基于3维激光扫描技术建筑物建模研究
2014-04-19张会霞
张会霞
(太原师范学院地理科学学院,太原030012)
引 言
地面3维激光扫描技术是一项新兴的测绘新技术,已成为空间数据获取的重要技术手段。同传统的测量手段相比[1],3维激光扫描测量技术拥有许多独特的优势:(1)数据获取速度快、实时性强;(2)数据量大、精度高;(3)主动性强,能全天候工作;(4)全数字特征,信息传输、加工、表达容易等,获取的3维数据精度高[2]。
地面3维激光扫描系统获取的建筑物点云数据,可以用来构建建筑物的3维模型,针对3维建筑物建模的研究,武汉大学LI等人[2]利用车载激光扫描数据进行了建筑物特征提取研究,提出了一套基于建筑物几何特征的信息挖掘方案,可以直接从激光扫描数据提取建筑物的平面外轮廓信息。LU等人[3]应用平面分割和Hough变换对目标物识别并提取特征点、线、面,建立3维模型。YU等人[4]采用平面拟合算法提取出特征点,进而提取出特征线。这些自动建模的研究离实际应用都还有一定的距离,针对3维激光扫描数据的建模,目前主要是在AutoCAD软件下线划模型的构建。
本文中探讨了3维激光扫描技术从数据获取到建模的理论和方法,通过对校园建筑物扫描、数据处理,最终获得了建筑物的3维模型,采用不同的方法对建筑物进行建模,通过对比分析得出最佳的建模方法,并对3维激光扫描数据建模的应用前景进行了展望。
1 3维激光扫描系统的基本工作原理
3维激光扫描仪根据测量原理可分为脉冲式3维激光扫描仪和相位式3维激光扫描仪。脉冲式3维激光扫描仪测量距离长,相位式3维激光扫描仪测量速度快。相位式测距是利用激光光线的连续波发射,根据光线干涉原理确定干涉相位的测量方法,基于相位测量原理主要用于中等距离的扫描测量系统中,它的精度可以达到毫米量级,扫描范围通常在100m内。
地面3维激光扫描系统由3维激光扫描仪和系统软件、电源以及附属设备构成。3维激光扫描仪的原始观测数据主要包括:(1)激光束的水平方向角α和竖直方向角θ,这两个角是根据两个连续转动的用来反射脉冲激光的镜子的角度值得到的(如图1所示);(2)仪器到扫描点的距离s,这是根据激光传播的时间计算得到,再根据激光束的水平方向角和垂直方向角,可以得到每一扫描点相对于仪器的空间相对坐标值;(3)扫描点的反射强度f等。点的数据结构为(x,y,z,f),不仅包含点的空间位置还包含点的反射强度[5]。
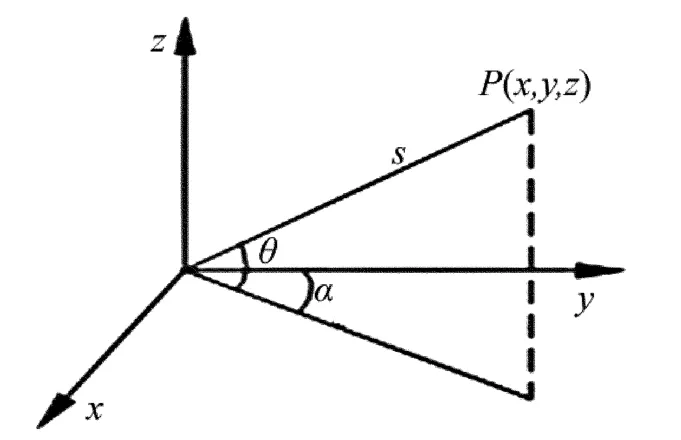
Fig.1 Positioning principle of ground 3-D laser scanning system
3维激光扫描点的坐标(x,y,z),计算公式为:
2 3维激光扫描数据获取与处理
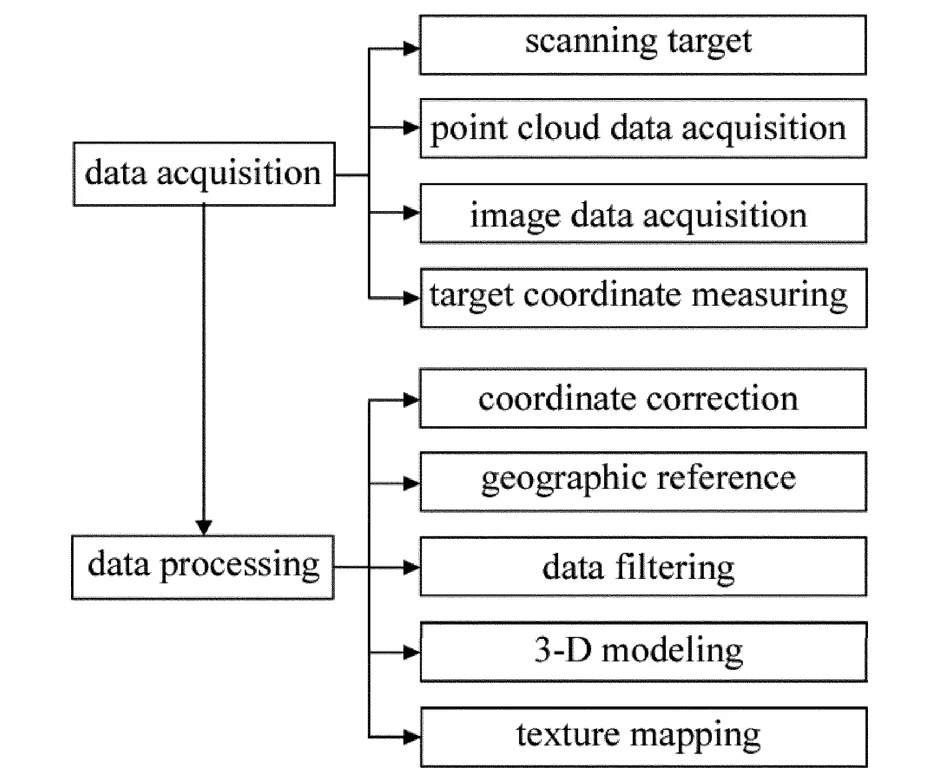
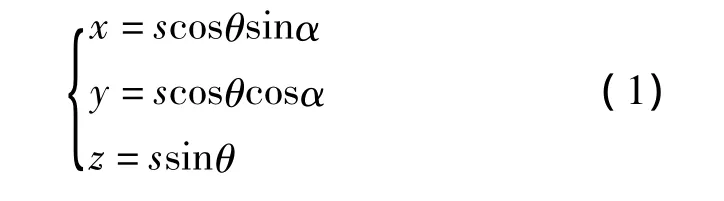
Fig.2 3-D laser scanning data acquisition and processing chart
3维激光扫描测量时,一般需经过两个阶段:(1)数据获取;(2)数据处理。其中数据获取前需要对现场进行勘踏,制定扫描路线,确定测站与标靶的位置及数量,再进行扫描。数据获取需扫描标靶点云数据、目标物点云数据、有内置相机的扫描仪还可获取目标物纹理信息、需增加地理参考的可采用全站仪获取标靶的大地坐标;数据处理主要包括坐标纠正、地理参考、数据滤波、3维建模、纹理映射等操作。图2为3维激光扫描数据获取与处理的流程。
2.1 数据获取
本文中采用Leica公司生产HDS6000 3维激光扫描仪(如图3所示)和系统软件CYCLONE在笔记本电脑的控制下进行扫描。在每一测站建立电脑与扫描仪的连接,设置采样间隔、扫描距离等参量,先扫描标靶的坐标,再扫描建筑物,获得建筑物和标靶的采样点点云图,由于HDS6000 3维激光扫描仪的扫描有效距离只有50m,本项目共扫描13站。为了把仪器坐标系下的点云数据纠正到大地坐标系下,采用全站仪测量标靶坐标,获得标靶点(x,y,z)坐标。图4是建筑物一侧的点云图。

Fig.3 HDS6000 3-D laser scanner
Fig.4 One side of the point cloud image of campus buildings
2.2 数据处理
数据处理指的是直接在点云数据上的操作,建立建筑物的3维模型必须经过一系列的数据处理,主要包括坐标纠正、数据滤波等操作。
2.2.1 坐标纠正 坐标纠正又称为坐标配准,获取的多站点云数据,由于每一站数据的坐标系都是采用本站的仪器坐标系,配准时需要把不同仪器坐标系下的数据纠正到同一仪器坐标系下。需要用大地坐标系时,还需增加地理参考。坐标纠正可采用七参量算法[6]。实现两幅相邻点云图的配准,只需要选取3个以上已知坐标值的同名点,就可求出一幅点云图的点在相邻坐标系下的坐标。
采用CYCLONE软件的Registration模块完成点云的坐标纠正。坐标纠正可以采用标靶进行纠正,也可采用点云进行纠正,前者误差通常为2mm~3mm,后者误差通常超过1cm。通过选取3个以上的同名点对建筑物点云数据进行纠正,可选用两两测站进行纠正,再把纠正好的结果进行纠正,减少误差的传播。为了获得点云数据在大地坐标系下的坐标,需要增加地理参考,把全站仪测量下的标靶坐标当做一个测站,把纠正好的点云数据纠正到大地坐标系下。图5为纠正好的建筑物点云图。
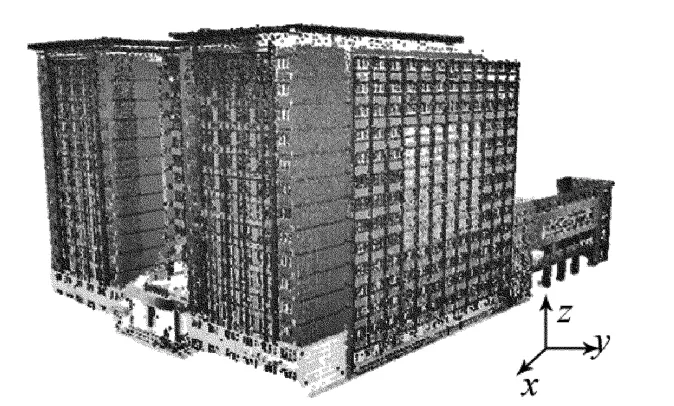
Fig.5 Correct and filtered point cloud of campus buildings
2.2.2 数据滤波 扫描过程中受到各种人为的或随机因素的影响,噪声点难免混在了点云数据中,常见的误差有两类:(1)系统本身因素引起的误差,通常采用算法减少噪声点,常用的滤波方法有高斯滤波、中值滤波、平均滤波[7];(2)突发因素引起的噪声,如扫描时建筑物前面存在树木、路灯、行人、车辆等,就会在扫描图上存在无用的点云,通过对点云的分割和滤波,在CYCLONE软件的ModelSpace模块下,采用人工交互的方法,如选取点云数据,手工删除。除去各测站点云的噪声点,提取出目标物。图5为消除噪声后建筑物滤波的结果。
3 3维建模与纹理映射
3维激光扫描技术一个重要应用是3维建模,3维激光扫描仪获取的点云数据,经过坐标纠正、滤波,提取出建模所需要的数据,该数据可用于建筑物模型的构建。建立实体或表面模型后,为了增加模型的逼真性,通常3维实体模型上增加纹理,使其成为具有真实纹理的3维模型。用图像来替代目标物模型中的细节,提高系统显示速度。如建筑物纹理映射,建筑物表面不仅仅是简单的墙面,还有门、窗以及其它复杂表面,如果都采用3维模型来表示,将大大增加数据量,影响系统的运行速度,建筑物模型的细节通过纹理映射的方法来模拟出,则兼顾系统对速度和模型对逼真度的要求。
3维激光扫描仪获取的点云数据可采用以下3种方法进行建模:(1)采用扫描仪自带的系统软件进行建模,如莱卡公司的3维激光扫描系统软件CYCLONE软件;(2)采用AutoCAD软件进行建模;(3)采用第3方建模软件如3DS MAX、SketchUp等来完成建模、纹理映射等。
3.1 系统软件下建筑物的建模
系统软件CYCLONE是利用分割技术,把建筑物分为不同的墙体,主要采用区域增长法进行面的拟合;对于不规则几何体,如曲面,通过构建三角网对物体表面进行逼近;对于规则几何体,如圆柱等,采用点云匹配算法进行拟合[8-9]。CYCLONE软件的建模,是在其ModelSpace模块下完成。在扫描仪获取的建筑物点云数据上建模主要有以下步骤:(1)定义坐标系;(2)建立参考面;(3)绘图;(4)图形转成面;(5)去除窗户部分面;(6)增长厚度。图6为CYCLONE软件下建立的建筑物外表面模型。
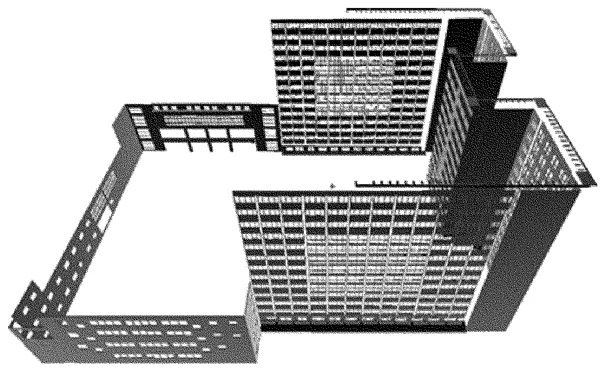
Fig.6 Outside surface model of building with CYCLONE software
3.2 AutoCAD软件下建筑物的建模
建筑物由于结构的特殊性,测绘领域目前的建模通常是把点云数据导入到AutoCAD软件下,提取建筑物边界点、特征线等信息,画出建筑物的特征线。该软件下的建模,通常也只是线划模型,建模工作量大,没有面,只是线条勾勒出建筑物的墙体、门、窗等边线。该软件下不能进行纹理映射,但可绘制横断面图,用于建筑的施工。
3.3 专业建模软件下建筑物的建模
采用Google SketchUp软件建立模型,该软件避免了同类设计软件3DS MAX,AutoCAD等的复杂性,其易操作性为建模人员节省了大量的时间。优良的材质贴图系统能很好地表现建筑物模型的质感、增加模型的美观[10-11]。该软件不仅可以进行现代建筑的建模,还可进行古建筑的建模,为3维激光技术在古建筑方面的建模也提供了好的技术手段。
CYCLONE软件处理好的点云数据,可以通过Cloudworx插件导入到AutoCAD软件,保存成DWG格式文件,在SketchUp Pro 8.0下导入DWG格式的点云数据,进行建模。通过在建筑物点云数据上进行精确的尺寸量测,绘制出墙体、窗户、门等模型,并进行纹理映射即贴图处理。利用复制等功能,快速的建好模型。图7为SketchUp软件建立的校园建筑物模型。
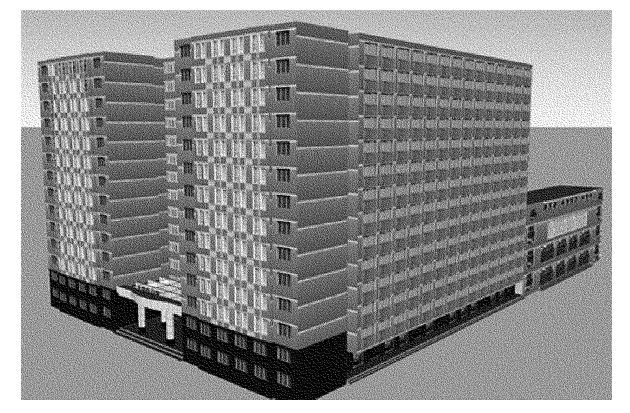
Fig.7 Building model with SketchUp software
3.4 建模效果的比较
(1)从以上模型的效果看,系统软件CYCLONE建立的模型不能进行纹理映射,仅仅建立了建筑物的外表面模型。该软件仅能给点云数据上映射纹理,不能给模型进行纹理映射,只能进行单色的渲染。建模的效率较高、工作量较大。
(2)AutoCAD软件建立的模型也不能进行纹理映射,该软件下的点云数据的建模都是线划模型。该建模方法复杂、工作量大、效果不是很好。如果用于提取建筑物的横断面、纵断面,效果较好。
(3)采用SketchUp软件进行建模,建立的建筑物模型更逼真,可以进行纹理映射。数据量也不大、精度更高、尺寸更精确。建立的模型可用于数字校园中,如在3维可视化软件ARCGIS下进行数字校园3维可视化,通过MultiPatch类型数据,把3维模型导入到ArcGlobe系统与影像叠加进行3维可视化,并完成道路、树木等建模。也可用于古建筑保护中,并可用于网络发布。
4 结束语
采用3维激光扫描仪获取建筑物点云数据,实践证明,SketchUp 3维建模软件建立的3维模型效果要比系统软件模型效果更好,模型的应用面更广,可以在ARCGIS、Skyline等3维可视化软件下进行可视化,并可用于3维数字校园、古建筑保护等。
[1] CHEN H P,ZHAO B.Space coordinate measurement based on theodolites and rangefinders[J].Laser Technology,2013,37(1):77-81(in Chinese).
[2] LI B J,FANG Zh X,REN J.Extraction of building feature from laser scanning data[J].Geomatics Information Science of Wuhan University,2003,28(1):65-70(in Chinese).
[3] LU X Ch,GONG H L,ZHAO W J,et al.3-D visualization modelling based on laser scanning data[J].Journal of System Simulation,2007,19(7):1625-1629(in Chinese).
[4] YU H X,WU K,AO J F,et al.Extraction of building’s feature lines based on 3-D laser scanning technology[J].Laser Technology,2012,36(4):553-556(in Chinese).
[5] LIU Ch,YANG W.Capturing and modeling spatial features using three dimension laser ranger scanning[C]//The 2005 China Digital City Development Strategy Forum.Xi’an:Xi’an Map Publishing House,2005:315-321(in Chinese).
[6] ZHENG D H.The theory and method of 3-D laser scanning data processing[D].Shanghai:Tongji University,2005:32-35(in Chinese).
[7] TANG F F,RUAN Zh M,LIU X.Research of filtering method for urban airborne LIDAR data[J].Laser Technology,2011,23(4):527-530(in Chinese).
[8] ZHANG H X,ZHU W B.Theory and application of data processing of 3-D laser scanning[M].Beijing:Publishing House of Electronics Industry,2012:89-90(in Chinese).
[9] ZHANG H X,CHEN Y J,LIU G B.Campus building modelling based on 3-D laser scanning[J].Engineering of Surveying and Mapping,2010,19(1):32-34(in Chinese).
[10] XU H W,FANG X L,REN J Y,et al.3-D Modeling technology of digital city based on SketchUp[J].Science of Surveying and Mapping,2011,36(1):213-215(in Chinese).
[11] XU H W,FAN X H,REN J Y,et al.Research on 3-D visualization of digital city based on SketchUp and ArcGIS[J].Bulletin of Surveying and Mapping,2010(3):52-54(in Chinese).
