数字化软开关电源的Matlab仿真研究
2014-04-16吴思燕
吴思燕
(国网湖北省电力公司 咸丰县供电公司,湖北 咸丰 445600)
0 引言
现代电源不断寻求小型化、轻量化,这就要求DC/DC变换器向高频化的方向发展,需要解决开关损耗和开关噪音的问题。零电压零电流开关(ZVZCS)移相全桥变换器实现了开关管的零电压零电流导通过程,降低了开关损耗和噪声,提高变换器的效率[1]。随着微处理器计算速度和性能的提升,以及数字信号处理技术日趋成熟,DSP芯片在开关电源领域的应用更加广泛,显示出越来越多的优点。同时高频开关数字控制的研究,特别是开关电源的小型化、模块化以及数字化,将不断扩展数字信号处理技术的应用研究。
1 移相全桥软开关变换器原理分析
1.1 基于DSP控制的移相全桥变换器的主拓扑结构和工作过程
在一般的全桥式DC/DC变换器中,VT1和VT4的控制信号是同相位的,VT2和VT3的控制信号是同相位的,在如图1所示的移相全桥ZVZCVS变换器[2]中,VT1、VT2分别超前VT4、VT3一个相位角,所以VT1、VT2构成的桥臂称超前桥臂,VT4、VT3构成的桥臂称滞后桥臂。可以通过调节超前桥臂和滞后桥臂控制信号的相位关系[3],从而可以调节输出电压的大小。
移相全桥ZVZCS变换器的主电路结构如图1所示。D1—D4为快恢复二极管,C1,C2为开关观VT1,VT2的结电容。Cb为隔离电容(也称阻断电容),Lr为饱和电抗器。
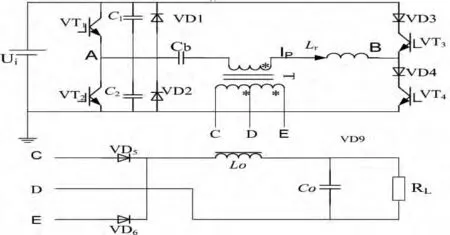
图1 变换器主电路
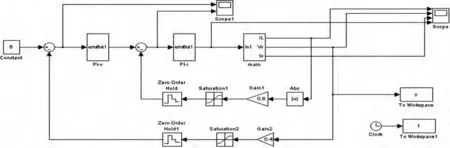
图2 数字DSP控制的移相全桥变换器系统仿真模型
在每个工作半周期间,移相全桥ZVZCS变换器有六种开关模态,六种开关模态的原理不在这里赘述。每个桥臂的开关(超前桥臂VT1、VT2和滞后桥臂VT3、VT4)具有接近50%的占空比交错通断,两个桥臂之间的相移决定变换器的工作占空比(相对占空比)。
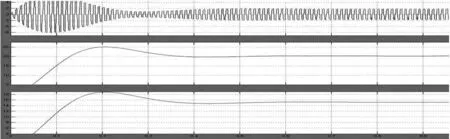
图3 开环仿真图

图4 输入310V,定负载下输出电压,电流波形以及移相角变化(弧度制)
1.2 移相角生成策略
DSP实现:在ZVZCS全桥变换器的移相控制策略中,需要四对独立的驱动信号,并满足上下桥壁两管的驱动波形180°互补,四路驱动波形占空比大小固定,对角超前臂功率管的驱动信号领先滞后桥臂功率信号一个移相角α,移相角大小范围0—180°[3],在系统闭环调节过程中实现动态调节。VT1—VT4管的驱动可以利用PWM1—PWM4四个通道,即配置PWM1,PWM2为互补通道对,驱动超前臂,配置PWM3,PWM4为互补通道对,驱动滞后臂。采用半周期重载中断,保证输出占比大小不变同时移相,设前半周期比较寄存器CMPR设定值为V1,后半周期比较寄存器CMPR设定值改为V2,保持(V1+V2)/2为常数即可。改变V1的值就可改变PWM波的相位,即相对占空比发生变化,动态调节输出电压[3-4]的大小。
Matlab实现:通过比较延时环节作用下在输入ln1改变的情况下动态实现 0—180°(pi)移相。
1.3 数字DSP控制的移相全桥变换器系统(DSP实现)
解决了移相生成角后,再根据反馈的输出电压、原边电感电流的采样值动态调节电压外环和电流内环的输出,实现稳压,以实现DSP的功能,即DSP控制移相全桥变换器。PI调节器是人们长期在实践中摸索出来的一种结构简单实用性极强的校正装置,在此控制系统中电压、电流环应用了PI环节,PI参数的设计[5]通过查看相关资料经仿真调试得到。
1.4 移相全桥变换器系统Matlab仿真实现
采用Matlab软件对数字DSP控制移相全桥变换器系统进行仿真,得到图2,模型中包含的子系统与函数说明及参数如下,Ur为电压基准,PI-v为 PI模块电压环,PI-i为PI模块电流环,Main为开环模型,包括PWM发生器,全桥主电路和移相角生成电路,比例放大系数,Ki=0.8,Kv=0.4以及采样频率Sample为50K。其中限幅环节模拟DSP的保护作用,零阶保持环节模拟DSP的采样,PI调节器在DSP内通过相应的算法实现。
其中子系统main是该系统的开环模型,系统的输入变量是piln1,这里ln1为移相角(弧度制),设定内部参数。在仿真时运用做一个离散的PI环节封装成PI调节器,与DSP的离散算法相一致,为其设定仿真参数。
按照设计要求,输出额定功率为300W(15V/20A),仿真结果如下。
(1)额定负载下(0.75ohm),开环原边电流,输出电流,电压波形。
(2)闭环稳态仿真结果。
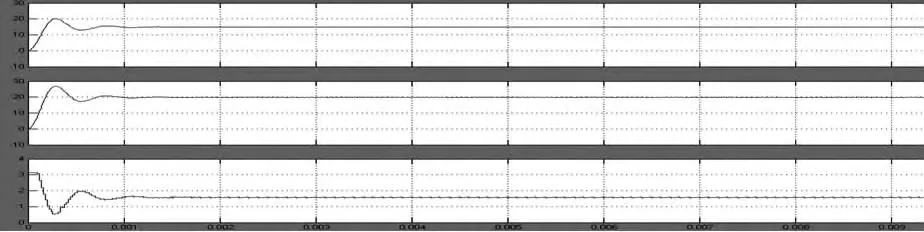
图5 输入350 V,定负载下输出电压,电流波形以及移相角变化(弧度制)
从图3和4知无论是动态性还是稳定性开环输出效果没有闭环输出好,图4和5可以看出输入增大可以减小移相角从而达到改变相对占空比进而达到动态稳定调压的目的。0.005s时突加载,仿真时输出电压/电流波形以及移相角有动态变化,但状态稳定。Matlab仿真结果表明,该系统能够达到较好的稳态和动态性能。
2 结论
本文设计了基于DSP控制的移相全桥软开关变换器,结合理论分析并在仿真软件Matlab环境下,搭建了仿真模型。通过仿真验证了理论分析的正确性,实现了模拟DSP控制的移相控制策略,得到了合理PI参数值。通过仿真分析,为硬件电路的搭建提供了理论依据。
[1]阮新波,严仰光.脉宽调制DC/DC全桥变换器的软开关技术[M].科学出版社,2006.
[2]王兆安,黄俊.电力电子技术[M].4 版.机械工业出版社,2005,1.
[3]洪峰.数字控制移相全桥软开关变换器[D].南京航空航天大学,2004.2.
[4]芮骐骅.滞后臂串联二极管的ZVZCS移相全桥变换器研究[D].合肥工业大学,2010-4-1.
[5]杜少武.现代电源技术[D].合肥工业大学电气与自动化学院,2006.
