遥感卫星高精度指向跟踪控制策略研究
2014-05-03雷志刚
雷志刚
(中国电子科技集团公司电子第39研究所,西安 710065)
遥感卫星高精度指向跟踪控制策略研究
雷志刚
(中国电子科技集团公司电子第39研究所,西安 710065)
本文提出了遥感卫星高精度指向跟踪控制策略,阐述了具体实现方法,实现了对高仰角、高动态目标的全空域无盲区可靠捕获及稳定跟踪。
指向;跟踪;控制;高精度
1 引言
随着遥感卫星在资源探测、天气预测、海洋观察、减灾等方面的广泛应用,对天线伺服系统在实现目标全空域搜索、捕获、自动跟踪、过顶跟踪等方面提出了更高的要求。本文研究遥感卫星高精度指向跟踪控制策略,实现目标的高精度指向控制、快速捕获及高精度高动态全空域无盲区稳定跟踪。
2 需求分析
遥感卫星天线伺服系统主要用于跟踪太阳同步轨道低轨遥感卫星,其轨道高度一般为300km~800km之间。
太阳同步轨道卫星目标运动特征一般为近圆轨道,在航捷点附近假定目标水平飞行,轨道高度为h,目标的速度为Vt,天线的方位角速度为ωA,角加速度为、,目标和观测站的关系如图1所示。

图1 观测站与运动目标位置关系
则:
式中:Rc=测站天线离目标飞行地面轨迹的最近距离;
设:卫星轨道高度:h=300Km,地球半径:Re=6378.14Km

为了保证过顶时跟踪精度,伺服系统的位置环等效加速度误差系数Ka必须达到70(1/s2)以上才能满足精度要求。从目前的设计、加工水平看,要达到是不可能的,因此伺服系统必须采用速度前馈复合控制技术提高伺服系统等效Ka≥70,才能保证过顶跟踪精度的实现。
3 方案设计
天线伺服控制系统主要包括天线控制单元(ACU)、天线驱动单元(ADU)、轴角编码单元(PDU)、驱动电机、测角元件、控制保护逻辑等组成。
天线控制单元(ACU)是伺服系统的控制中心。它完成天线运动的各种控制以及各种控制策略的实时计算与实施,最终完成天线对目标的精确跟踪。
天线驱动单元(ADU)主要由驱动功放、环路控制与保护电路及安装在天线上的执行电机、传感器等构成,主要完成功率放大、能量转换,最终驱动天线转动。
轴角编码单元(PDU)获得精确的位置角度信息。
4 控制策略
4.1 采用高精度的轴角编码器
高精度的轴角编码是一切高精度控制的基础,该精度的编码精度才能满足控制系统指向精度以及捕获跟踪的要求。
旋变采用高精度,全范围内可以保证在5"以内,该旋变为双通道旋变发射机精粗比为64:1。编码芯片采用高精度RDC转换器,它能够直接将来自测角元件即分解器或同步机的被角度调制了的交流信号转换成二进制数字角度值。
4.2 精确的引导数据计算
天线在程序跟踪工作方式时,由于指向误差的客观存在,即使轨道预报数据非常精确,天线也无法准确对准目标。其中指向误差中的系统误差可以通过对轨道预报数据或角度编码数据反修正加以克服,从而提高指向精度。
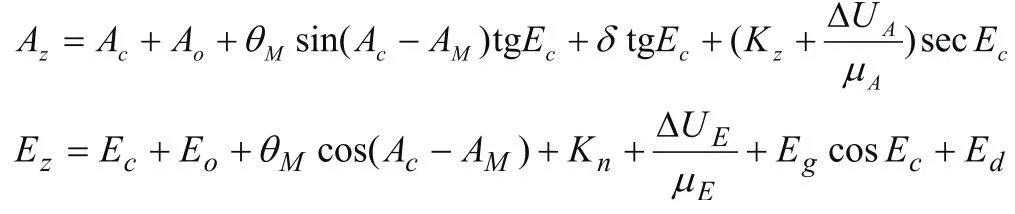
计算好的引导数据在用于天线引导前,还要进行轴系误差的反修正,反向修正的内容包括天线编码器零位误差、天线重力变形误差、天线大盘不水平误差、方位、俯仰轴不正交误差、天线光电轴失配误差,修正后能够保证天线指向更精准。具体的修正方法是根据系统误差模型:
稳定跟踪低频段过境卫星,通过计算的卫星指向数据和实际的轴角编码数据进行对比求差。经过多次的跟踪,获得大量的误差数据,依据系统误差模型采用最小二乘法对误差曲线进行拟合,求出各误差系数。求出各误差系数后,采用该系数对天线实际指向进行修正。
4.3 提高天线控制单元实时控制频率
提高天线控制单元实时控制频率,能够使位置环路的超调明显减小,对于精确的天线指向控制将有明显的改善作用。另外高的采样率也使一些如算法复合前馈、计算机辅助跟踪等算法的精确性进一步提高,对于天线指向、跟踪精度有较大的改善作用。
在天线控制子系统中具有很高的实时性。采用高速同步串口(SSI)完成与轴角编码单元、跟踪接收机的数据交换,每个数据通道的数据交换时间小于300ns;通过以上措施的采用,控制系统的控制周期可以控制在10ms以内,数据刷新率可以达到100Hz,提高了位置环路带宽,有效减小跟踪目标时的动态滞后,使对动态目标的跟踪更可靠有效。
4.4 使用目标前馈的位置复合控制
传统的位置环路调节器采用PID算法进行环路控制,根据工程经验,在没有复合控制(FF)的前提下,某口径天线系统的加速度误差系数(Ka)一般能达到6左右,这样的指标是远远不够的,目标过顶前后速度和加速度的急剧变化会使天线不能精确对准目标。
采用了目标前馈的位置复合控制,实际上是PID调节器的一种改进形式,在PID调节器的环路之外,将目标位置进行微分等处理,提取速度分量信息,使PID调节器能够适应目标速度的变化,实现稳定、精确的指向控制。采用目标前馈复合控制算法后,系统的加速度误差系数大大提高,显著提高了位置控制精度。
5 结论
采取以上控制策略的高精度指向跟踪控制系统已广泛应用在遥感卫星全空域捕获跟踪系统中,实现了对高仰角、高动态卫星的保精度跟踪,取得了预期成果,可在我国新一代低轨遥感卫星天线伺服系统中推广应用。
[1]谢剑英.机算机控制技术[M].国防工业出版社,1985年.
[2]陈伯时.自动控制系统[M].机械工业出版社,1981年.
[3]胡寿松.自动控制原理[M].国防工业出版社,1984年.
[4]蒋力.目标过顶的程序跟踪控制技术[J].电子技术应用2005-9.
