航天器空间自主交会故障诊断*
2014-05-06刘伟杰
刘伟杰,谌 颖
(1.北京控制工程研究所,北京100190;2.空间智能控制技术重点实验室,北京100190)
0 引言
随着航天器交会对接任务的日益增多,尤其是空间自主交会技术的飞速发展,空间交会的安全性也成为一个普遍关注的问题[1-2].在空间交会的最终逼近段,外部存在重力梯度等环境扰动,追踪航天器内部存在太阳能帆板的挠性运动等干扰,以及高精度的控制要求,使得这一阶段的交会操作得到了广泛的关注[3].日本宇宙航空研究开发机构(JAXA)认为在国际空间站邻近空间的接近轨迹设计及其相对应的故障诊断、隔离与恢复(FDIR),最终逼近段的闭环轨迹控制以及 H-转移飞行器(HTV)被国际空间站(ISS)的机械臂安全捕获是交会对接中的三大难点[4].欧洲的自动转移飞行器(ATV)除了在最终逼近段应用导航敏感器监测追踪航天器的状态外,还监测加速度计的测量信息以及与“ISS俄罗斯对接港(DUP)”的相对状态矢量,从而达到 FDIR目的[3,5-6].日本的 HTV 通过设计安全网(safety net)软件监测追踪航天器的姿态、加速度及轨迹等状态量[4,7].美国的“天鹅座”在最终逼近段,除了有冗余导航敏感器进行追踪航天器的故障诊断与隔离(FDI),还通过安全通道监视位置、速度以及计算长半轴导数等3个数据来保证追踪航天器轨迹的安全性[8].工程上这种方法虽然简单实用,但由于航天器的推力发动机输出值可能会存在偏差,以及在外部干扰等作用下容易发生误报警,从而降低这种诊断方法的准确性.另外这种检测方法很难隔离故障,发生故障后最常见的对策就是关机进入安全轨迹或者进行避撞机动,这大幅增加了空间交会的成本.近年来故障诊断与容错技术的发展,在航空航天领域的应用越来越多[9-10].但采用故障诊断的思路解决最终逼近段的广义FDIR问题,目前研究的较为少见.吴宏鑫等[2]采用基于系统输入输出信号处理的方法,结合Hill方程的理论解进行发动机的故障诊断研究.
基于解析模型的故障诊断方法是目前最常用的故障诊断方法之一,其理论得到了迅猛发展.Beard[11]最早提出了用解析冗余代替硬件冗余的思想,并研究了用故障检测滤波器生成FDI所需的方向性残差的方法.在空间交会过程中,考虑到故障误报及漏报的可能性,需要控制器具有一定的鲁棒性,再考虑到追踪航天器本身配置了很多的执行机构冗余和敏感器冗余,还希望控制器具有一定的容错性,至少故障发生后短时间内不会发生碰撞或者触发门限阈值.
本文设计了基于模型的未知输入鲁棒观测器以及H∞鲁棒控制器,探讨空间交会中控制器容错性的重要性,以及分析不同控制器作用下故障检测器的诊断效果,从而总结出最终逼近段故障诊断与控制器设计的研究方向.
1 未知输入观测器
假设目标飞行器在圆轨道上运动,定义目标轨道坐标系OXYZ为:O为目标飞行器质心,OZ指向地心,OX在目标飞行器轨道平面内与OZ垂直且指向前进方向,OY按右手法则确定在目标飞行器的轨道坐标系内,追踪飞行器的位置和速度分别表示为.在最终逼近段,空间交会操作往往限制于轨道平面内,追踪飞行器的运动方程由C-W方程[12]描述为


式中,ω0为目标飞行器的轨道角速度,ax'、az'为外部输入加速度.取令

此处系统只考虑执行机构故障,假定系统受加性未知输入干扰,则系统可以描述为

式中,f(t)∈Rh表示故障矢量,d(t)∈Rq表示系统的扰动矢量,y(t)∈Rm是输出矢量,R为故障分布矩阵,E表示扰动的输入系统矩阵,C表示系统的输出系数矩阵.设计基于全阶观测器的残差生成器

式中,r∈Rp是残差矢量和是状态与输出估计,K为需要设计的观测器参数,Q是残差加权因子.

式中H=QC.对故障和干扰响应的残差进行拉普拉斯变换后得到:

为了使残差r1(t)与干扰无关,必须使传递函数中所有残差与干扰有关的项设置为0[13],即

而获得干扰解耦设计的必要条件为:QCE=HE=0.其通解为

式中,Q1∈Rp×m是任意设计的矩阵,(CE)+是矩阵CE的伪逆.如果rank(CE)=q,则有(CE)+=[(CE)T(CE])-1(CE)T.残差加权矩阵Q的行数为

引理1[13].如果 {C,A}能观,对于任何一组自共轭复数 λi(i=1,2,3,…,n),总存在矩阵 K ∈ Rn×m,及非奇异矩阵L∈Cn×n,使得

式中,li=N(λi)gi,wi=M(λi)gi(i=1,2,…,n).M(s)与N(s)满足如下右互质因式分解:

而gi是一组满足如下两个条件的参数矢量:

2)gi=gj当且仅当 λi=λj.
引理 2[14].假定 E是列满秩的,C是行满秩的,{ C,A}能观,μ 是空间LKer(CE)的大小,且 ξi(i=1,2,…,μ )是 LKer(CE)的一组基.如果存在:①一组特征值 λi(i=1,2,…,n);②一组实数 αij,(i=1,…,p;j=1,…,μ );③一组矢量 gi∈ Cm(i=1,2,…,n).满足下列条件,那么鲁棒故障检测问题有解,并且故障观测器的加权矩阵 Q=[q1,…,qp]T(qi=αi1ξ1+αi2ξ2+αi3ξ3).
1)Re(λi)<0,并且λi是互不相同的复数,并且两组 λi,i=1,2,…,p以及 λj(j=p+1,…,n)是自共轭复数.
4)由式(10)所给定的矩阵L非奇异.
鲁棒故障观测器的参数计算遵循以下步骤.步骤1.求解满足式(11)右互质因数分解的一对右互质多项式矩阵N(s)、M(s).
步骤2.确定LKer(CE)的大小μ.如果μ≠0,算出LKer(CE)的基 ξi(i=1,2,…,μ ),否则中止求解.
步骤 3.求解参数矢量 gi(i=1,2,…,p).gi的表达式
步骤4.本文中A∈R4×4,按照式(10)构成左特征矢量的一般形式.
步骤5.选择一组参数 λi,αij和gi(i∈p+1,…,n),使其满足引理2的4个条件.
步骤6.将得到的λi,αij代入到步骤3中,得到gi的具体形式.
步骤7.基于前面设计的参数以及得到的gi,计算矩阵L和W,以及观测器增益矩阵K以及加权矩阵Q.
其中 N(s)、M(s)的求解采用 Duan[15]给出的方法,对于可观测矩阵对 {C,A},取其增广矩阵,Tn通过将1的前 行进行一系列的行变换和后n+r列进行一系列的列变换,最终转换成的形式,则N(s)、M(s)的一般广义形式为

假设系统全状态可测,所以C=I.干扰只考虑地球摄动等外部干扰,取E=[0 1 0 1]T,可得p=3 .对于LKer(CE)的基可取为ξ1=[1 0 0 0]T,ξ2=[0 0 1 0]T,ξ3=[0 1 0-1]T.
对于观测器系统设计自共轭复数 λi={-1,-2,-3,-4 },代入式(10)即可求得观测器增益
2 闭环控制器
考虑到交会过程中存在大量干扰,本文设计H∞控制器进行仿真研究,首先将系统(2)转换为广义系统的形式.

式中,z∈Rq表示系统可控输出,C1、D12表示状态和控制输入到可控输出的状态矩阵.设计状态反馈控制器

使得无故障时的闭环系统为

根据鲁棒控制理论[16],对于系统(13),存在状态反馈H∞控制器(14),当且仅当存在正定矩阵X和矩阵W,使得以下不等式成立.

如果矩阵不等式(15)存在一个可行解X*、W*,则控制律为K1=W*(X*)-1.
3 仿真分析
仿真中目标航天器轨道高度400 km,初始时相对运动状态(相对位置单位m,速度单位m/s)为x0=[-50,0,0.45,0].故障模型参数采用 ATV 推力发动机的工作参数.根据前一节中的方法,求得H∞控制律下闭环特征值为 λcl=为方便比较,引用PD控制律,控制参数为x'轴向上KPx=0.001 2,KDx=0.07,z'轴向上KPz=0.002,KDz=0.09 .
首先在没有故障发生时进行仿真,在两个轴上各用一个最大值为10-4m/s2的零均值白噪声表示外部干扰.从图1~2中可以看出,两种控制器下系统的响应曲线均十分理想,故障诊断器在两种控制器下都显示没有故障发生.
当系统发生加性故障,在z轴上170~200 s之间发动机的故障可表示为fz(t)=-0.01sin(0.2πt)m/s2,系统的仿真图如图3~4所示.
从仿真中可以看出,当故障发生后,PD控制器达不到控制的目标,追踪航天器有与目标航天器碰撞的可能,这种情况下故障诊断器的诊断效果十分理想.使用鲁棒控制器时,系统的运行轨迹没有显著变化,但故障诊断器产生的残差被大大削弱,有可能导致故障漏报,因此故障诊断器的设计与控制器的设计需要统一考虑.

图1 无故障情况下的相对位置Fig.1 Relative positions without fault

图2 无故障情况下诊断结果Fig.2 Detection results without fault

图3 故障情况下的相对位置Fig.3 Relative positions with fault
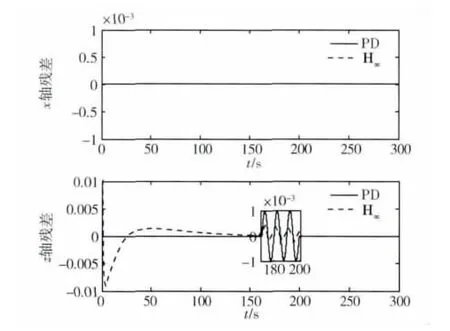
图4 故障情况下的诊断结果Fig.4 Detection results with fault
4 结论
本文针对空间交会最终逼近段的开环C-W方程,设计了基于开环模型的未知输入鲁棒故障观测器和鲁棒H∞控制器.通过对比仿真发现,系统的控制器和故障诊断器之间存在相互影响.因此,针对空间交会的最终逼近段,设计合理的控制器与故障观测器具有光明的工程前景.
[1]林来兴.四十年空间交会对接技术的发展[J].航天器工程,2007,16(4):70-77.LIN L X.Development of space rendezvous and docking technology in past 40 years[J].Spacecraft Engineering,2007,16(4):70-77.
[2]吴宏鑫,胡海霞,解永春,等.自主交会对接若干问题[J].宇航学报,2003,24(2):132-143.WU H X,HU H X,XIE Y C,et al.Several questions on autonomous rendezvous docking[J].Journal of Astronautics,2003,24(2):132-143.
[3]BOURDON J,DELPYP,GANETM,et al.Application of H∞design on ATV control loop during the rendezvous phase[C]//Proceedings of the 5thInternational ESA Conference on Spacecraft Guidance,Navigation and Control Systems.Nice,France:ESA,2002:289-296.
[4]UEDA S,KASAI T,UEMSTSU H.HTV rendezvous technique and GN&C design evaluation based on 1st flight on-orbit operation result[R].Washington D.C.:AIAA,2010.
[5]CAVROIS B,REYNSUD S,PERSONNE G,et al.ATV GNC and safety functions synthesis:overall design,main performances and options[R].Washington D.C.:AIAA,2008.
[6]CAVROIS B,CHAVY S,DELPY P,et al.ATV control monitoring:adedicated ATV function to ensure the safety of the ISS during rendezvous[C]//Proceedings of the 1stIAASS Conference“Space Safety,A New Beginning”.Nice,France:ESA,2005:97-102.
[7]UEDA S,KASAI T,UEMATSU H.HTV guidance,navigation and control system design for safe robotics capture[R].Washington D.C.:AIAA,2008.
[8]SARGENT R,MITCHELL I,BREGER L,et al.A fault management strategy for autonomous rendezvous and capture with the ISS[R].Washington D.C.:AIAA,2011.
[9]邢琰,吴宏鑫,王晓磊,等.航天器故障诊断与容错控制技术综述[J].宇航学报,2003,24(3):221-226.XING Y,WU H X,WANG X L,et al.Survey of fault diagnosisand fault-tolerance controltechnology for spacecraft[J].Journal of Astronautics,2003,24(3):221-226.
[10]张森,于登云,王九龙.国外航天器故障诊断研究进展[C]//第二十届全国测试与故障诊断技术研讨会论文集.贵阳:中国计算机自动测量与控制协会,2011:1-7.
[11]BEARD R V.Failure accommodation in linear system through self reorganization[D].San Francisco:Masschusetts Institute for Jet Engines,1975.
[12]林来兴.空间交会对接技术[M].北京:国防工业出版社,1995:14-15.
[13]KARCANIAS N,KOUVARITAKIS B.The output zeroing problem and its relationship to the invariant zero structure[J].International of Journal of Control,1979,30(1):395-415.
[14]CHEN J,RON J,PATTONR J.Robust model-based fault diagnosis dynamic systems[M].Boston:Kluwer Academic Publishers,1999:94-96.
[15]DUAN G R.Solution to matrix equation AV+BW=VF and their application to eigen-structure assignment in linear systems[J].IEEE Trans.Automat.Contr.,1993,38(2):276-280.
[16]俞立.鲁棒控制-线性矩阵不等式处理方法[M].北京:清华大学出版社,2002:41-52.