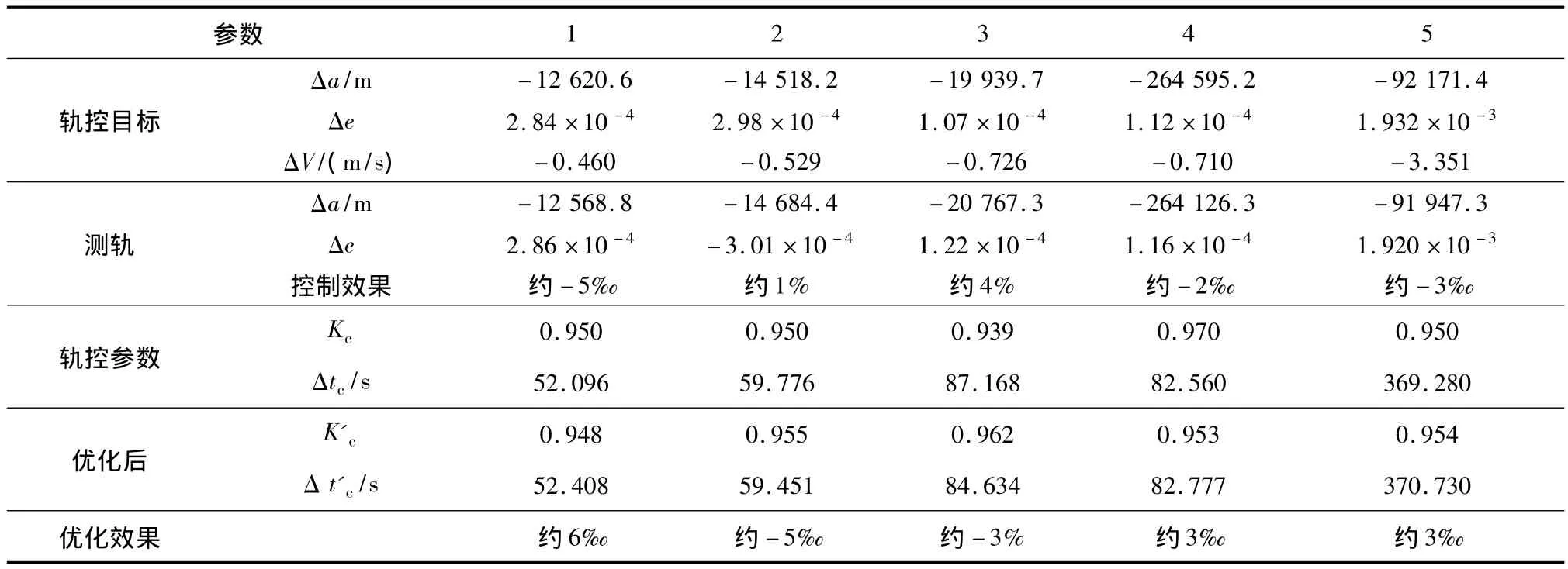
表1 在轨实施情况和仿真结果Tab.1 The results of simulation and on-orbit execution
如表1所示,通过对轨控综合效率的优化可使轨控参数中的连续点火时间更加准确,可使轨道控制误差优于5‰.
4 结论
采用本方法对多颗卫星在轨东西位置保持的控制参数进行了优化,可有效地提高轨道控制精度.
本方法预估姿态控制喷气对轨道的影响的精确程度,取决于三轴干扰力矩平均值的在轨标定的准确度和推力器本身工作性能的稳定.通过遥测下传伪速率调制器的输出,目前具备准确标定干扰力矩的能力.
目前静止轨道卫星轨控参数制定时,考虑了飞轮卸载的影响,而未考虑姿控喷气影响.后续在轨卫星数量的增加、共位任务等因素均对静止轨道卫星的东西位置保持精度提出了更高的要求.可通过采用本方法通过卫星模拟器地面仿真迭代的方式,应用于轨控参数设计的工程实践中.
[1]陈莉丹,唐歌实,刘勇.CE-1卫星轨控标定方法研究与实现[C]//全国第十三届空间及运动体控制技术学术会议论文集.北京:中国自动化学会,2008:288-293.CHEN L D,TANG G S,LIU Y.Orbit control calibration method for Satellite CE-1[C].The 13thChina Space and Motion Control Technology Conference.Beijing:Chinese Association of Automation,2008:288-293.
[2]章仁为.卫星轨道姿态动力学与控制[M].北京:北京航空航天大学出版社,2005:110-118.
[3]杨家墀.航天器轨道动力学控制[M].北京:中国宇航出版社,1995:61-69.
[4]Soop E M.地球静止轨道手册[M].王正才(译).北京:国防工业出版社,1999:153-185.
[5]李于衡.地球静止轨道通信卫星位置保持原理及实施策略[J].飞行器测控学报,2003,22(4):53-61.LI Y H.The Principle of Station-keeping and maneuver strategies of geostationary communication satellites[J].Journal of Spacecraft TT&C Technology,2003,22(4):53-61.