位移传感器在TRM辊磨上的应用
2014-04-25邵树杨赵贺楠丁再珍宋小鹏
邵树杨,赵贺楠,丁再珍,宋小鹏
位移传感器的工作原理是,将传感器和磁块分别安装在摇臂轴承座和摇臂上,通过摇臂带动磁块运动,摇臂运动的位移经过传感器感应后输出4~20mA的电流值,换算后经过DCS传输到中控画面上,从而使中控操作员获得准确的料层厚度。由于位移传感器侦测的是料层厚度(即磨机运行时磨辊与磨盘之间的距离),而摇臂的位移波动与料层厚度之间并不是对等的关系,所以在中控程序中设定4~20mA对应的位移量程时需要进行校对和计算,具体方法将在下文中阐述。
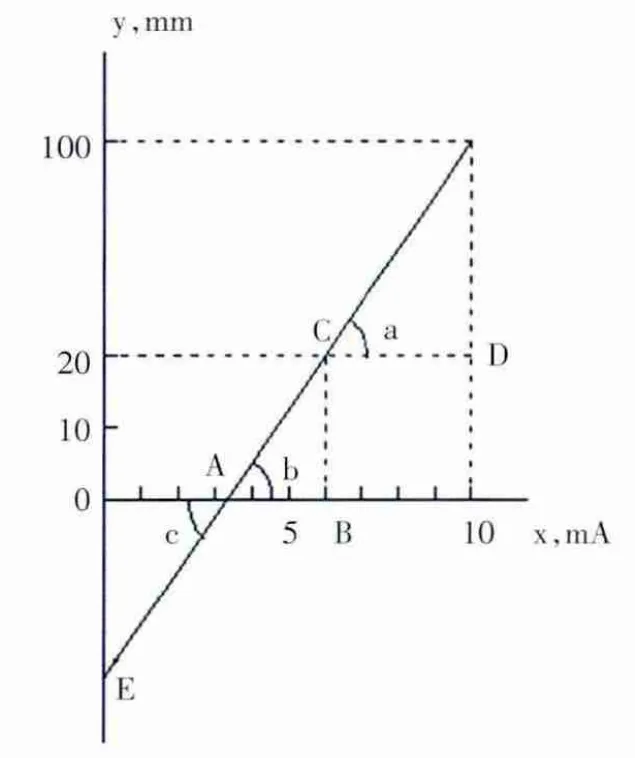
图1 位移与电流的关系
该位移传感器安装简单方便,主要包括传感器支架、磁块、传感器主体、磨辊高低限位开关。其中支架由中材装备集团有限公司设计和供货,适用TRM所有型号磨机。现场可根据图纸和说明书进行安装。
在电缆布线时,应尽量避开电磁干扰源,以免对传输的信号造成干扰,影响测量的准确性;在选择电缆时,应选择带有屏蔽层的电缆,电缆长度最好不要超过20m;在干扰无法完全避免时,可以通过屏蔽层接地、增加隔离器等方式解决。
安装完毕后,需要对传感器进行调试和量程的计算。位移传感器磁块移动长度为150mm,输出信号为4~20mA,下面通过举例来说明计算方法:
分别在磨辊下方垫20mm和100mm的钢板,测出位移传感器的输出电流为6mA和10mA,得到图1。
斜线的斜率:
k=tana=(100-20)/(10-6)=20
∵∠a=∠b=∠c
∴tana=tanb=tanc
BC=20,可以求出AB=BC/k=1,OB=2,则有OA=OB-AB=1。
OE=k×OA=20
E点为y轴负向,故电流4mA对应的值为-20mm。
20mA对应的值为(16-1)×20=300mm。
在磨辊与磨盘距离为20mm和100mm,输出电流为6mA和10mA的情况下,DCS设定量程时应为-20~300mm。
通过监测料层厚度的变化趋势可以及时调整喂料量、研磨压力,对即将发生的磨机振动提前做出判断并调整,降低磨机跳停或抬辊的几率。
根据现场实际运行情况,矿渣磨粉磨时,其料层厚度一般在30mm左右,粉磨水泥一般在40mm左右,安装位移传感器后,通过监测,可以由中控画面上实时观察到料层厚度变化。
当料层太厚时,磨机研磨效率下降,粉磨成品率低,磨内压差增大,磨机稳定性差,容易振动,系统负荷增大,电耗增加。导致料层太厚的原因包括喂料量过大、研磨压力偏低、挡料圈过高等。
当料层过薄时,会导致磨机振动,对设备造成伤害。导致料层过薄的原因包括喂料量偏低、喂料系统堵料、研磨压力大、挡料圈偏低等情况。
通过实时监测料层厚度,操作员可以对操作进行预判,更好地提高磨机的运转率,减少停机次数,设备管理人员也可以通过料层厚度来调整挡料圈高度,使磨机的研磨效率达到理想状态,提高产量,降低电耗。
