软体机器人研究综述
2014-04-16王志鹏唐海峰
何 斌,王志鹏,唐海峰
(同济大学 电子信息与工程学院,上海201804)
进入21世纪以来,机器人技术广泛用于工业生产、勘探勘测、医疗服务、军事侦察等领域,对于国民经济和国防建设具有重要意义[1].传统机器人多由基于硬质材料(金属、塑料等)的刚性运动副连接构成,能够完成快速、精确、可重复位置或力控制任务.但这种机器人运动灵活性有限,环境适应能力很低,只能在结构化环境下工作.这些缺点限制了刚性机器人在动态、未知、非结构化的复杂环境领域的应用,如军事侦察、灾难救援以及科学探测等.
通过增加自由度,可以大幅度提高机器人运动灵巧性.因此,研究者们在刚性机器人的基础上增加了更多自由度使其具有一定的连续变形能力,形成了超冗余度机器人.这种机器人的环境适应能力较刚性机器人有所提高.但其本体仍然由硬质材料组成,不能任意改变尺寸和大小,在特定环境中应用时需要提供障碍物形状尺寸等先验环境信息.
在自然界中,软体动物广泛分布于海水、淡水及陆地[2].经过亿万年的自然优化,这种动物的软体组织具有变形大、质量轻,功率密度比高的特点,可以使其通过改变身体形状在复杂自然环境条件下高效运动.近年来,研究者以软体动物为原型,提出了软体机器人[3].这种机器人由可承受大应变的软体材料组成,具有无限自由度和分布式连续变形能力.通过模拟生物的形态结构,能够爬行、扭动、蠕动穿过狭小的空间和实现抓取等操作,在非结构化环境中应用前景广泛[4-5].它可以通过不同构型使末端执行器到达三维工作空间的任意一点.与硬质材料构成的超冗余度机器人相比,软体机器人对压力有很小的阻抗,可以通过柔顺变形的方式与障碍物相容[4].这样可以大幅度降低接触力,从而使软体机器人可以搬运柔软或易碎的物品.
软体机器人是一个新的,正在迅速发展的领域.它以材料科学,机构学和控制科学为基础,以利用软体材料的“机械智能”使机器人获得更简单的高效运动为目标.本文介绍了软体机器人的研究现状、仿生机理、驱动方式、建模与控制方法,探讨软体机器人技术研究中的难点和热点,以及可能的发展趋势.
1 研究现状
软体机器人是一种新型连续体仿生机器人.虽然在生物学中软体生物组织结构理论已经相当成熟,但目前对软体机器人的研究仍处于起步阶段,在设计具有类软体生物组织结构的仿生软体机器人基础上进行运动控制和步态规划是研究趋势.现有软体机器人按功能特性可以分为两类:具有爬行、蠕动、游动、跳跃能力的运动型机器人[6-8]和具有抓取、提升物体能力的操作型机器人[9-10].
由欧洲委员会资助的“章鱼触手”项目组通过研究章鱼本体和触手的全局协同运动和控制机理,开发了可以水下工作的仿生章鱼触手,并提出了相应的控制方法[11-12].美国塔夫茨大学的 Huai-Ti Lin等人研制的GoQBot软体机器人具有和毛毛虫一样的滚动弹射能力[13].麻省理工学院、哈佛大学和韩国汉城国立大学的研究人员联合研发的Meshworm机器人,通过在聚合管周围环绕网格状形状记忆合金(Shape memory alloy,SMA)线模拟蚯蚓蠕动并能抵抗强大的冲击[14].采用新型软体材料,利用特殊化学反应驱动的化学软体机器人,近年来成为了研究热点:哈佛大学Wyss生物工程研究院的George M.Whitesides等在DARPA(美国国防部先进研究项目局)支持下开展了多种化学软体机器人工作[15-18];日本早稻田大学的Shingo Maeda等采用凝胶材料研制的仿生尺蠖,利用Belousov-Zhabotinskii(B-Z)化学反应实现了周期性伸缩运动[19].横滨大学的Shutaro Saito等采用光敏离子胶研制了软体微型夹具,可以夹持质量为3mg的重物[20].
国内对软体机器人的研究虽然起步较早,但研究工作的延续性、系统性不强,且主要集中在基于SMA的软体机器人研究.上海交通大学的马建旭等1999年就提出了一种适用于微小软管移动的仿蚯蚓蠕动式微机器人[21],可以在直径20mm的管道中蠕动前进,但受SMA冷却时间的限制,最大运动速度仅为15mm·min-1.2011年中国科学技术大学的杨杰等设计的基于状记忆合金驱动的软体机器人具有滚动、Ω爬行、蠕动三种运动形式,并引入了运动形式切换的思想[22].此外还有浙江大学设计的仿生蚯蚓[23]、哈尔滨工业大学设计的柔性鳍单元[24]、同济大学设计的仿章鱼臂柔性体机器人[25]等.
2 仿生机理
动物的身体结构随中枢神经系统共同进化,形成了完备的一体化神经-机械控制系统[26].其中软体组织对于动物来说至关重要,有利于适应不断变化的复杂环境:动物与环境接触过程中,软体组织与环境接触面大,与环境贴合更紧密;来自环境的反作用力大范围分布于软体组织表面,又能够减小冲击.软体结构也有一定的局限性,其没有刚性骨骼来承载自身重量,通常质量较小.自然界中几乎所有大型无脊椎软体动物均生存在水或地下环境中,依靠环境媒介支撑身体结构.此外,软体结构的大形变、能量吸收特性降低了惯性力的作用效果,也限制了软体动物的移动速度.
研究典型软体动物在复杂环境中如何运动、如何与非结构化环境进行交互,能为机器人在医疗、搜索营救、灾害应急响应等领域的应用提供借鉴.
2.1 蠕虫
蠕虫由表皮、肌肉、体液、神经系统组成.身体呈管状、体积恒定,是典型的流体静力骨骼结构[26-27].这种生物的运动由环肌和纵肌的颉抗形成.如图1所示,纵肌收缩增加直径,环肌收缩减小直径,通过各节段肌肉收缩和扩张产生行进波向前移动,与肠蠕动过程相似.基于流体静力骨骼原理,文献[28]设计了由空气阀、金属弹簧、热塑性轴承组成的压力驱动器.文献[29]采用印制电路板做支撑、嵌入硅树脂和介电弹性体,实现了类蠕虫运动.

图1 蚯蚓身体结构[26]Fig.1 Muscular structure of oligochaeta(earthworm)[26]
2.2 毛虫
毛虫与蠕虫外形相似,却具有完全不同的解剖结构和运动机制[26].其躯干看似分成节段,内部实质连接成一体,也属于流体静力骨骼.毛虫肌肉组织相当复杂,多达2 000个运动单位分布在整个身体中.其肌肉组织包括纵肌、斜肌和躯干其他部位的小型肌肉,但不含环肌,如图2所示.毛虫爬行是通过利用环境对基底的压力控制身体张力的释放实现的,通过调整肌肉张力来增加身体刚度以产生运动越过障碍.此时肌肉周围的环境可以看做机能上的骨骼,称为环境骨骼[30].GoQBot软体机器人[13]具有和毛虫一样的外形和滚动弹射能力.其身体细长10cm,以硅胶和嵌入式SMA驱动线圈制成,能快速变成圆形,释放足够大的弹性能量向前滚动.变形过程只需100ms,达到大约1g的加速度、200r·min-1的转速,推动机器人以200cm·s-1的线速度向前运动.

图2 毛虫身体结构[26]Fig.2 Major muscle group in Manduca[26]
2.3 头足类动物
头足类动物(如章鱼、乌贼)能完成极其复杂的柔性运动,改变身体形状模拟环境.八爪章鱼的每只触手都可以改变长度、任意弯曲[31],虽然身体没有刚性骨骼支撑,却能在一定范围内改变刚度,如图3所示.文献[32]指出,章鱼对触手的控制是分布式的,仅仅通过刻板的运动实现.文献[33]对章鱼身体各部分的运动进行分类和分析后发现,章鱼复杂运动过程中中枢神经系统并不占主导作用,绝大多数指令信息直接由沿触手分布的神经系统下发.这表明,中枢神经系统并不精密控制触手每个部分的运动,身体与环境反馈之间的交互会导致相应的自主运动.

图3 章鱼触手结构[31]Fig.3 Octopus arm anatomy[31]
3 驱动方式
软体机器人具有无限多自由度,但驱动器数目有限,属于欠驱动机器人,因而分布式负载、局部变形都会影响机器人的结构稳定性,进而影响运动或操作的精确度.其自由度与驱动器不是一对一的关系,多个自由度与驱动器之间存在耦合,而且并非所有自由度均可控.驱动机构作用引起的形变由驱动机制、驱动力大小、驱动器大小、形状和位置共同决定.这种驱动、结构一体化的功能特点限制了电机等多种传统驱动器的应用,目前软体机器人的驱动方式主要有如下几种.
3.1 SMA驱动
SMA是一种在加热升温后能完全消除其在较低温度下发生的变形,恢复变形前原始形状的合金材料,具有高质量应力比,被广泛用作柔性驱动器材料.但是SMA丝产生的应力受温度变化影响较大,不同环境下的鲁棒温度控制是一个难点,而且在加热过程中会消耗大部分输入能量,因而效率很低.此外,过热、超限应变等问题会导致SMA驱动器永久损坏.文献[34]中首先在类蠕虫机器人中采用了SMA,之后研究者开始普遍采用其作为驱动器.Meshworm[14]是最新采用SMA的机器人,如图4所示.它不同于蠕虫的定体积机制,是基于定长度设计,某节段的径向SMA收缩引起相邻节段径向SMA扩张,其与地面接触过程中产生蠕动前进所需的推进力.

图4 Meshworm机器人样机[14]Fig.4 Prototype of Meshworm robot[14]
3.2 气动-液压驱动
气动-液压驱动技术成熟,反应速度较快,功率密度高,但一般驱动设备体积大,受辅助系统的限制.气动-液压驱动需要空气、液体流通的管道,Shepherd R F提出在软体机器人本体制作过程将管道嵌入其中,形成驱动-结构一体化,提高驱动效果的同时有效避免渗漏,如图5所示[16].该机器人采用低压空气即可驱动,采用的最高气压为7psi(即50.662 5kPa).

图5 哈佛大学多步态软体机器人[16]Fig.5 Multigait soft robot(Harvard University)[16]
3.3 电活性聚合物驱动
电活性聚合物(electroactive polymer,EAP)是一类能够在外加电场作用下,通过材料内部结构改变而产生伸缩、弯曲、束紧或膨胀等各种形式力学响应的新型智能高分子材料.根据电活性聚合物的致动机理,可以将其分为电子型EAP和离子型EAP两大类[35].电子型EAP通常需要千伏级的驱动电压,所以应用局限性很大.而离子型EAP在较低外加电场作用下即可发生弯曲变形[36],如图6所示.在机器人和生物医学工程领域的应用前景广泛,但是机械强度还有待提高.

图6 离子型EAP[36]Fig.6 Ionic EAP[36]
3.4 化学驱动
化学驱动方式是指利用化学反应将化学能转换成机械能,从而驱动机器人运动.目前代表性的化学反应有能产生巨大瞬时驱动力的燃烧反应和能产生自主周期性驱动力的B-Z化学振荡反应.哈佛大学Robert F.Shepherd等最新研制的三足软体机器人采用软刻蚀工艺制造,利用电火花引发甲烷燃烧产生的爆发力快速驱动机器人“跳跃”[18].机器人0.2s内跃起高度可达自身高度的30倍,最大上升速度约为3.6m·s-1,但其能量转化效率仅为0.7%.早稻田大学的Shingo Maeda等研究了基于B-Z化学振荡反应的凝胶驱动特性,研制出全球首个能自由行走的凝胶体机器人[19,37],如图7所示.凝胶体中的钌离子能够有序地进行放电、充电,从而导致凝胶体产生周期性伸缩变形.

图7 凝胶驱动的化学机器人[19]Fig.7 Chemical robot actuated by gel[19]
4 建模与控制
4.1 软体机器人建模
软体机器人理论上具有无限多自由度,且工作环境复杂多变,建立其精确物理模型难度极大.现有的机器人运动学动力学建模方法多基于刚性连接机制,无法直接应用于软体机器人,其建模方法可以概括为三个阶段:
(1)建立软体机器人本体材料模型,分析其多场耦合特性
目前对软体机器人所采用柔性材料的建模大多局限于力学、电学特性分析等某一特定方面,如介电弹性体极化饱和情况下的能量收集特性[38]、导电硅橡胶的机械特性[39].研究者们已经提出了多种弹性材料大形变情况下的本构模型,如文献[40]综合分析了聚脲弹性体的超弹性和黏弹性,建立了其超弹性Ogden模型、非线性黏弹性模型,文献[41]建立了硅橡胶在高应变速率下的本构模型.
软体机器人通常结构异构、边界条件复杂,其材料多场耦合特性还有待进一步研究.文献[42]对硅橡胶的机电耦合进行了理论分析,文献[43]提出了常规电致伸缩弹性体大形变下的热机电完全耦合连续模型:静电学、有限弹性学、热力学标准平衡方程及其边界条件,和基于现象不变性的特定热-电-弹性本构方程.
(2)建立软体动物的运动模型,分析不同步态特征规律,完成机器人步态规划
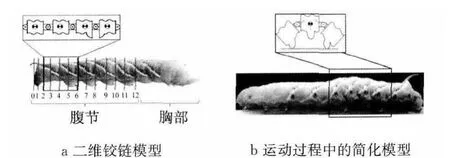
图8 毛虫简化模型[44]Fig.8 Simplified model of caterpillar[44]
文献[44]中建立了毛虫腹足区段的二维可伸缩铰链模型,旋转关节模拟弯曲,铰链轴向变形模拟伸缩,如图8所示.应用该模型求解牛顿-欧拉方程得到每个铰链的驱动力和力矩(逆动力学),可以推算出毛虫爬行过程所受外力和内力,力剖面图证实毛虫体内压力和张力分布是高度局部化的.北京航空航天大学的王巍等提出了由吸附模块和关节模块组成的松毛虫和尺蠖爬壁机器人运动学构型[45].通过步态分析,发现基于全主动关节驱动的松毛虫模型中存在冗余驱动问题.松毛虫模型具有更多的可用步态,因此比尺蠖模型具有更高的安全性.
② 章鱼运动、步态建模
“章鱼项目”组对章鱼臂的运动机理进行了深入分析,建立了多种章鱼臂机器人模型.文献[46]设计了半自动化计算机系统,用于章鱼臂各种运动过程的三维重建,有效解决了恶劣观察条件下柔性体的追踪重建问题,如图9所示.文献[47]分别对章鱼臂伸缩和弯曲过程进行了建模分析.文献[48]测量得到了章鱼臂伸缩的力学特性参数,包括纵向伸长和直径减少比例、平均拉力、收缩速度等.

图9 章鱼臂运动三维重建[46]Fig.9 Snapshot of the process used to reconstruct the direction of the suckers[46]
章鱼臂曲率非常量,传统分析多将其曲率分段近似为常量,缺乏准确性.文献[49]采用不同于分段近似的方法,利用连续体几何精确法建立了仿章鱼臂机械手的运动学模型,利用雅克比方法建立了其逆运动学模型.文献[50]建立了肌腱驱动的仿章鱼臂连续体机械手的精确三维稳态模型,同时推导了描述机械手变形的常微分方程.该模型对肌腱驱动进行了建模,具有通用性,可以作为一类线驱型连续型软体机械手的设计及仿真工具.目前已有很多文献分析了单章鱼臂运动学、动力学模型,但综合分析章鱼臂协同运动的少有报道.文献[31]在分析单章鱼臂模型的基础上进行扩展,建立了含8只臂的多连续体模型,并对爬行、游动等多臂协同运动进行了仿真分析.
(3)综合分析,建立软体机器人与环境耦合作用模型
软体机器人实际工作于非结构化环境,受到来自于环境对象的反作用力,需要针对具体典型环境,建立机器人-环境耦合作用模型,为后续控制策略的设计提供参考,如文献[31]中采用弹簧阻尼系统来描述章鱼臂吸盘与物体之间的相互作用,如图10所示.

图10 吸盘-物体相互作用原理图[31]Fig.10 Schematic of sucker-object interaction[31]
4.2 软体机器人控制方法
传统的机器人控制系统框架基于对每个自由度的独立反馈控制,而软体机器人理论上有无限多自由度,整体结构会产生弹性形变,外界环境通过分布式负载或直接接触与其相互作用.难以精确测量软体机器人形状和末端位置,因而还没有适用于软体机器人的通用控制理论.目前主流的软体机器人中,仿章鱼臂软体机器人分布式分级控制理论发展相对成熟,已有一系列突出成果.
研究发现,八爪章鱼完成各种复杂运动的过程中,中枢神经系统(central nervous system,CNS)的控制并不占主导作用,分布于各个臂的外围神经系统(peripheral nervous system,PNS)控制才是复杂运动的关键.部分运动完全不需要CNS的刺激作用,可在PNS的单独控制下实现.Rolf Pfeifer等基于上述结果提出了“通过与环境交互来增强性能”的机器人设计准则,以及Embodied Intelligence(EI)理论[51-52].因此,实现智能控制不仅仅依赖于中枢控制系统,同时也与系统的其他部分息息相关,复杂运动是机器人整体与环境交互作用的结果.软体机器人控制系统复杂度不一定与机器人运动和操作复杂度成正比,相反,其控制系统、控制策略可能相对简单.文献[53-54]对章鱼爬行过程中的感知运动控制策略总结如下:视觉系统将采集的视频信息(覆盖360°周围环境)进行预处理后发送至CNS;CNS确定爬行方向并选择活动臂,将触发信号和初值发送至PNS;PNS收到控制命令选择性控制各臂对应肌肉群的具体运动[54].文献[55-56]在分级控制基础上,将更低层次的反射控制加入到控制系统框架中,设计的分级、分布式、开环控制系统计算复杂度低、易实现,如图11所示.文献[31]将其控制算法应用于章鱼臂多连续体模型,仿真分析结果表明了该算法的有效性.上述控制系统均属于开环控制,控制精度欠缺,未来的工作是引入机器人本体内部和外界环境反馈组成闭环控制系统,实现软体机器人的精确控制.

图11 开环控制系统框图(单臂)[55]Fig.11 Open-loop control block diagram for a single arm[55]
其他形式的软体机器人所采用的控制策略取决于所采用的材料、结构和驱动方式,通常基于简化的软体机器人模型,在实时高精度控制和计算代价之间权衡.如典型的多步态软体四足机器人,基于Pneu-Net(PN)架构[15],四足和躯干中心各包含一个气动网络装置,如图12所示.该机器人采用具有不同伸展性的双层材料层叠而成,驱动层采用Ecoflex材料,可延展性高;应变限制层采用Polydimethylsiloxane(PDMS)材料,可伸展性差.外部加压时,由于延展性不同,驱动层产生的形变远大于应变限制层,宏观上导致材料向应变限制层一侧弯曲运动.各个气动网络装置相互独立,驱动层与应变限制层中间有间隔分布的连通空腔,通过调整空腔的方向、大小、数量来调整气动网络装置的运动.按照经验设定运动步态,按一定时序控制5个气动网络装置的加压时间、压力大小,即可控制整个机器人的运动.

图12 气动网络装置形态[15]Fig.12 Morphology of PN[15]
为适应不同任务需要,动态环境中软体机器人在特定形态下的刚度控制也是一大难点.上述气动软体机器人通过控制每个气动网络装置的压力可使各足具有一定的刚度.文献[49]中的仿章鱼臂能通过选择并驱动合适的对抗性肌腱来调整弯曲刚度.
5 总结展望
近年来对软体动物特别是蠕虫、毛虫、章鱼臂的研究极大促进了软体机器人技术的发展,包括新型机器人结构、驱动技术、建模方法、控制算法等.但是作为一种全新的机器人,软体机器人的研究才刚刚起步.这种机器人的研究涉及到材料、化学、机械、控制等多学科,从材料选择、结构设计、到控制与感知均存在许多问题需要深入研究.
首先,实现具有类似软体动物生物力学智能特性的机器人,需要研制新型活性软质材料.制造在不同方向、不同范围压力作用下具有不同机械特性的材料,将会为软体机器人的非线性运动带来突破.
其次,缺少一套成熟的软体机器人设计方法.软体通常结构异构,工作环境复杂多变,且其材料具有多场耦合特性.因此,需要在柔性材料的机构结构学、运动学、动力学、化学动力学等的同步分析的基础上建立统一模型.从而为解决多场耦合强非线性条件下机器人结构拓扑、运动学、动力学参数的求解与优选提供理论基础.
最后,由于软体机器人具有无限自由度,而现实中致动器个数是有限的,要实现精确实时控制是一个十分具有挑战性的工作.因此,研究软体机器人的仿生智能控制算法非常有意义.这需要研究用有限维模型描述软体机构无穷维分布参数模型的等效方法,综合考虑模型复杂性与系统控制性能,建立基于优化方法的等效控制模型.研究分布式神经系统控制与经典控制方法结合的算法,实现对机器人形态与位姿进行精确控制.建立柔性机构的性能控制及监测方法.
[1] 谭民,王硕.机器人技术研究进展[J].自动化学报,2013,39(7):963.TAN Min,WANG Shuo.Research progress on robotics[J].ActaAutomaticaSinica,2013,39(7):963.
[2] Majidi C,Shepherd R F,Kramer R K,etal.Influence of surface traction on soft robot undulation[J].The International Journal of Robotics Research,2013,32(13):1577.
[3] Trivedi D,Rahn C D,Kier W M,etal.Soft robotics:biological inspiration,state of the art,and future research[J].Applied Bionics and Biomechanics,2008,5(3):99.
[4] 曹玉君,尚建忠,梁科山,等.软体机器人研究现状综述[J].机械工程学报,2012,48(3):25.CAO Yujun,SHANG Jianzhong,LIANG Keshan,etal.Review of soft-bodied robots[J].Journal of Mechanical Engineering,2012,48(3):25.
[5] Calisti M,Giorelli M,Levy G,etal.An octopus-bioinspired solution to movement and manipulation for soft robots[J].Bioinspiration &Biomimetics,2011,6(3):036002.
[6] Sugiyama Y,Hirai S.Crawling and jumping by a deformable robot[J].The International Journal of Robotics Research,2006,25(5/6):603.
[7] Suzumori K,Endo S,Kanda T,etal.A bending pneumatic rubber actuator realizing soft-bodied manta swimming robot[C]//Proceedings of IEEE International Conference on Robotics and Automation.Roma:IEEE,2007:4975-4980.
[8] Seok S,Onal C D,Wood R,etal.Peristaltic locomotion with antagonistic actuators in soft robotics[C]//Proceedings of IEEE International Conference on Robotics and Automation.Anchorage:IEEE,2010:1228-1233.
[9] Jones B A,Walker I D.Kinematics for multisection continuum robots[J].IEEE Transactions on Robotics,2006,22(1):43.
[10] Calisti M,Arienti A,Giannaccini M E,etal.Study and fabrication of bioinspired octopus arm mockups tested on a multipurpose platform [C]//Proceedings of IEEE RAS and EMBS International Conference on Biomedical Robotics and Biomechatronics.Tokyo:IEEE,2010:461-466.
[11] Laschi C,Cianchetti M,Mazzolai B,etal.Soft robot arm inspired by the octopus[J].Advanced Robotics,2012,26(7):709.
[12] Zheng T,Branson D T, Guglielmino E,etal.Model validation of an octopus inspired continuum robotic arm for use in underwater environments[J].Journal of Mechanisms and Robotics,2013,5(2):021004.
[13] Lin H T,Leisk G G,Trimmer B.GoQBot:a caterpillarinspired soft-bodied rolling robot [J].Bioinspiration &Biomimetics,2011,6(2):026007.
[14] Seok S,Onal C D,Cho K,etal.Meshworm:aperistaltic soft robot with antagonistic nickel titanium coil actuators[J].IEEE/ASME Transactions on Mechatronics,2012,18(5):1485.
[15] Ilievski F,Mazzeo A D,Shepherd R F,etal.Soft robotics for chemists[J].Angewandte Chemie,2011,123(8):1930.
[16] Shepherd R F,Ilievski F,Choi W,etal.Multigait soft robot[J].Proceedings of the National Academy of Sciences,2011,108(51):20400.
[17] Morin S A,Shepherd R F,Kwok S W,etal.Camouflage and display for soft machines[J].Science,2012,337(6096):828.
[18] Shepherd R F,Stokes A A,Freake J,etal.Using explosions to power a soft robot[J].Angewandte Chemie,2013,125(10):2964.
[19] Nakamaru S,Maeda S,Hara Y,etal.Development of novel self-oscillating gel actuator for achievement of chemical robot[C]//Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems.St.Louis:IEEE,2009:4319-4324.
[20] Saito S,Katoh Y,Kokubo H,etal.Development of a soft actuator using aphotocurable ionic gel[J].Journal of Micromechanics and Microengineering,2009,19(3):035005.
[21] 马建旭,李明东,包志军,等.仿蚯蚓蠕动微机器人及控制系统[J].上海交通大学学报,1999,33(7):855.MA Jianxu,LI Mingdong, BAO Zhijun,etal.Micro peristaltic robot simulating earthworm and its control system[J].Journal of Shanghai Jiaotong University,1999,33(7):855.
[22] Du Y,Xu M,Dong E,etal.A novel soft robot with three locomotion modes[C]//Proceedings of IEEE International Conference on Robotics and Biomimetics.Phuket:IEEE,2011:98-103.
[23] 刘伟庭,方向生,陈裕泉,等.仿生"蚯蚓"机器人的SMA执行器实现[J].传感技术学报,2005,18(3):623.LIU Weiting,FANG Xiangsheng,CHEN Yuquan,etal.Realizing of SMA actuators for biomimetic earthworm[J].Chinese Journal of Sensors and Actuators,2005,18(3):623.
[24] 王振龙,杭观荣,李健,等.面向水下无声推进的形状记忆合金丝驱动柔性鳍单元[J].机械工程学报,2009,45(2):126.WANG Zhenlong,HANG Guanrong,LI Jian,etal.Shape memory alloy wire actuated flexible biomimetic fin for quiet underwater propulsion[J].Journal of Mechanical Engineering,2009,45(2):126.
[25] He B,Wang Z,Li Q,etal.An analytic method for the kinematics and dynamics of a multiple-backbone continuum robot[J].International Journal of Advanced Robotic Systems,2013,10(84):1.
[26] Kim S,Laschi C,Trimmer B.Soft robotics:a bioinspired evolution in robotics[J].Trends in Biotechnology,2013,31(5):287.
[27] 颜兵兵,任福君.拱泥机器人仿生机构方案设计[J].机械科学与技术,2009,28(5):674.YAN Bingbing,REN Fujun.Design of the bionic mechanism of a move-in-mud robot [J].Mechanical Science and Technology for Aerospace Engineering,2009,28(5):674.
[28] Mangan E V,Kingsley D A,Quinn R D,etal.Development of a peristaltic endoscope [C ]//Proceedings of IEEE International Conference on Robotics and Automation.Washington D C:IEEE,2002:347-352.
[29] Jung K,Koo J C,Lee Y K,etal.Artificial annelid robot driven by soft actuators[J].Bioinspiration &Biomimetics,2007,2(2):42.
[30] Lin H T,Trimmer B A.The substrate as a skeleton:ground reaction forces from a soft-bodied legged animal[J].The Journal of Experimental Biology,2010,213(7):1133.
[31] Kang R,Branson D T,Guglielmino E,etal.Dynamic modeling and control of an octopus inspired multiple continuum arm robot[J].Computers and Mathematics with Applications,2012,64(5):1004.
[32] Sumbre G,Fiorito G,Flash T,etal.Neurobiology:motor control of flexible octopus arms[J].Nature,2005,433(7026):595.
[33] Gutfreund Y,Flash T,Fiorito G,etal.Patterns of arm muscle activation involved in octopus reaching movements[J].The Journal of Neuroscience,1998,18(15):5976.
[34] Menciassi A,Gorini S,Pernorio G,etal.A SMA actuated artificial earthworm[C]//Proceedings of IEEE International Conference on Robotics and Automation.New Orleans:IEEE,2004:3282-3287.
[35] Pelrine R,Kornbluh R,Pei Q,etal.High-speed electrically actuated elastomers with strain greater than 100%[J].Science,2000,287(5454):836.
[36] Shahinpoor M,Kim K J.Ionic polymer-metal composites:I.fundamentals[J].Smart Materials and Structures,2001,10(4):819.
[37] Nakagawa H,Hara Y,Maeda S,etal.A novel design of nanofibrous gel actuator by electrospinning[C]//Proceedings of IEEE Conference on Nanotechnology.Seoul:IEEE,2010:1135-1138.
[38] Liu L,Luo X,Liu Y,etal.Dielectric elastomer energy harvesting undergoing polarization saturation[C]//Proceedings of Electroactive Polymer Actuators and Devices.San Diego:SPIE,2012:83401V.
[39] Petkovic′D,Issa M,Pavlovic′N D,etal.Adaptive neuro-fuzzy estimation of conductive silicone rubber mechanical properties[J].Expert Systems with Applications,2012,39(10):9477.
[40] Li C,Lua J.A hyper-viscoelastic constitutive model for polyuria[J].Materials Letters,2009,63(11):877.
[41] Lin Y,Lu F,Lu L.Constitutive behaviors of a silicone rubber at high strain rates[J].Chinese Journal of High Pressure Physics,2007,21(3):289.
[42] Liu L,Sun S,Zhang Z,etal.The constitutive relation of silicone rubber soft active materials[C]//Proceedings of Electroactive Polymer Actuators and Devices.San Diego:SPIE,2010:76421I.
[43] Vertechy R,Berselli G,Castelli V P,etal.Continuum thermo-electro-mechanical model for electrostrictive elastomers[J].Journal of Intelligent Material Systems and Structures,2013,24(6):761.
[44] Saunders F,Trimmer B A,Rife J.Modeling locomotion of a soft-bodied arthropod using inverse dynamics[J].Bioinspiration&Biomimetics,2011,6(1):016001.
[45] 王巍,王坤,李大寨,等.爬壁蠕虫机器人构型初探[J].北京航空航天大学学报,2009,35(2):251.WANG Wei,WANG Kun,LI Dazhai,etal.Basic research on configuration of climbing worm robot[J].Journal of Beijing University of Aeronautics and Astronautics,2009,35(2):251.
[46] Yekutieli Y, Mitelman R, Hochner B,etal.Analyzing octopus movements using three-dimensional reconstruction[J].Journal of Neurophysiology,2007,98(3):1775.
[47] Cianchetti M,Arienti A,Follador M,etal.Design concept and validation of a robotic arm inspired by the octopus[J].Materials Science and Engineering:C,2011,31(6):1230.
[48] Margheri L,Laschi C,Mazzolai B.Soft robotic arm inspired by the octopus:I.from biological functions to artificial requirements[J].Bioinspiration &Biomimetics,2012,7(2):025004.
[49] Giorelli M,Renda F,Calisti M,etal.A two dimensional inverse kinetics model of a cable driven manipulator inspired by the octopus arm [C]//Proceedings of IEEE International Conference on Robotics and Automation.Saint Paul:IEEE,2012:3819-3824.
[50] Renda F,Cianchetti M,Giorelli M,etal.A3D steady-state model of a tendon-driven continuum soft manipulator inspired by the octopus arm[J].Bioinspiration &Biomimetics,2012,7(2):025006.
[51] Pfeifer R,Iida F,Bongard J.New robotics:Design principles for intelligent systems[J].Artificial Life,2005,11(1/2):99.
[52] Pfeifer R, Lungarella M, Iida F.Self-organization,embodiment,and biologically inspired robotics[J].Science,2007,318(5853):1088.
[53] Li T, Nakajima K, Calisti M,etal.Octopus-inspired sensorimotor control of a multi-arm soft robot[C]//Proceedings of IEEE International Conference on Mechatronics and Automation.Chengdu:IEEE,2012:948-955.
[54] Kuwabara J,Nakajima K,Kang R,etal.Timing-based control via echo state network for soft robotic arm[C]//Proceedings of the 2012 International Joint Conference on Neural Networks.Brisbane:IEEE,2012:1-8.
[55] Guglielmino E,Zullo L,Cianchetti M,etal.The application of embodiment theory to the design and control of an octopuslike robotic arm [C]//Proceedings of IEEE International Conference on Robotics and Automation.Saint Paul:IEEE,2012:5277-5282.
[56] Branson D T,Kang R, Guglielmono E,etal.Control architecture for robots with continuum arms inspired by octopus vulgaris neurophysiology [C ]//Proceedings of IEEE International Conference on Robotics and Automation.Saint Paul:IEEE,2012:5283-5288.
