基于ADAMS的糕点切片机切刀和送料机构的运动仿真
2014-04-16李守成吴海涛刘泓滨
□ 李守成 □ 吴海涛 □ 刘泓滨
昆明理工大学 机电工程学院 昆明 650500
虚拟样机技术是一种新的产品开发技术,运用虚拟样机技术可以大大简化机械产品的设计开发过程,大幅度缩短产品开发周期,减少实验和实验室建设经费,提高产品的系统性能,获得最优化和创新的设计产品[1]。美国MSC开发的机械系统动力学自动分析软件ADAMS (Automatic Dynamic Analysis of Mechanical Systems)是专门用于机械产品虚拟样机开发方面的工具。本文通过基于ADAMS的Adams/View和求解Adams/Solver对糕点切片机切刀往复运动机构和间歇送料机构进行运动学仿真分析,实现了糕点切片机切刀往复运动机构和间歇送料机构的良好配合,验证了模型的合理性和正确性。
1 糕点切片机建模[2、3]
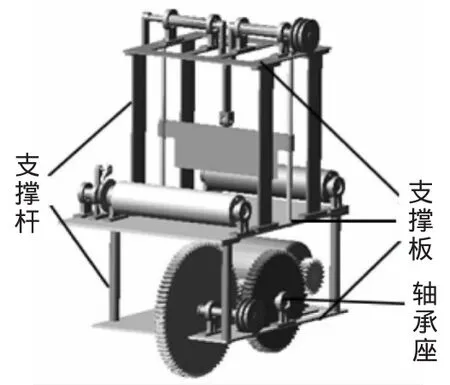
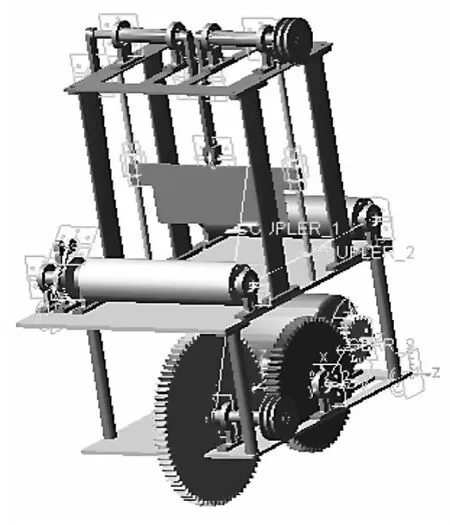
糕点切片机的模型设计主要包括:切刀的往复直线运动、送料机构的间歇运动以及提供动力并保证机构稳定运行的减速电机机构。糕点切片机的三维模型如图1所示。
1.1 切刀往复运动机构设计

▲图1 糕点切片机
为使切刀实现往复直线切割运动,利用曲柄滑块机构和曲柄摇杆机构原理设计了切刀往复运动机构,机构运动简图如图2所示。设计机构尺寸为:曲柄BC(DE)长150 mm(两曲柄等长且平行),切刀连杆 AC长 250 mm,摇杆 GF长 450 mm,连杆FE长500 mm。
1.2 间歇运动送料机构的设计
间歇运动机构采用棘轮-传送带机构,如图3所示。棘轮半径R=44 mm,棘轮周长 L=271.92 mm(L=2πR),则 1°圆心角对应的弧长约为0.76 mm。设计需要的切片厚度为38 mm,根据切片的厚度可计算出棘轮一个周期内的角位移为50°。为使棘轮能够安全工作,在棘轮铰接处安装了涡卷弹簧来保证棘轮与扳手之间有足够的压紧力,为了防止棘轮反转,增加了防止反转的棘轮扳手,保证了机构的可靠性。
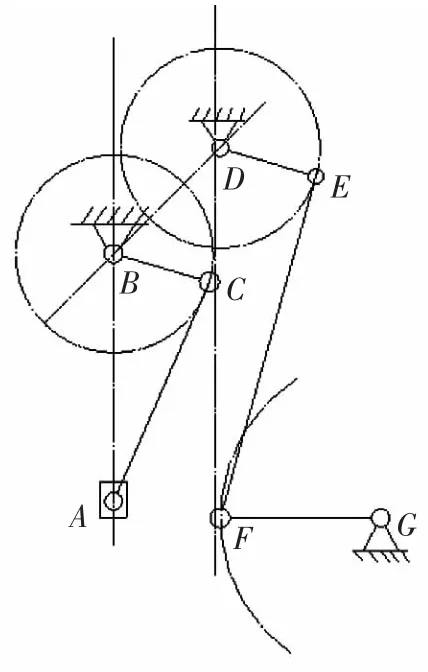
▲图2 切刀机构运动简图
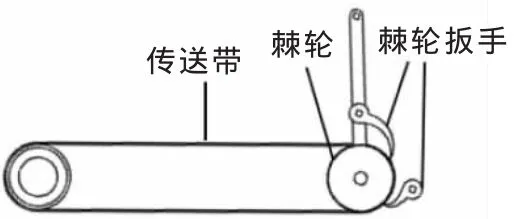
▲图3 棘轮-传送带机构
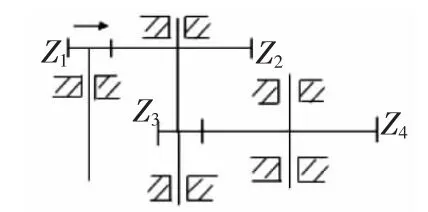
▲图4 二级减速装置轮系图
1.3 减速机构的设计
切片机在工作时,不仅要保证能快速地切片,而且还要保证机构的稳定工作,故设计如图4所示的二级减速装置。电动机的原始角速度选定为1 080 r/min(1 080 r/min=6 480°/s),传动比 i为:

2 ADAMS 运动学仿真[4、5]
2.1 3D模型建立
ADAMS软件主要用于运动学、动力学、静力学仿真以及简单模型的建立,而对于结构较为复杂的3D模型则不宜采用ADAMS建模。故运用有强大灵活建模能力的SolidWorks软件进行建模和虚拟装配,然后通过ADAMS和SolidWorks的接口将糕点切片机的3D模型导入到ADAMS中。
2.2 模型简化
将3D模型导入ADAMS中时需要进行模型简化,否则在ADAMS中需要添加繁琐的约束,极大地增加仿真难度。在导入ADAMS后,为进一步简化模型,减少约束,部分零件在ADAMS中运用布尔运算将其作为一个整体,其中将支撑板、支撑杠、轴承座作为一个整体。在两带轮和两滚轮之间分别添加耦合副可达到仿真的目的,故可将皮带和传送带省略,简化后的模型如图5所示。
▲图5 简化模型图
2.3 添加材料及运动副
按照实际情况进行添加材料,材料为钢。本模型需要运用的运动副有转动副、移动副、齿轮副、耦合副以及固定副,共有14个转动副、2个移动副、2个齿轮副、2个耦合副以及2个固定副。转动副主要添加在有转动的构件间,移动副添加在刀片与导杆间,齿轮副加在减速机构的齿轮与齿轮间,耦合副加在两带轮和两滚轮之间,添加好材料与运动副后的模型如图6所示。
2.4 糕点切片机模型的运动学仿真分析
在ADAMS中,对模型进行简化、添加材料、修改外观以及添加运动副后,对模型进行运动学仿真(end time=5 s,steps=500)并测量刀片、棘轮等构件的相关参数。运动学仿真完成后,进入ADAMS/Postprocessor界面,对仿真测量的结果进行处理及分析。
送料机构-棘轮-传送带要实现间歇运动的要求,对棘轮机构进行相关参数的测量,由于在ADAMS中只能直接测量出棘轮的角速度,故用ADAMS/Postprocessor工具对棘轮的角速度求积分得到棘轮的角位移[6],如图7所示。从图中可看出,棘轮在一个周期内实现的是间歇运动,设计符合实际需求。
糕点切片机切刀机构要实现往复运动,并且还要能实现与间歇运动的送料机构密切配合。当切刀远离送料机构运动时,送料机构应向前移动设定的距离;当切刀运动至最低点将要进行切割时,送料机构应该是停止;切刀的速度要快,这样才不会使切料损坏。图8所示中,切刀进行切割时送料机构处于停止状态,满足设计要求。同时送料机构在一个周期内的角位移为49.8°,理论角位移为50°。图9所示中,切刀的速度在0~600 mm/s内变化,可实现快速切割。
3 结束语
▲图6 添加材料及运动副后的模型图
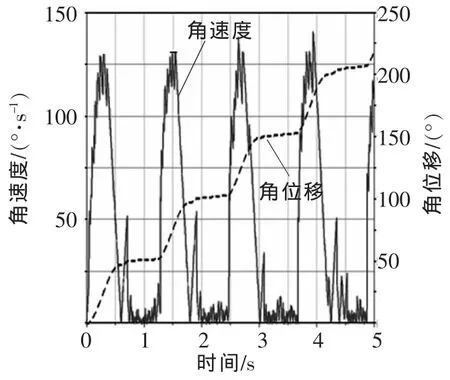
▲图7 棘轮角速度和角位移图
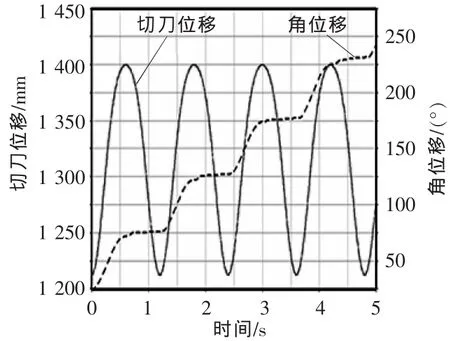
▲图8 切刀位移和棘轮角位移图
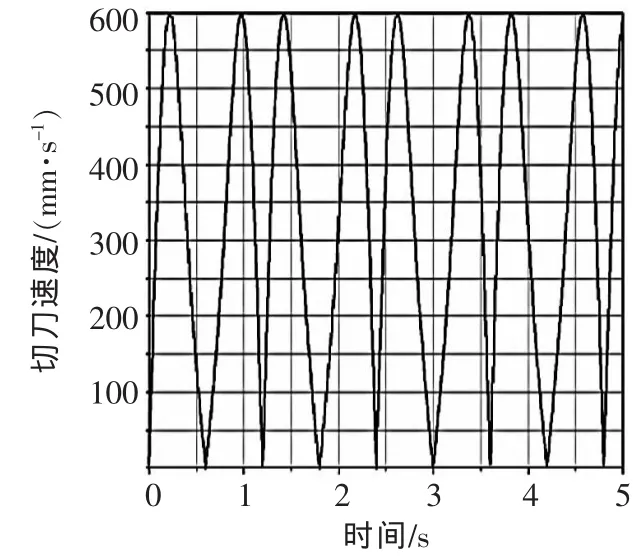
▲图9 切刀速度图
通过ADAMS软件,对在Solid Works软件中按设计要求建立的糕点切片机模型进行运动学仿真研究。根据仿真结果与设计值对比,各项仿真值均接近理论设计值,实现了糕点切片机切刀往复运动机构和间歇送料机构的良好配合,证明该模型是正确的,同时仿真结果可以为模型的进一步优化提供理论依据。
[1] 王国强.虚拟样机技术及其在ADAMS上的实践[M].西安:西安工业大学出版社,2002.
[2] 葛正浩,梁金生,蔡晓霞,等.SolidWorks2008典型机械零件设计实训教程[M].北京:化学工业出版社,2008.
[3] 孙桓,陈作模,葛文杰.机械原理[M].北京:高等教育出版社,2010.
[4] 李增刚.ADAMS入门详解与实例[M].北京:国防工业出版社,2010.
[5] 贾长治,殷军辉,薛文星,等.MD ADAMS虚拟样机从入门到精通[M].北京:机械工业出版社,2010.
[6] (美)MSC.Sortware著,邢俊文,陶永忠译.ADAMS/View高级培训教程[M].北京:清华大学出版社,2005.
