电动汽车机器人自动换电装置
2014-04-20黄坤
黄 坤
(安川首钢机器人有限公司, 北京,100176)
电动汽车机器人自动换电装置
黄 坤
(安川首钢机器人有限公司, 北京,100176)
本文介绍一种应用于新能源电池的电动汽车机器人自动换电装置。其中,机器人抓手采用内置滚珠直线运动结构及视觉装置,利用视觉传感器检测位置误差进行动作补偿、反馈控制机器人抓手的动作,具有精度高、控制方便的特点;外置行走机构采取水平结构并且沉于地下,利用机器人外部轴控制机器人的位置,从而使机器人抓取电池及装卸电池更加精确,拓展了作业空间;转运平台作为换电装置内外结合的关键点,实现了双手交叉作业模式,提高了作业效率;码垛装置利用伺服驱动,可以方便、快捷地取放电池。整套换电装置工作方式新颖,降低了劳动强度,提高了工作效率。
机器人,新能源,自动换电,视觉
0 引言
随着环境的变化,人们对各类生产、消费的节能减排要求越来越高,绿色能源的开发成为动力发展的主旋律。电动车辆使用电动机作为原动机,具有零排放、噪声小、舒适干净、易于操纵和维护的特点,作为清洁、低碳、绿色环保的代步工具,其能源问题受到世界各国的极大关注。电池作为电动车辆最为核心的部件,需要经常进行充电或者更换电池,以保证电动车的续航能力。因此,电池的换电方式直接影响电动车辆使用的方便性。
目前市面上更换电池设备通常采用半自动和人工方式进行,虽然人工参与加大了电池更换的灵活性,但这种方式效率低下,成为制约人们使用电动汽车和产业发展的一大屏障。为解决这一难题,安川首钢机器人有限公司于2012年开发出应用于电动汽车的机器人自动换电装置,
1 换电装置系统布局
装置三维总体布置图见图1所示。
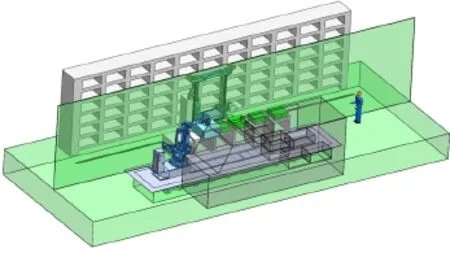
图1 总体布置图
整个装置采用双工位布置,分别应用于电动车两侧的电池更换,通过抓手视觉装置测试计算出电池端面到抓手端面的距离,然后由机器人自动调整抓手姿态进行解锁、取出电池。机器人换电装置负责将电池在电动车和转运机构之间进行转移,码垛装置负责将电池在转运机构和充电架之间进行转移。整个装置大大提高了电池更换效率,具有结构简单、效率高的特点。
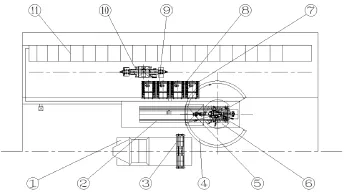
图2 装置布置图
本装置主要由2台MOTOMAN-UP350D-600机器人、2套行走机构、2套车体定位机构、2套电池抓手、2套转运机构、2套码垛装置、2套充电仓架、2台工控机及1套电控装置构成。
UP350D-600机器人是日本MOTOMAN最新研制的特别适合于搬运的新型机器人(见图3)。它的动作速度、精度及可靠性具有国际先进水平。该机器人配合以MOTOMAN在2010年推出的DX100新型机器人控制柜,可实现很快的动作,大大降低了各种应用的生产周期,提高了生产率。同时,其超大的工作半径(2542mm)也保证了电动车在不同位置上,机器人均有最佳的搬运姿态。
需要强调的是,在实际现场中,电动车的停车位置不是精确固定的,每次停车的位置大约在中心位置的5°范围内,这时需要通过机器人抓手的视觉检测装置进行识别,从而实现自动定位、抓取电池并且实现快速更换。
系统对机器人、控制柜及移动部分安装了安全防护装置,使整个装置处于安全的操作环境中,提高了装置的安全性。
整个装置具有特点如下:
1)机器人与伺服抓具的系统结构,具有牢固、空间布局合理、操作方便的特点。
2)人机交互界面与机器人结合,便于用户操作,符合人体工学原理,并具有一定的防护等级,充分保证用户人身的安全。
3) 整体结构为模块化设计,兼容性强,可根据用户需要配置换电单元数量。
4) 充分利用环卫车的统一接口,可以将电动汽车换电系统更为普遍地进行推广,满足充电站快速网络化布局的需要,实现资源的重新整合,给车辆快速进行能量补给,有着广阔的市场应用前景。

图3 UP350D-600
2 电池抓手
电池抓手的设计如图4所示。
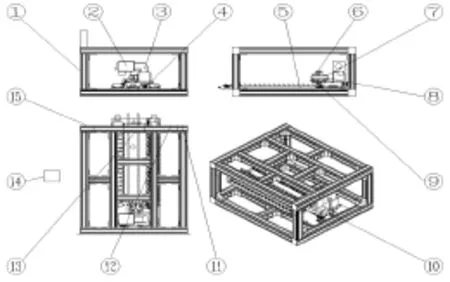
图4 电池抓手
整体抓手装置由1个伺服行走、2个气动解锁机构组成,可使机器人对电池的抓取姿态进行实时控制。
电池抓手特点如下:
1)内置行走机构由机器人外部轴电机驱动,定位精度高,满足机器人协调动作需要。
2)铝型材框架设计减轻了重量,有利于装置运行的稳定性。
3)视觉安装便于维护。
4)可以实现多种端面相同、长度不同的电池类型的抓取。
3 行走机构
本装置采用了水平行走机构,整个行走机构沉降到地下,这种布置可以方便机器人现场维护,为人工应急提供有效的操作空间。
由于采用了机器人外部轴伺服驱动,可以精确控制电池抓手的位置,便于精确定位电池抓手与电动车及转运机构的接触位置。
考虑到现场处于双向通风的特殊环境,电动车可能因为天气等因素给现场带来雨水积雪等,这会对换电设备造成危害,所以,整个系统为行走机构的滑块和导轨安装了防护装置,避免雨雪等落在导轨面上,减少了滑块损坏的几率。
4 转运机构
由于转运机构是处于机器人和码垛装置之间的关键传输工具,因此,转运机构被分为A工位和B工位,以适应机器人和码垛机双手交叉的作业模式。
当电动车就位后,机器人通过电池抓手将电动车上的电池取下来。接着,机器人将取下来的电池放置到转运机构B工位上,同时将已经放置到转运机构A工位上的充好电的新电池取出,转移到电动车上,从而实现对电动车的电池更换。
每当有电动车就位并得到启动换电信号后,机器人自动将旧电池放置到转运机构B工位上,同时码垛装置自动将换下的旧电池从转运机构B工位上取下并转运到充电仓架上,再将充电仓架上已经充好电的新电池转运到转运机构A工位上,以备下次更换时使用。
码垛装置和机器人采用双手交叉作业模式,这有效地提高了工作效率,降低了劳动强度。
5 码垛装置
由于码垛装置的两侧取放位置是固定的,所以采用XYZ伺服运动方式,与电动车位的机器人形成左右手模式。
该装置由3个伺服电机、齿轮齿条机构、位置检测机构、双向电池仓及外围框架构成,配合充电仓架,形成了一套简单而实用的电池取放系统,为快速提供充满电量的电池出入库提供了必要条件。
6 结论
本文介绍了一种用于新能源的机器人自动换电装置,着重对装置的布置形式、结构特点、可靠性进行了说明。该装置解决了电动汽车充电等候、电池不合理保温充电等问题,鉴于原有的电池标准不统一和电池仓的结构不统一,机器人自动换电装置统一了设计标准,已经应用于环卫电动车车型,可以使快速换电站能够深入到城市的各个电动车集中地带,解决了电动车快速便捷的换电需求。

图5 机器人自动换电实景
此装置在国内率先开辟了机器人在电动车自动换电领域的应用,标志着新能源换电自动化、管理精细化上迈出了新的步伐,同时又是电网资源的合理利用,是电网企业优质服务、绿色环保服务的进一步延伸,对提高换电效率、降低原材料消耗和职工劳动强度等方面具有重要意义。
