空间机器人遥操作关键技术综述与展望*
2014-05-06王学谦
张 涛,陈 章,王学谦,梁 斌
(1.清华大学自动化系,北京100084;2.清华大学深圳研究生院,深圳518055)
0 引言
随着人类空间活动的不断发展,空间机器人的应用越来越受到各国的重视.未来空间活动中,将会进行大量的空间生产、空间加工、空间装配、空间维护和修理等在轨服务工作.早期的在轨服务主要是航天员利用航天飞机进行操作.虽然取得了巨大成功,但舱外活动给航天员的生命带来了风险.空间机器人的出现将航天员从危险的太空环境中解放出来.然而,由于受到机器人机构、智能水平的限制,目前,空间机器人任务主要通过遥操作方式来完成.
空间机器人的控制手段可分为自主控制和遥操作.自主控制的机器人能独立地对外界环境进行感知、判断,并结合自身的任务进行决策、规划和控制.自主控制是将来空间机器人控制一个趋势.然而,受限于当前星上计算机水平及人工智能技术的发展,这种完全自主的空间机器人在很长一段时间内难以实现.另外,空间机器人所面对的复杂的太空环境往往是部分已知甚至是完全未知的,这种情况下无法对环境进行预先建模,在控制时必须依靠人的参与来进行判断.尤其在一些精细作业中(如插拔螺栓等),必须通过一些临场感手段(视觉、力觉和触觉等)将人纳入控制回路才能保证任务的顺利完成.
遥操作(teleoperation)从字面上可以理解为远距离操作.这一概念最早出现于1967年Johnson和Corles为NASA提供的技术报告“Teleoperator and Human Augmentation”.目前,对这一概念有多种不同的定义.Sheridan[1]将遥操作和遥操作机器人(telerobotics)分别定义为“遥操作是人的感知及操作能力在遥点的扩展”和“遥操作机器人是遥操作的一种形式,操作员作为监控者,间歇地与计算机通信,下发关于任务目标、限制、计划、意外情况、假设、建议等信息,获得关于任务完成情况、困难、关系的信息和需要的传感器原始数据,同时,遥操作机器人根据收到的指令,加上自己的人工感知和人工智能执行任务”.Bejczy[2]对遥操作的定义是“由操作者远程控制,具备感知能力的机械臂或运动设备的运动”.冯健翔等[3]对遥操作的定义是“遥操作是远距离操作,是在远方的人的行为动作远距离作用下,使事物产生运动变化”.
尽管各种定义字面存在差异,但其中本质基本相同.可以认为,遥操作的概念至少包括两方面内容:
1)操作者和被控对象之间存在距离限制和信息交互;
2)被控对象可以按操作者的意图进行运动.
目前中国正在大力发展航天技术,大量卫星的维护和未来空间站的建立日益要求加快发展空间在轨服务技术.由于空间自主的水平较低,遥操作在轨服务(tele-operational on-orbit servicing)是现阶段的主流方式,有着巨大的研究意义和现实应用价值.本文对空间遥操作现状进行了介绍,并对遥操作关键技术进行了分析和研究,最后进行了展望.
1 空间遥操作技术现状
1.1 典型的空间机器人遥操作在轨实验
到目前为止,已经进行了多个典型的在轨服务实验,其中有5个具有里程碑意义.第一个是航天飞机遥机械臂系统(SRMS,space shuttle remote manipulator system)[4],它是第一个可操作的空间机器人系统,基于SRMS,加拿大又为国际空间站设计了空间站遥机械臂系统(SSRMS,space station remote manipulator system)[5],相比 SRMS,SSRMS 拥有更高的定位精度,并具有冗余自由度,能进行更为灵活的操作;第二个是德国的ROTEX[6-7],它是第一个可从地面进行遥操作的空间机器人,但它属于舱内机器人(IVR,inner vehicular robot);第三个是日本的ETSVII[8],它是第一个舱外自由飞行空间机器人,具有地面遥操作和在轨自主控制的能力,完成了漂浮物体抓取、在轨可更换单元(ORU,orbital replacement unit)的更换和燃料补给、视觉监测、目标星操作与捕获等实验,为空间服务积累了宝贵的经验;第四个里程碑是德国的ROKVISS[9],它是第一个高逼真遥现方式控制的高性能轻型机器人;第五个里程碑是美国的 Orbital Express[10],进行了完全自主的在轨服务.同时还有针对哈勃望远镜进行的机器人在轨服务研究,以及欧洲开展的在轨服务的商业应用.它们都是在轨服务的典型代表.最近NASA提出了在轨机器人进行燃料重复加注试验验证任务(RRM,robotic refueling mission).针对没有采用可服务性设计的卫星,通过地面或在轨人员遥操作,控制空间机器人进行绝热层切割、保护盖的拆除、阀门的拧开、喷嘴的对接、燃料的泵注、保护盖的重装等一系列操作,实现对卫星燃料加注整个过程的模拟.整个过程运用了4种不同的末端工具,而且体现了精细遥操作的思想.美国DARPA的凤凰计划则是目前正在进行中的研究项目,首次提出了对功能失效卫星的零部件进行循环利用,利用空间机器人在轨集成新航天器的新思路.此外,一些星际探测活动中,例如勇气号、机遇号、好奇号等火星探测器,也通过遥操作的方式获取了大量的火星表面数据信息[11].中国的月球探测器“玉兔号”[11]中,遥操作也发挥了重要作用,为导航定位、月面地形重构、路径规划和机械臂探测等活动提供了技术支撑.表1给出了遥操作在典型在轨服务中的应用.
1.2 研究技术现状
在地球轨道或者深空中的连续遥操作受限于通信中的时间延迟(简称时延).时延的主要来源是信号传输时延、接收站或者中继卫星的处理时延等.低轨遥操作中的回路时延(从发出离散信号到接收到相应的反馈信息所需要的时间)至少为0.4 s,月球遥操作中的回路时延一般为3 s,而火星探测器的回路时延大约为20 min.值得注意的是,空间遥操作的大时延并不是来自无线信号传输(火星探测器除外),而是主要来自设备间通信链路的时延、数据处理时延以及计算时延.地球轨道中遥操作的回路时延大约为3~10 s[12-13].在特殊情况下也可将回路时延控制在 0.5 s内[14].1962 年,Ferrel在视觉反馈存在时延的情况下,利用单边系统进行了第一个实验.采用“移动—等待”策略克服系统的不稳定性.但是,这种方式是以降低系统的工作效率为代价,大部分时间花在等待上,而不是工作上.目前,主要有3种控制策略来解决系统不稳定的问题:双边控制策略[15-16]、图形预测策略、监督控制策略(如图1所示).双边控制策略是利用控制算法消除时延的影响.图形预测策略和监督控制策略将时延排除在控制回路之外,也就不存在稳定性的问题.其中,图形预测策略将控制回路在主端进行闭环,而监督控制策略将控制回路在从端进行闭环.根据双边控制策略、图形预测策略及监督控制等自身的特点,他们分别被应用在不同的遥操作任务中(如图2所示).

表1 典型的在轨服务任务Tab.1 Typical on-orbit service missions

图1 遥操作控制策略Fig.1 Strategy of teleoperation
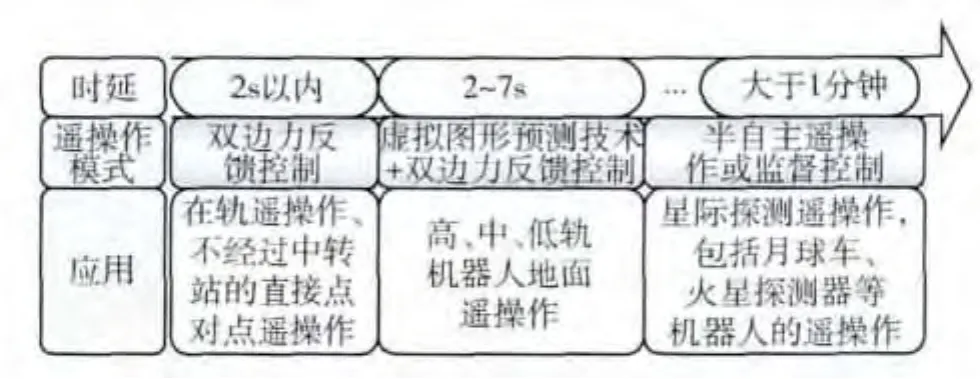
图2 遥操作模式及其应用Fig.2 Application of different teleoperation mode
空间机器人遥操作中的时延问题非常具有挑战性,并且是一个研究的热点方向.目前存在很多解决空间时延的方法,并成功地应用于空间机器人的遥操作中,尽管有一些是实验室条件下的测试.但是,单独的方法往往是不够的,应该包含并结合其中最好的技术[17].
2 遥操作在轨服务关键技术
2.1 图形预测仿真技术
三维图形预测仿真即预测显示(predictive display)是大时延遥操作中的一项关键技术.预测显示被认为是能够补偿大时延影响的唯一手段.预测显示的基本思想是基于系统模型,根据当前状态和控制输入,对系统状态进行预测,并以图形的方式显示给操作员.预测显示分为两种类型:一种是根据系统当前状态和时间导数,利用控制输入通过泰勒级数进行外推;另一种是建立系统运行的仿真模型,在模型中融合系统的当前状态、导数以及控制输入,然后让仿真系统以比实际过程快得多的速度运行[18].该技术的主要应用如下.
(1)实现临场感交互界面
该技术可以通过实现自然的操作方式和提供环境状态的临场感显示实现遥现目标.另外,通过合成手段复现操作手状态,可以减少对传输带宽的要求和克服实际观察手段的限制.
(2)作为先进的仿真工具
将虚拟环境同预测技术相结合,可以进行预测显示.一方面,根据遥操作指令和操作器的模型,预测显示遥控指令的结果.另一方面,根据接收到的遥测信号和控制指令流,在预定周期内进行预测外推.预测外推的结果最终在虚拟环境中显示给操作员,从而使操作员获得操作器和操作环境的直观信息.进而可以进行连续的规划,增强对当前操作状态和决策规划结果的判断能力,以增强遥操作的平稳性和连续性.预测外推是用操作器的运动学和动力学模型进行仿真得到的.
(3)利用合成技术进行增强现实显示
在实际操作环境下,利用传感器获得操作环境的状态信息是有限的.利用虚拟现实技术,通过虚拟环境进行增强现实显示,可以提高观察的灵活性和观察能力.例如,在插孔实验中,为了通过位置控制完成精细的插孔操作,必须使操作员在插孔过程中对机械手末端状态有准确地判断.但是限于实际的摄像观察手段,很难满足要求.通过增强现实显示,可以将观察点置于插孔中,对孔内环境进行放大显示,从而有助于操作员进行精细操作.
图形仿真应用于空间机器人遥操作包括3个阶段:离线的任务分析和规划(off-line task analysis and planning),操作员培训(operator training)和在线执行任务(on-line task execution).为了保证远端真实任务环境和虚拟环境的一致性,采用了可靠的相机标定和对象定位算法.另外,保证高仿真度一般可以采用以下方法:1)精确的三维模型;2)精确的运动学、动力学模型;3)可靠的相机校正和对象定位;4)使用相同的控制软件驱动本地仿真机器人和远端真实机器人.
2.2 双边力反馈控制技术
双边力反馈技术是解决空间遥操作大时延问题的另一个重要方法,与图形预测仿真相比有以下优点:1)不要求远端操作环境为结构化和已知的环境,从而扩大了力反馈双边控制遥操作的适应性;2)力反馈双边控制在通信线路中传送数据,从而降低了对通信带宽的要求;3)力反馈双边控制具有较高的可靠性和安全性,把从手与环境的作用力直接反作用于操作者,让操作者对从手的受力情况有一个直接的了解,然后再决定下一步的动作.它相当于把人的智能直接加入控制回路,从而保证其可靠性和安全性.但是,力反馈方法面临的主要问题是由通信时延引起的稳定性和透明性问题[19].
为了解决时延带来的稳定性问题,很多学者进行了卓有成效的研究.目前的研究思路主要集中在通过无源性理论、现代控制理论、滑模变结构控制方法、基于事件的方法等几种途径.
基于无源性理论的方法是在电路网络二端口理论基础上发展而来的.通过将遥操作控制系统与二端口电路网络进行类比,可以得出,由于通信环节中存在时延,从而破坏了系统的无源性.为了消除时延给系统无源性带来的影响,Anderson 和 Spong[20]、Niemeyer和Slotine[21-22]等人分别提出了散射变换法和波变量法.散射变换法利用特定的控制律对通信环节的时延进行补偿,补偿后的通信环节与无损的传输线等效,从而保证了其无源性.波变量法则是从另一个角度出发,在主端和从端均引入波变换环节,使得在通信环节传输的信号不是速度/力信号而是波变量信号.并且,从能量输入输出的角度证明,波变量将时延引起的功率以能量的形式存储在系统中,并保证了系统的无源性.基于波变量法的遥操作控制系统如图3所示,其中,m与md为主端速度信息与从端速度指令,fs与fsd为从端力与主端力指令信号,b为波阻,T1、T2为通信时延,um、us、vm与vs为波变量.
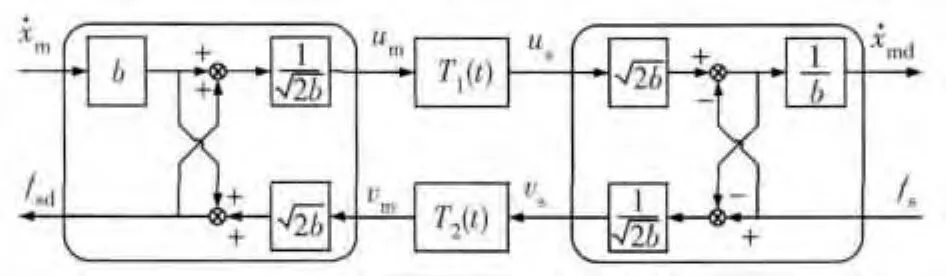
图3 波变量控制系统Fig.3 Wave variable bilateral control
其波变换方程为:

虽然形式不一样,但散射变换法与波变量法被证明在本质上是相同的.由于波变量法对任意时延都具有稳定性,因此,基于散射变换和波变量法的遥操作技术得到了深入地研究.Niemeyer对图3所示的波变量遥操作控制系统进行了分析.认为该控制回路中存在3个通道:主端阻尼通道、波反射通道和从端反馈信号通道.波反射通道中的信号会对控制产生不良影响,需要消除.Niemeyer在主从双端各增加比例环节进行阻抗匹配来消除波反射现象[23].
不论是散射变换方法还是波变量方法,在通信环节中均未进行位置信号的传输.由于没有精确的位置信号来进行控制以及瞬态响应、数值舍入误差等因素的存在,可能导致发生主端与从端位置不一致的现象,这种现象被称为位置漂移.为了消除位置漂移,需要将位置信息在主从双端进行传输.Niemeyer[23]提出了一种波积分的思想,在发送端将波变量与波积分联合,在接收端对混合信号进行分离.由于波积分包含了位置信息,因此利用该信息可消除主从端位置上的偏差.波积分的传输过程如图4所示,其中与即为波积分.Chopra 等[24]也提出了另一种思路来消除位置漂移.一方面对速度信号进行散射变换;另一方面,主从双端均将精确的位置信号发送至对方以进行比例控制.
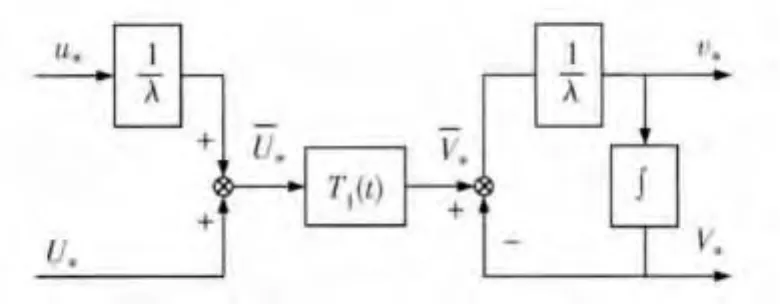
图4 波积分Fig.4 Wave integrals
以上都是针对的固定时延情况.与固定时延不同的是,当通信环节为变时延时,传输的信号会产生失真的现象(拉伸或压缩).散射变量或波变量的失真可能引入额外的能量,从而导致系统的无源性遭到破坏[25].Lozano 等[26]提出了一种方法对过剩的能量进行耗散,最终保证系统的无源性,其结构如图5所示,其中,g1、g2为耗散环节,T1、T2为时延.能够证明,当耗散环节满足一定条件时,信号通道是无源的.值得注意的是,这种方法需要已知时延变化率的上界.
Ryu等[27-29]认为,传统的基于无源性理论的遥操作由于是在频域上进行的分析,必须采用固定阻尼设计以确保系统在任意操作下的无源性,这样将使系统变得过于保守,从而牺牲了系统的操纵性.为解决此问题,Ryu提出了时域无源性控制器的概念.时域无源控制器是一种基于实时监测的自适应方法,由无源观测器和无源控制器组成.无源观测器监测端口输入输出能量的动态变化,当检测到系统的无源性遭到破坏时,无源控制器进行阻抗的调整以对多余的能量进行耗散.这种方法只有在需要的时候才进行无源性控制,因此保守性较低;它的另一个优点是不依赖于模型,适用性较强.

图5 变时延遥操作Fig.5 Time-varying delay teleoperation
考虑到人的感知与操纵特性,Tanner等[30-33]将遥操作系统与环境的交互划分为操作带和感知带.操作带是双向的,包含低频的运动和力信号;感知带是单向的,向操作者反映人类易于感知的高频信号.通过这种方式,系统的操作性能得到了提高.
为了利用一个主端手控器对协作抓取的多个从端机器人进行遥操作控制,Lee和Li等[34-35]提出了无源性分解的概念,将从端的机器人在关节速度空间进行分解,分解后的两个子系统分别为轮廓系统(shape system)和封闭系统(locked system).在两个系统分别进行遥操作控制器的设计.Lee证明了当这两个子系统的控制律满足一定的条件时,整个系统是无源的.
为了获得更好的临场感,Lawrence[36]提出了四通道控制方法.四通道结构在主端和从端均进行力和位置信号的传输,在没有时延的情况下能达到理想的透明性.如图6所示,其中,Zh、Ze为操作员与环境的阻抗,Zm、Zs为主从阻抗,C1~C6为控制参数,Fh与Fe分别为操作力与环境作用力,Vs为从端速度.
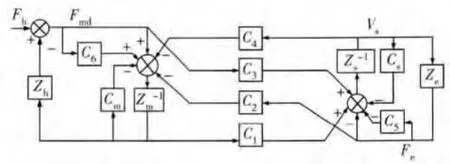
图6 四通道结构Fig.6 Four-channel bilateral control
四通道结构的提出为人们提高遥操作系统的透明性提供了一个重要的指导方向和依据,但它没有考虑真实情况中存在的时延,因此很多人以四通道结构为基础进一步进行了研究.Liu和Tavakoli[37-38]等分别用动态逆控制器和自适应控制器代替图6中的控制器C1、Cm、C4和Cs,以对非线性从端进行控制并对模型的不确定性误差进行补偿.考虑到基于无源理论的波变量等方法对延迟的稳定性,Aziminejad等[39-40]提出了将四通道与波变量控制相结合的方法,系统结构如图7所示,其中各参数的定义与图6相同.

图7 四通道与波变量相结合Fig.7 Combination of four-channel and wave variable
基于现代控制理论的遥操作控制算法大都利用了H∞理论或μ综合方法[41-42],采用这种方法时,将时延看作系统的扰动进行处理.与无源性方法相比,H∞理论所能处理的时延更短,一般是1 s以内,且只能处理有界时延的情况.
Park等[43-45]将滑模控制方法应用到双边遥操作中,在从端采用滑模观测器和控制器对机器人进行控制,在主端依旧采用阻抗控制,利用滑模控制对参数的鲁棒性补偿通信环节时延带来的不利影响.当然,滑模控制自身的高频振荡等特性也会给遥操作带来问题.
中科院的席宁等[46-51]提出了一种全新的解决遥操作时延问题的思路,称为基于事件的方法.在这种控制方法中,引入一个不同于时间的新的物理量代替时间作为运动参变量.该变量根据传感信息和控制过程进行实时更新.由于绕开了时间因素,基于事件的遥操作在时延下总能保持稳定性.但这类方法的难点在于找到一个合适的参变量.参变量不同时,系统的透明性、操纵性等性能都会存在很大的差异.
2.3 地面验证技术
由于航天发射与在轨维修所需费用十分昂贵,必须保证航天器在轨工作的成功.因此,发射前必须进行实际的测试,理想情况下利用真实的硬件和软件来确保航天器的正常运行.遥操作分系统作为空间机器人的操作端,需要和尽量真实的空间机器人进行联合试验,以保证遥操作分系统正常工作.因此,采用硬件在回路中的方式,开发了空间机器人试验台来进行物理验证和星载验证[52-53].
目前,存在几种技术来模拟零重力环境,如气浮、水浮、磁悬浮和自由落体,然而只有气浮方式最有效.水浮被用来进行航天员培训,它不适合试验航天器.自由落体可以完成三维环境下的零重力模拟,但是只能维持几秒的短暂时间.磁浮系统只能提供一个小范围的低力/力矩动力学环境.气浮方式已证明为航天器仿真的有用技术,但是只能进行二维平面的运动.
在对空间机器人遥操作进行地面验证中,关键要实现机械臂动力学的建模与实时仿真、机械臂末端物理运动的验证、空间机械臂星载处理器的验证和遥操作通信链路时延、带宽等特性的模拟.其中,动力学建模的经典方法包括“虚拟机械臂”[54]或“动力学等价机械臂”[55-56]等,仿真时可以采用基于Adams[57]的虚拟样机方案或 Dymola[58]多领域统一模型的仿真.空间机械臂的运动采用运动学等效原理,利用工业机械臂进行物理验证,验证空间机械手的末端运动并获得手眼相机的图像.实验时可与天上下传的手眼相机的图像进行对比.星载验证是设计星载模拟器对载荷计算机的运算能力进行实际验证,保证上传的运动指令在轨能按规划的时序进行运动.星载模拟器的硬件、软件及相关接口与星载处理器完全一致,简单地说是星载处理器的备份件,其电气接口、计算能力与星载处理器的完全一致.通信链路模拟可以完成遥操作闭环通信链路的模拟,包括时延、带宽等通信链路特性.上述方法可实现对遥操作系统充分的验证,保证遥操作任务顺利完成.
3 结论与展望
遥操作扩展了人在遥端操作物体的能力,进一步提高了人与机器人的交互以及机器人与环境的交互能力.前者的意义在于由人去实现机器人在非确定环境中难以做到的规划和决策,后者的意义在于由机器人去完成人所不能达到的恶劣环境下(深海、空间、高温、辐射、毒害和战场等)的作业任务.
传统的手动双边遥操作方式(较小的时延,一般小于1 s)和基于监督控制的方式(时延可到几秒)这两种方式各有优缺点,互为补充.监督方式指操作员在地面或者较舒适的临近空间环境进行工作,监督低智能的遥机器人,并在需要时或者发生危险时进行操作.监督方式的优点是:存在时延的情况下也能快速完成任务;可自主、快速地响应突发事件;在连续的位置和力控制中具有更高的精度;可以连续执行长时间的任务且不需要操作员连续关注.而手动遥操作更为灵活,尤其对于复杂任务或突发、不可预测的机械故障,手动遥操作是必不可少的.
大时延遥操作是一个具有挑战性的问题,尤其在空间机器人的操作中还存在通信带宽窄、控制能力差等特点,使得空间机器人遥操作更加困难.人们针对时延问题提出了很多解决方案,从纯双边控制到遥端具有一定的自主性,然而进行的实际应用很少.由于没有建立统一的命名术语,使得很难进行比较.
哈勃望远镜的成功修复充分验证了在轨服务的重要作用,通过替换故障部件延长了航天器的寿命,并通过安装采用新技术的部件提高了航天器的性能.空间自主在轨服务技术也凭借它成本低、风险小、军事利用价值高等特点,成为了空间技术领域新的研究与发展方向.但目前由于智能水平的限制,从在轨维修方面考虑遥操作技术是比较现实的发展方向.
近20年来的空间遥操作机器人实验表明,自动化和机器人技术已经达到了较高水平,可以用来辅助或者代替航天员进行大量的工作.空间机器人技术已经成为外太空开发以及空间站、卫星、其他平台操作和维护的关键技术,可以缩减开支并将航天员从危险的工作中解放出来.未来的空间活动和在轨服务中,智能机器人技术将用来辅助或执行不同的空间任务.但是我们没有必要等到机器人达到完全的自主和智能才开展空间任务,因为依赖现在的遥操作技术就能将机器人变为“人类手臂在太空中的延伸”.到目前为止的在轨操作都是由航天员直接完成,由于人类在太空中时间和地点的限制,只有在轨服务的主体由人转变为遥操作机器人时,遥操作才能成为普遍应用的技术.由于空间机器人所面对的复杂的太空环境往往是部分已知甚至是完全未知的,这种情况下无法对环境进行预先建模,在控制时必须依靠人的参与来进行判断.尤其是在一些精细作业中(如插拔螺栓等),必须通过一些临场感手段(视觉、力觉和触觉等)将人纳入到控制回路才能保证任务的顺利完成.因此,虽然自主控制一方面取得发展,但人在控制中的作用也是不可代替的,总而言之,空间机器人控制技术的发展趋势如图8所示.

图8 遥操作技术发展趋势Fig.8 Trend of the teleoperation technology
未来航天员在轨服务和机器人在轨服务由于侧重点不同都会得到发展,并在未来的空间活动中发挥更大的作用.对机器人在轨服务来说,常规的在轨服务,如燃料加注、模块单元替换,可以高度自主的执行,但仍然需要操作员进行监督并在异常情况出现时利用遥操作进行恢复.概括起来,未来的空间遥操作将有如下的发展趋势:
1)在遥操作中利用灵巧手或者工具适配器以适应多种任务;
2)利用多通道、高逼真度的临场感技术提高遥操作的效率;
3)结合本地三维重构技术与虚拟现实增强技术实现非结构化空间环境中的遥操作;
4)利用多人操作或多机协同遥操作提高对空间大型航天器的在轨服务能力.
[1]SHERIDAN T B.Teleoperation,telerobotics and telepresence:A progress report[J].Control Engineering Practice,1995,3(2):205-214.
[2]BEJCZY A K.Toward advanced teleportation in space[C]//Progress in Astronautics and Aeronautics.Washington,D.C.:AIAA,1994:161.
[3]冯健翔,卢昱.遥科学初探[J].飞行器测控学报,2000,19(1):5-11.
[4]BELAND S,DUPUIS E,DUNLOP J,等.加拿大的空间机器人——从国际空间站的灵敏作业机器人到行星探测机器人[J].控制工程,2001(2):22-29.
[5]GIBBS G,SACHDEV S.Canada and the international space station program:overview and status[J].Acta Astronautica,2002,51(1):591-600.
[6]BRUNNER B,HIRZINGER G,LANDZETTEL K,et al.Multisensory shared autonomy and tele-sensor-programming-key issues in the space robot technology experiment ROTEX[C]//Proceedings of the 1993 IEEE/RSJ International Conference on Intelligent Robots and Systems.New York:IEEE,1993:2123-2139.
[7]HIRZINGER G,BRUNNER B,DIETRICH J,et al.Sensor-based space robotics-ROTEX and its telerobotic features[J].IEEE Transaction on Robotics and Automation,1993,9(5):649-663.
[8]IMAIDA T,YOKOKOHJI Y,DOI T,et al.Groundspace bilateral teleoperation of ETS-VII robot arm by direct bilateral coupling under 7s time delay condition[J].IEEE Transactions on Robotics and Automation,2004,20(3):499-511.
[9]ALBU-SCHAFFER A,BERTLEFF W,REBELE D,et al.ROKVISS-robotics component verification on ISS current experimental results on parameter identification[C]//2006 IEEE International Conference on Robotics and Automation.New York:IEEE,2006:3879-3885.
[10]刘进军.轨道快车——卫星拯救者[J].卫星电视与宽带多媒体,2007,21:40-42.
[11]吴伟仁,周建亮,王保丰,等.嫦娥三号“玉兔号”巡视器遥操作中的关键技术[J].中国科学:信息科学,2014,44(4):425-440.WU W R,ZHOU J L,WANG B F,et al.Key technologies in the teleoperation of Chang'E-3“Jade Rabbit”rover[J].Scientia Sinica Information,2014,44(4):425-440.
[12]SHERIDAN T B.Space teleoperation through time delay:review and prognosis[J].IEEE Transactions on Robotics and Automation,1993,9(5):592-606.
[13]ODA M.System engineering approach in designing the teleoperation system of the ETS-VII robot experiment satellite[C]//1997 IEEE International Conference on Robotics and Automation.New York:IEEE,1997:3054-3061.
[14]CARSTEN P D.Robotics component verification on ISS ROKVISS-preliminary results for telepresence[C]//Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems.New York:IEEE,2006:4595-4601.
[15]陈俊杰.空间机器人遥操作克服时延影响的研究进展[J].测控技术,2007,26(2):1-5.CHEN J.Research headway of overcoming time-delay infection for teleoperation of space robot[J].Measurement& Control Technology,2007,26(2):1-5.
[16]NIEMEYER G,SLOTINE J E.Telemanipulation with time delays[J].The International Journal of Robotics Research,2004,23(9):873-890.
[17]PREUSCHE C.Telerobotics[M].Springer Berlin Heidelberg:Springer Handbook of Robotics,2008:741-757.
[18]王学谦,梁斌,李成,等.自由飞行空间机器人遥操作三维仿真系统研究[J].宇航学报,2009,30(1):402-408.WANG X,LIANG B,LI C,et al.Study on three dimensional predictive simulation system of teleoperation for free flying space robot[J].Journal of Astronautics,2009,30(1):402-408.
[19]邓启文,韦庆,李泽湘.大时延力反馈双边控制系统[J].机器人,2005,27(5):410-413.DENG Q W,WEI Q,LI Z X.Force-reflection bilateral control system with large time delay[J].Robot,2005,27(5):410-413.
[20]ANDERSON R J,SPONG M W.Bilateral control of teleoperators with time delay[J].IEEE Transactions on Automatic Control,1989,34(5):494-501.
[21]NIEMEYER G,SLOTINE J J E.Stable adaptive teleoperation[J].IEEE Journal of Oceanic Engineering,1991,16(1):152-162.
[22]NIEMEYER G.Using wave variables in time delayed force reflecting teleoperation[D].Cambridge:Massachusetts Institute of Technology,1996.
[23]NIEMEYER G,SLOTINE J J E.Using wave variables for system analysis and robot control[C]//1997 IEEE International Conference on Robotics and Automation.New York:IEEE,1997:1619-1625.
[24]CHOPRA N,SPONG M W,ORTEGA R,et al.On tracking performance in bilateral teleoperation[J].IEEE Transactions on Robotics,2006,22(4):861-866.
[25]HOKAYEM P F,SPONG M W.Bilateral teleoperation:an historical survey[J].Automatica,2006,42(12):2035-2057.
[26]LOZANO R,CHOPRA N,SPONG M.Passivation of force reflecting bilateral teleoperators with time varying delay[C]//Proceedings of the 8 Mechatronics Forum.New York:IEEE,2002:964-962.
[27]RYU J,KWON D,HANNAFORD B.Stable teleoperation with time-domain passivity control[J].IEEE Transactions on Robotics and Automation,2004,20(2):365-373.
[28]RYU J,ARTIGAS J,PREUSCHE C.A passive bilateral control scheme for a teleoperator with time-varying communication delay[J].Mechatronics,2010,20(7):812-823.
[29]JEE-HWAN R,PREUSCHE C.Stable bilateral control of teleoperators under time-varying communication delay:time domain passivity approach[C]//2007 IEEE International Conference on Robotics and Automation.New York:IEEE,2007:3508-3513.
[30]TANNER N A,NIEMEYER G.Online tuning of wave impedance in telerobotics[C]//2004 IEEE Conference on Robotics,Automation and Mechatronics.New York:IEEE,2004:7-12.
[31]TANNER N A,Niemeyer G.Practical limitations of wave variable controllers in teleoperation[C]//2004 IEEE Conference on Robotics,Automation and Mechatronics.New York:IEEE,2004:25-30.
[32]TANNER N A,NIEMEYER G.Improving perception in time delayed teleoperation[C]// 2005 IEEE International Conference on Robotics and Automation.New York:IEEE,2005:354-359.
[33]TANNER N A,NIEMEYER G.Stabilization through gyration:a wave variable approach to high frequency force feedback in telerobotics[C]//The 14thSymposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems.New York:IEEE,2006:153-159.
[34]LEE D,LI P Y.Passive coordination control of nonlinear bilateral teleoperated manipulators[C].IEEE International Conference on Robotics and Automation.New York:IEEE,2002:3278-3283.
[35]LEE D,LI P Y.Passive bilateral feedforward control of linear dynamically similarteleoperated manipulators[J].IEEE Transactions on Robotics and Automation,2003,19(3):443-456.
[36]LAWRENCE D A.Stability and transparency in bilateral teleoperation[J].IEEE Transactions on Robotics and Automation,1993,9(5):624-637.
[37]LIU X,TAVAKOLI M.Adaptive control for linearly and nonlinearly parameterized dynamic uncertainties in bilateral teleoperation systems[C]//2011 IEEE International Conference on Robotics and Automation.New York:IEEE,2011:1329-1334.
[38]LIU X,TAVAKOLI M.Inverse dynamics-based adaptive control of nonlinear bilateral teleoperation systems[C]//2011 IEEE International Conference on Robotics and Automation.New York:IEEE,2011:1323-1328.
[39]AZIMINEJAD A,TAVAKOLI M,PATEL R V,et al.Wave-based time delay compensation in bilateral teleoperation:two-channel versus four-channel architectures[C]//American ControlConference. New York:IEEE,2007:1449-1454.
[40]AZIMINEJAD A,TAVAKOLI M,PATEL R V,et al.Stability and performance in delayed bilateral teleoperation:Theory and experiments[J].Control Engineering Practice,2008,16(11):1329-1343.
[41]STRASSBERG Y,GOLDENBERG A A,MILLS J K.A new control scheme for bilateral teleoperating systems:Lyapunov stability analysis[C]//1992 IEEE International Conference on Robotics and Automation.New York:IEEE,1992:837-842.
[42]LEUNG G M H,FRANCIS B A,APKARIAN J.Bilateral controller for teleoperators with time delay via μsynthesis[J].IEEE Transactions on Robotics and Automation,1995,11(1):105-116.
[43]JONG H P,HYUN C C.Sliding-mode controller for bilateral teleoperation with varying time delay[C]//1999 IEEE/ASME International Conference on Advanced Intelligent Mechatronics.New York:IEEE,1999:311-316.
[44]PARK J H,Cho H C.Sliding mode control of bilateral teleoperation systems with force-reflection on the Internet[C]//2000 IEEE/RSJ International Conference on Intelligent Robots and Systems.New York:IEEE,2000:1187-1192.
[45]HYUN C C,JONG H P,KYUNGHWAN K,et al.Sliding-mode-based impedance controller for bilateral teleoperation under varying time-delay[C]//IEEE International Conference on Robotics and Automation.New York:IEEE,2001:1025-1030.
[46]XI N,TARN T J.Action synchronization and control of Internet based telerobotic systems[C]//IEEE International Conference on Robotics and Automation.New York:IEEE,1999:219-224.
[47]王清阳,席宁,王越超.利用混杂Petri网对基于事件的机器人遥操作系统建模研究[J].机器人,2002,24(5):399-403.WANG Q,XI N,WANG Y.Modeling of robot teleoperation based on event using hybrid petri nets[J].Robot,2002,24(5):399-403.
[48]王清阳,席宁,王越超.基于谓词不变性的状态反馈控制在机器人遥操作中的应用[J].机器人,2003,25(5):428-431.WANG Q,XI N,WANG Y.State feedback of predicate-invariance for robot teleoperation [J]. Robot,2003,25(5):428-431.
[49]王清阳.机器人遥操作预测控制新方法及实现[J].微计算机信息,2008,24(23):260-261.WANG Q.A new measure to handle the problem of time-delay in telerobot system[J].Microcomputer Information,2008,24(23):260-261.
[50]陈丹,席宁,王越超,等.广义预测控制方法在网络遥操作机器人系统中的应用[J].机械工程学报,2009,45(3):191-196.CHEN D,XI N,WANG Y,et al.Generalized predictive control scheme for the internet-based telerobot control system[J].Journal of Mechanical Engineering,2009,45(3):191-196.
[51]陈丹,席宁,王越超,等.网络遥操作系统中基于事件的预测控制策略[J].控制理论与应用,2010,27(5):623-626.CHEN D,XI N,WANG Y,et al.Event-based predictive control strategy for teleoperation via internet[J].Control Theory & Applications,2010,27(5):623-626.
[52]王学谦,梁斌,徐文福,等.空间机器人遥操作地面验证技术研究[J].机器人,2009,31(1):8-14.WANG X,LIANG B,XU W,et al.Ground-based verification technology for teleoperation of space robot[J].Robot,2009,31(1):8-14.
[53]徐文福,梁斌,李成,等.空间机器人微重力模拟时延系统研究综述[J].机器人,2009,31(1):88-96.XU W,LIANG B,LI C,et al.A review on simulated micro-gravity experiment systems of space robot[J].Robot,2009,31(1):88-96.
[54]VAFA Z,DUBOWSKY S.On the dynamics of manipulators in space using the virtual manipulator approach[C]//1987 IEEE International Conference on Robotics and Automation.New York:IEEE,1987:579-585.
[55]LIANG B,XU Y,BERGERMAN M.Dynamically equivalent manipulator for space manipulator system:part 1[C]//Proceedings of the 1997 IEEE International Conference on Robotics and Automation.New York:IEEE,1997:2765-2770.
[56]LIANG B,XU Y,BERGERMAN M,et al.Dynamically equivalent manipulator for space manipulator system:part 2[C]//Proceedings of the 1997 IEEE/RSJ International Conference on Intelligent Robot and Systems.New York:IEEE,1997:1493-1499.
[57]徐文福,强文义,梁斌,等.基于虚拟样机技术的空间机器人系统的建模与仿真[J].机器人,2005,27(3):193-196.XU W,QIANG W,LIANG B,et al.Modeling and simulation of space robot system based on virtual prototyping technology[J].Robot,2005,27(3):193-196.
[58]XU W,LIU Y,LIANG B,et al.Unified multi-domain modelling and simulation of space robot for capturing a moving target[J].Multibody System Dynamics,2010,23(3):293-331.
