双馈风电系统全风速下的功率控制策略
2014-05-04李军军易吉良肖强辉
李军军,易吉良,肖强辉
(湖南工业大学电气与信息工程学院,湖南株洲412007)
双馈风电系统全风速下的功率控制策略
李军军,易吉良,肖强辉
(湖南工业大学电气与信息工程学院,湖南株洲412007)
为了实现全风速条件下的功率调节,对双馈风力发电机组的功率控制策略进行了研究。额定风速以下采用基于叶尖速比的最大功率追踪控制,实现最大风能捕获;额定风速以上采用变桨距角控制,输出功率维持恒定,保证整个系统安全稳定地运行。利用MATLAB建模并进行了仿真,仿真结果表明:在较大的风速变化区间内,双馈风电机组能实现对输出功率的有效调节,两种功率控制策略切换时系统能保持较好的稳定性。
双馈风力发电;最大功率跟踪;变桨距角控制;稳定性
0 引言
风能是一种绿色环保的新型能源,近些年已被大规模开发与利用,使得风力发电已成为极具商业化发展前景的发电方式。双馈风电机组通过控制变换器实施交流励磁,可改变转子电流的频率、幅值和相位,实现变速恒频运行。双馈电机转子仅提供转差功率,与转子相连的变换器容量为机组的25%~30%,变换器投资低,非常具有市场优势。
为了提高发电效率,在风速较小的情况下,风电机组通常采用最大功率追踪控制,这方面的研究文献[1-6]较多;但对全风速下的功率控制策略的研究较少。本文对双馈型风电机组在全风速下的功率控制策略进行研究,在较大的风速变化区间内,能实现输出功率的有效调节与控制。
1 双馈风力发电系统
双馈风力发电系统如图1所示,主要由双馈风电机组、双PWM变换器以及电网等部分组成。其中:Ps, Qs, Is表示双馈电机定子输出的有功、无功功率和电流;Pr, Qr, Ir表示双馈电机转子输出的有功、无功功率和电流;Pg, Qg, Ig表示双馈电机网侧变换器输出的有功、无功功率和电流;P0, Q0, I0表示机组向电网输出的有功、无功功率和电流;Ur表示转子侧电压;Ug表示网侧变换器电压;Us表示机组与电网并网点电压;U表示电网电压;Udc表示直流电压;r为电机转子角速度;L0,R0表示网侧变换器滤波电感、电阻;Lt表示线路、变压器折算后电感。
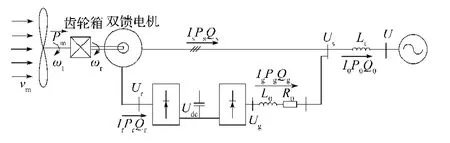
图1 双馈风力发电系统Fig.1Doubly-fed wind power generation system
风轮机输出的机械功率为

R为叶片半径;
vm为作用于叶片的风速;

Cp为风能利用系数,它是和桨距角的非线性函数,
其中c1~c7为常数。
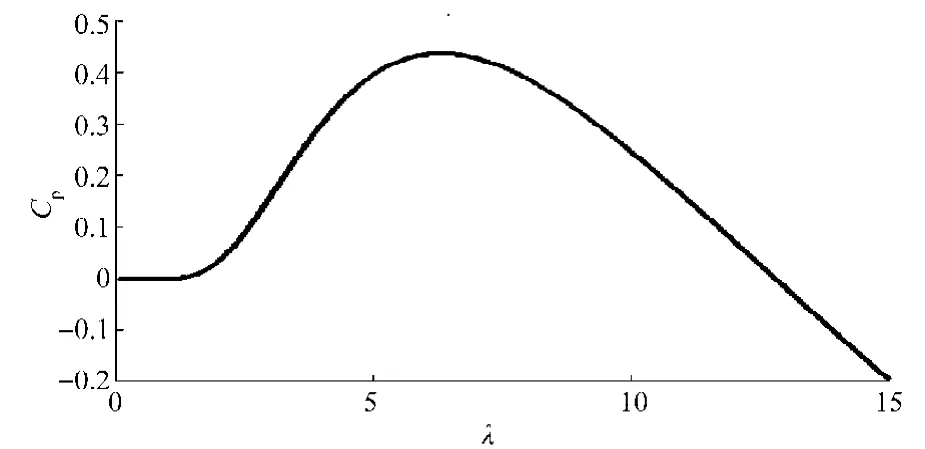
图2 风能利用系数Cp与的关系Fig.2Relationship between wind energy coefficient Cpand
2 机组的功率控制策略
2.1 全风速下的功率控制
风轮机输出功率与风速关系如图3所示。当4≤vm<12时,=0°,按最佳功率控制,输出功率随风速的增大而增大[7-9];当12≤vm≤25时,变桨距恒功率控制,滤除一部分多余的风能,风轮机输出功率保持恒定;低于切入风速4 m/s,风轮机不启动;高于切出风速25 m/s,风轮机停机,以保证整个机组运行的安全性。
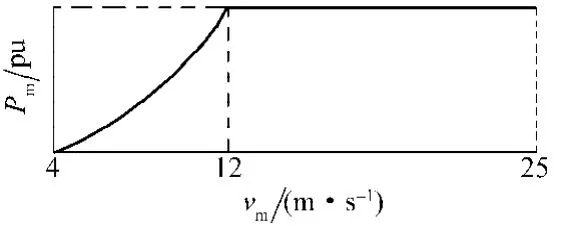
图3 不同风速下风轮机输出的机械功率Fig.3The output mechanic power of wind turbine at different wind speed


图4 叶尖速比控制Fig.4Tip speed ratio control
2.2 桨距角控制
桨距角控制系统结构如图5所示[10]。图中:Pmax为风轮机最大输出机械功率;max和min表示桨距角的最大值和最小值;ref为PI调节器的输出值;Pref为风电功率给定值;P*为经条件判定后的风电功率反馈值;为桨距角机构时间常数。
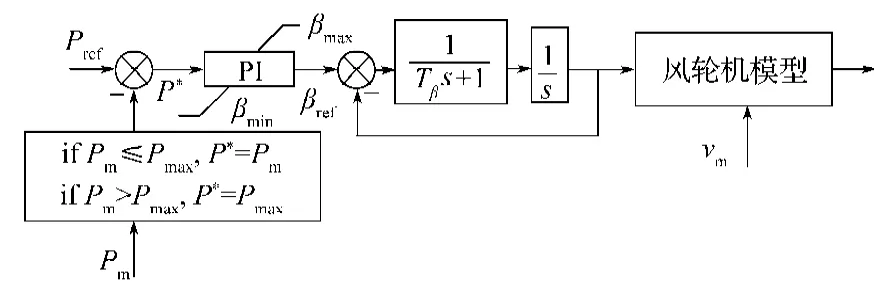
图5 桨距角控制系统Fig.5Pitch angle control system
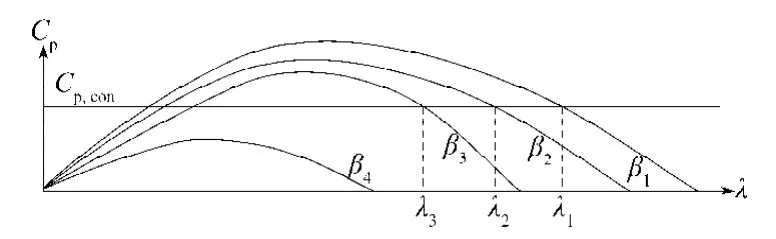
图 6Cp与和的关系Fig.6Relationship betweenCpand ,
采用增量式PI算法,可节省存储空间和计算量,以桨距角表示为

式中:kp为比例系数;Tp为积分时间常数;T为采样周期;e(k),e(k-1)表示第k次和第k-1次的偏差。初始迭代值设为:e(0)=0,e(1)=1,(0)=0。
为加快迭代过程,引入加速因子a,式(5)变为

a值过大将使曲线位于Cp,con直线下方而无交点,迭代过程将进入死循环。通过分析,取a=1.02较合适,可保证较快的收敛速度,避免出现曲线位于Cp,con直线下方而无交点的情况。表1给出了按上述方法计算的额定风速以上时,和t的理论值。由表1可以看出,在额定风速12 m/s以上时,采用变桨距角控制,随桨距角的增大,风能利用系数Cp逐渐变小,而转子转速t变化非常小。
表1 风能利用系数Cp与叶尖速比和桨距角的关系Table 1Relationship between wind energy coefficientCpand tip speed ratio and pitch angle
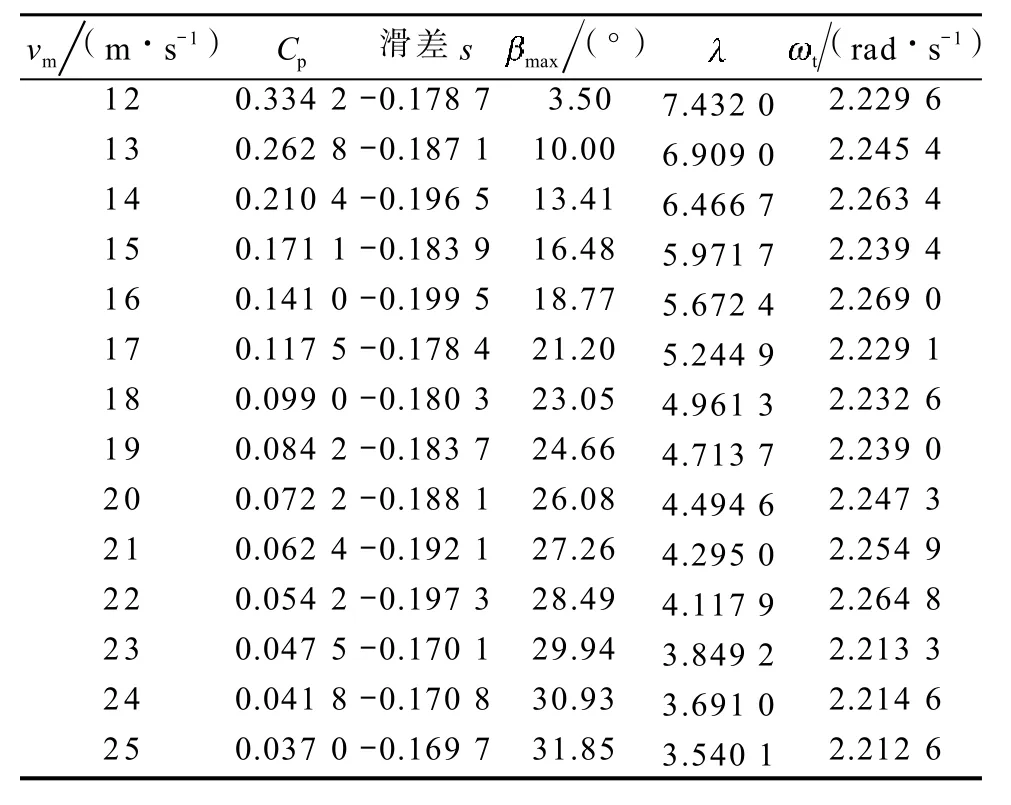
表1 风能利用系数Cp与叶尖速比和桨距角的关系Table 1Relationship between wind energy coefficientCpand tip speed ratio and pitch angle
?
3 双馈机组控制结构
3.1 双馈电机模型
双馈电机在d-q坐标系下定、转子电压方程为
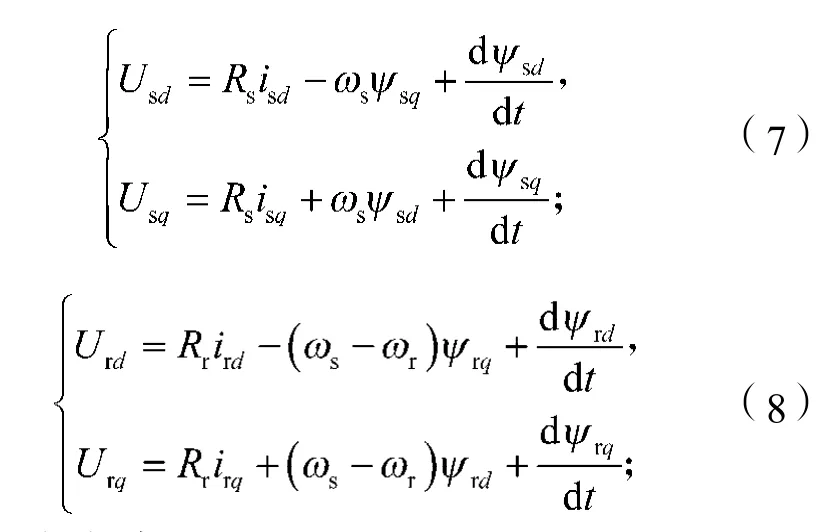
式(9)~(10)中,Lss=Ls+Lm,Lrr=Lr+Lm,其中Ls,Lr为定、转子漏感,Lm为励磁电感。
为了便于分析,设定子磁链与d轴方向一致,忽略定子电阻影响,则如图7所示,s为d轴与A轴间的夹角。
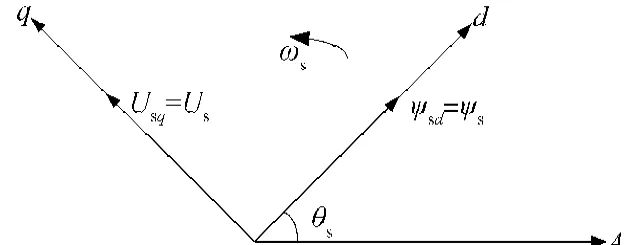
图7 定子磁链示意图Fig.7Stator flux schematic
定、转子电压方程可化简为
式中ims表示定子广义励磁电流[11]。
电磁转矩可表示为

式中p为极对数。
定子输出的有功功率Ps和无功功率Qs为

当ims恒定时,定子输出有功功率Ps与irq成正比,而ird决定定子输出的无功功率,因此分别控制irq和ird可实现有功功率和无功功率的解耦。
转子侧控制系统采用双闭环结构:功率外环和电流内环,如图8所示。
在额定风速以下,功率外环的功率参考值按最佳功率追踪控制确定;在额定风速以上,功率参考值则为常数。图8中的Δud和Δuq为前馈补偿项,用于消除式(11)中的交叉耦合项,解耦后转子方程又可写为
补偿项为

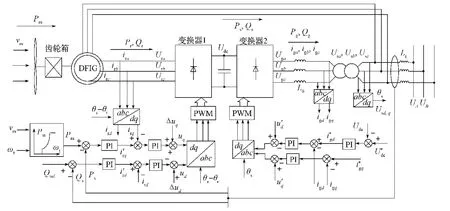
图8 双馈风力发电控制系统Fig.8Doubly-fed wind power generation control system
3.2 网侧模型
对于网侧,当把同步旋转坐标系的d轴取为与电网A相电压向量重合时,网侧变换器输出的有功功率和无功功率分别为

式中igd和igq分别表示网侧变换器输出的有功电流和无功电流,由此可分别控制网侧变换器输出的有功功率和无功功率。
从图1中网侧变换器电路可知,网侧满足:

Ugd和Ugq分别表示网侧变换器输出电压的d, q分量。
从式(18)可知igd和igq存在交叉耦合,也可引入前馈补偿项Δu′d和Δu′q,故式(18)可写为

网侧补偿项为

网侧变换器的控制系统也采用双闭环结构:直流电压外环和电流内环,如图8所示。直流电压外环起稳定直流电压的作用,并为电流内环提供参考电流;电流内环对igd和igq进行控制,以分别控制网侧变换器输出的有功功率和无功功率。
4 仿真
建立仿真模型对理论研究进一步分析和验证。
当风速在0~26 m/s变化时(如图9所示),观察系统的运行情况。
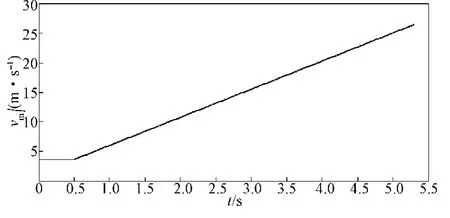
图9 风速的变化Fig.9Wind speed variation
当t约为0.5 s时,风速增至切入风速,风轮机启动。在最佳功率追踪控制策略下,风轮机输出机械功率(如图10所示)、转子转速(如图11所示)、电磁转矩(如图12所示),均随风速增大而增加;当风速在额定风速以上时,上述变量基本维持不变。额定风速以下时,保持opt=6.235(如图13所示),Cp保持Cp,max=0.438 2(如图14所示),能实现最大风能捕获。
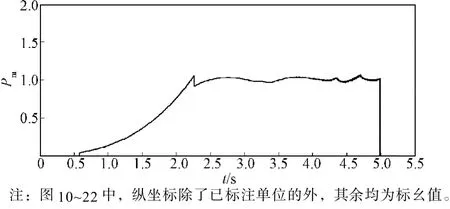
图10 风轮机输出机械功率变化Fig.10The output mechanical power variation of wind turbine
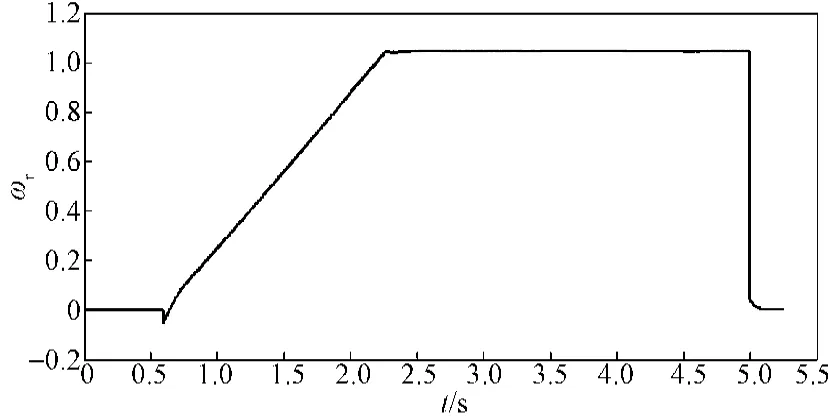
图11 双馈电机转子角转速变化Fig.11DFIG rotor angular speed variation

图12 双馈电机电磁转矩变化Fig.12DFIG electromagnetic torque variation

图13 额定风速以下时叶尖速比的变化Fig.13Tip speed ratio variation under rated wind speed

图14 额定风速以下时风能利用系数的变化Fig.14Wind energy coefficient variation under rated wind speed
当t=2.2 s时,风速增至额定风速,进行变桨距控制,对,及Cp调节,使输出功率维持恒定。,及Cp的变化分别如图15~17所示,和的变化与表1中理论计算的结果值非常接近。
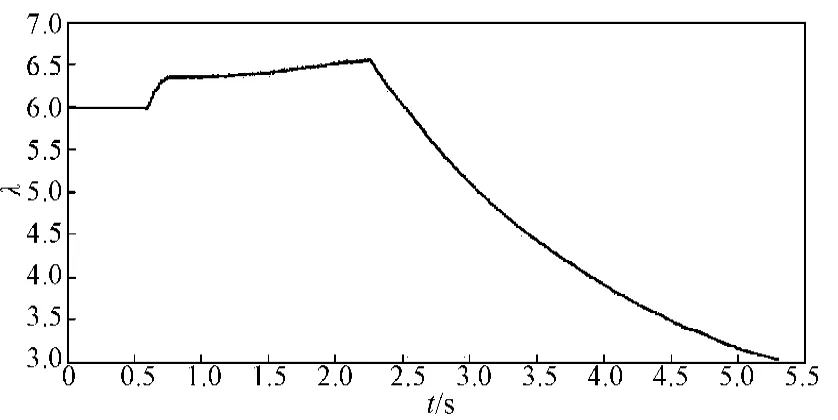
图15 额定风速以上时叶尖速比的变化Fig.15Tip speed ratio variation above rated wind speed
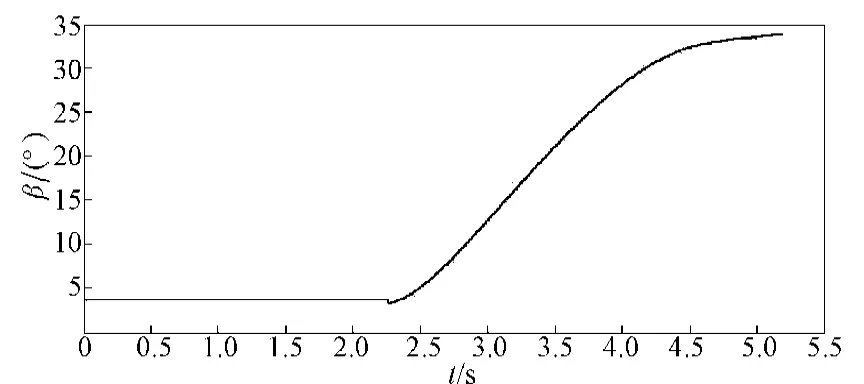
图16 额定风速以上时桨距角的变化Fig.16Pitch angle variation above rated wind speed
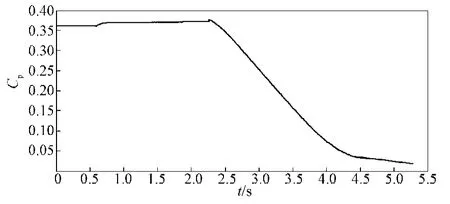
图17 额定风速以上时风能利用系数的变化Fig.17Wind energy coefficient variation above rated wind speed
风速变化的整个过程中,电机定、转子电流变化如图18~19所示,风电系统及机组定子输出功率变化如图20~21所示。由图18~21可以看出,额定风速以下,定转子电流、机组及定子输出功率随风速增加,额定风速以上电流及输出功率基本保持不变。

图18 双馈电机定子电流d, q分量变化Fig.18DFIG stator current d and q components variation
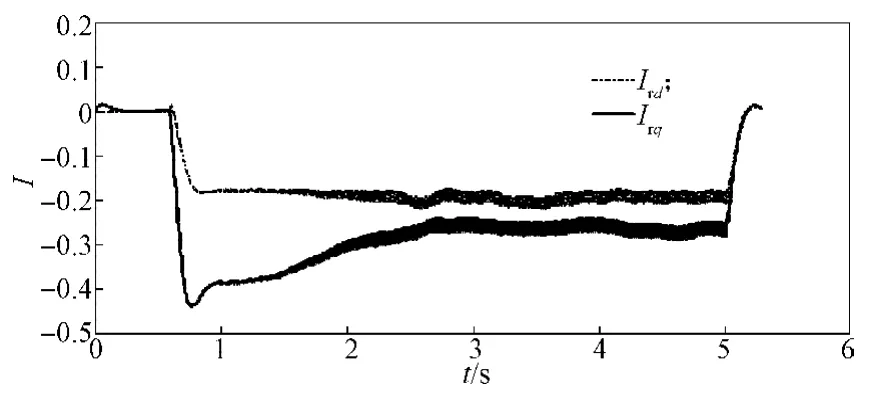
图19 双馈电机转子电流d, q分量变化Fig.19DFIG rotor current d and q components variation
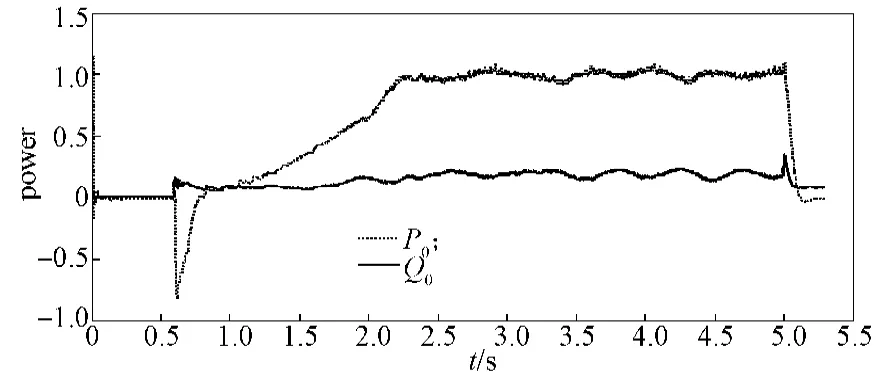
图20 双馈机组系统向电网输送功率变化Fig.20DIFG system transmission power variation to grid
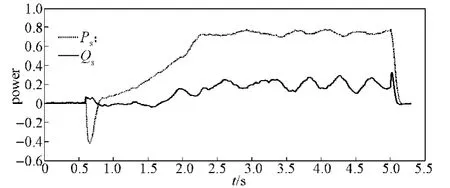
图21 双馈电机定子输出的功率变化Fig.21DFIG stator output power variation
当风速增至切除风速时(t=5 s),机组停机,所有输出为0。整个运行期间,直流电压保持在1 200 V基本不变,如图22所示。由图10~12和20~22可以看出,2种控制策略的切换对系统运行影响较小,在全风速变化区间内,双馈机组均能保持稳定地运行。

图22 直流电压变化Fig.22Direct voltage variation
5 结语
理论分析和时域仿真结果表明:在额定风速以下,采用最大功率追踪控制,可实现最大风能捕获;在额定风速以上,采用变桨距角控制,功率输出保持恒定。2种功率控制策略能保证系统在较大的风速变化范围内实现功率调节和控制,系统运行具有较好的稳定性。
[1]马袆炜,俞俊杰,吴国祥,等. 双馈风力发电系统最大功率点跟踪控制策略[J]. 电工技术学报,2009,24(4):202-208. Ma Yiwei,Yu Junjie,Wu Guoxiang,et al. MPPT Control Strategy for Doubly-Fed Wind Power Generation[J]. Transactions of China Electrotechincal Society,2009,24 (4):202-208.
[2]唐显虎,李辉,夏桂森,等. 双馈风力发电机组并网控制策略及性能分析[J]. 电网与清洁能源,2010,26(3):63-68. Tang Xianhu,Li Hui, Xia Guisen,et al. Analysis on Grid Connecting Control Strategy and Performances of Doubly Fed Wind Turbine Generators[J]. Power System and Clean Energy,2010,26(3):63-68.
[3]嵇伟,张建文,严双喜. 风速对双馈风力发电机并网影响[J]. 电源技术,2013,37(8):1451-1454. Ji Wei,Zhang Jianwen,Yan Shuangxi. Influences of Wind Speed on DFIG Wind-Power Paralleling in Grid[J]. Chinese Journal of Power Sources,2013,37(8):1451-1454.
[4]刘静,黄磊,康忠健. 基于自抗扰控制技术的双馈型感应发电机功率解耦控制[J]. 电机与控制应用,2012,39(1):57-61. Liu Jin,Huang Lei, Kang Zhongjian. Decoupling Control of Power in Double-Fed Induction Generator Based on Auto-Disturbance Rejection Control Technology[J]. Electric Machines & Control Application,2012,39(1):57-61.
[5]刘远涛,杨俊华,谢景凤,等. 双馈风力发电机有功功率和无功功率的滑模解耦控制[J]. 电机控制与应用,2010,37(4):39-43. Liu Yuantao,Yang Junhua,Xie Jingfeng,et al. Sliding Mode Power Decoupled Control of Active and Reactive Power in Doubly Fed Wind Power Generator[J]. Electric Machines & Control Application,2010,37(4):39-43.
[6]赵广宇,潘磊. 双馈风电机组无功调节性能概述[J]. 风能,2013(2):84-87. Zhao Guangyu,Pan Lei. Reactive Power Regulation Performance of Double-Fed Wind Turbine[J]. Wind Energy,2013(2):84-87.
[7]殷明慧,蒯狄正,李群,等. 风机最大功率点跟踪的失效现象[J]. 中国电机工程学报,2011,31(18):40-47. Yin Minghui,Kuai Dizheng,Li Qun,et al. A Phenomenon of Maximum Power Point Tracking Invalidity of Wind Turbines[J]. Proceeding of the CSEE,2011,31(18):40-47.
[8]程启明,程尹曼,汪明媚,等. 风力发电系统中最大功率点跟踪方法的综述[J]. 华东电力,2010,38(9):1393-1398. Cheng Qiming,Cheng Yinman,Wang Mingmei,et al. Review on the Method of Tracking the Maximum Power Point in Wind Power Generation System[J]. East China Electric Power,2010,38(9):1393-1398.
[9]陈毅东,杨育林,王立乔,等. 风力发电最大功率点跟踪技术及仿真分析[J]. 高电压技术,2010,36(5):1322-1326. Chen Yidong,Yang Yulin,Wang Liqiao,et al. Maximum Power Point Tracking Technology and Simulation Analysis for Wind Power Generation[J]. High Voltage Engineering,2010,36(5):1322-1326.
[10]Mauricio J M,Marano A,Gómez-Expósito A,et al. Frequency Regulation Contribution Through Variable Speed Wind Energy Conversion Systems[J]. IEEE Transactions on Power Systems,2009,24(1):173-180.
[11]刘鑫,曲延滨. 双馈风力发电系统最大功率追踪双模控制研究[J]. 电气传动,2013,43(6):20-23. Liu Xin,Qu Yanbin.Study on the Dual-Mode Control Used in Maximum Power Point Tracking Control of Doubly Fed Wind Power Generation System[J]. Electric Drive,2013,43(6):20-23.
(责任编辑:邓光辉)
Power Control Schemes of Doubly-Fed Wind Power Generation System under Full Wind Speed Condition
Li Junjun,Yi Jiliang,Xiao Qianghui
(School of Electrical and Information Engineering,Hunan University of Technology,Zhuzhou Hunan 412007,China)
Power control methods of doubly-fed wind power generation sets were researched in order to realize power adjustment under full wind speed condition. Maximum power point tracking control based on tip speed ratio was adapted under the rated wind speed and maximum wind energy capture was realized; variable pitch angle control method was applied to system above the rated wind speed and output power was kept constant to ensure whole system safe and stable operation. Simulation by MATLAB shows that the double-fed induct generator sets achieved effective adjustment of output power in a large wind speed variation section, and the system keep good stability when the two power adjustment methods switched.
doubly-fed wind power generation;maximum power point tracking;variable pitch angle control;stability
TM614
A
1673-9833(2014)04-0046-07
10.3969/j.issn.1673-9833.2014.04.011
2014-04-03
湖南省高等学校科学研究基金资助项目(12C0055),湖南省省市联合自然科学基金资助项目(12JJ9042)
李军军(1976-),男,江西宜春人,湖南工业大学讲师,博士,主要研究方向为风力发电及其稳定性,E-mail:lijunjun8181972@sina.com
