一种有效提高实时数据处理融合效果的算法探究
2014-04-14李莉
李 莉
(辽宁葫芦岛92941-96,125000)
0 引言
实时数据处理是武器装备试验过程中一项重要的技术工作,针对不同试验要求,需要处理的实时数据量是非常庞大的。在实际工作中,庞大的实时测量数据往往因为传输时延和不同的数据特征必须进行数据融合处理。并且数据融合处理的效果将直接关系到实时数据分析估计误差的评估结果。因此,研究一种有效提高实时数据处理融合效果的算法已经是武器装备试验实时数据处理工作的迫切需求。本文研究的内容主要是某型导弹试验实时数据处理为例,探讨一种采取修正加权因子动态调整实时数据融合效果的算法,并通过仿真评估融合实际效果。
1 自适应加权数据融合算法
在某型导弹试验任务重,需要处理来自21 个测控站点n 套测控装备的实时数据,因此我们可以假设需要处理的实时测控数据Z,n 套测控装备实时数据融合结果,则n 套测控装备采集的数据,如果各测量数据间是相互独立的,我们就可以得到实时数据无偏估计Z,通过上述信息计算能够得到装备的测控数据方差,这里面涉及到的实时数据数据融合加权因子:,并符合以下条件:


对上式进行均方误差处理,结果为:


上式取最小均方误差,获得:

假设i 套测控装备在每一个测量时间节点获得的实时数据是:,就可以得出第k 时刻的实时数据均值:

计算均方差:


(K+1)时刻均方差值:



2 仿真实验
为更好的书名上述方法的评估效果,我们通过如下仿真试验来验证算法的可用性。
在某水雷试验过程中,针对实时数据应用公式(9),项计算获得n 个测量设备实时测量数据的均方差,通过动态调整加权因子,经仿真计算可以得到如下目标状态融合评估均方误差估计效果比较结果:
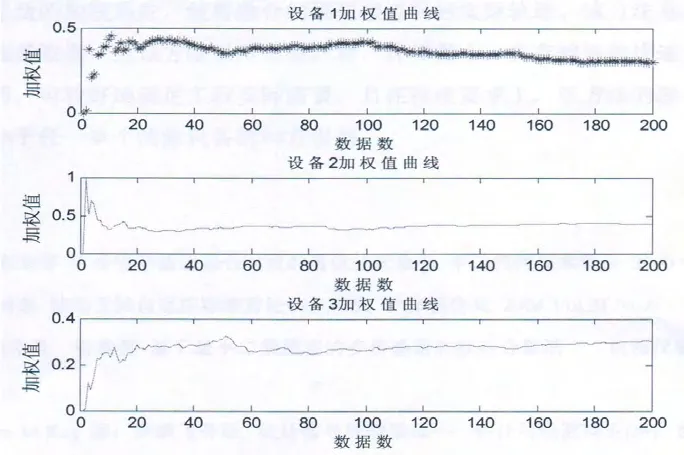
图1 动态调整加权值
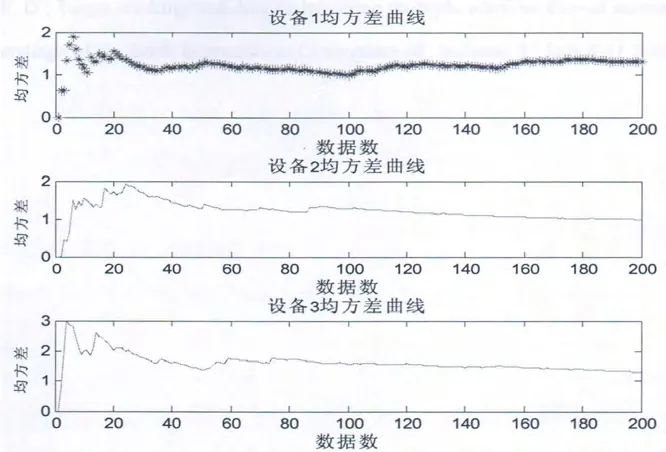
图2 均方差仿真计算结果
通过上述效果比较:我们可以知道,通过对各测控装备实时测量数据均方差的实施计算,能够对目标跟踪状态进行有效控制,如果某台测控设备出现异常实时测量数据的情况,目标状态融合计算的加权值也动态进行修正,能够实现各种试验条件当下目标状态的有效跟踪和科学评估。
3 结论
通过本文的研究和实际仿真效果比较,通过对实时数据测量方差的动态跟踪计算,和实施动态修正加权因子,能够最大限度的获得试验目标跟踪和状态评估实际效果。同时研究过程中,采取了递推算法和n 套测控装备实时测量数据的有效利用,在武器装备试验实时数据处理融合算法应用中具有较好的效果和快速的反应时间,在试验目标跟踪精度和状态评估精度上保持非常好的效果。
[1] A.Houles, Y.Bar-Shalom Multisensor Tracking of a Maneuvering Target in Clutter IEEE Transactions on Aerospace and Electronic Systems Vol.Aes-25 NO.2 March 1989 P176-189
[2] 修建娟 何友 王国宏 主、被动雷达数据融合算法研究 系统工程与电子技术 2001 Vol.23 No.8 P42-45
[3] 翟翌立 戴逸松 多传感器数据自适应加权融合估计算法的研究 计量学报 1998 Vol.19 No.1 P69-75
[4] 仲崇权.张立勇 杨素英 基于最小二乘原理的多传感器加权融合算法.仪器仪表学报 2003 No.8
[5] 仲崇权 董西路 张立勇 曹阳 数据采集与处理 2003 Vol.18 No.4 P412-417
[6] 杨位钦 顾岚 时间序列分析与动态数据建模[M].北京: 北京理工大学出版社, 1988.
[7] 胡士强 多传感器协同数据融合理论及应用.上海交通大学 博士后研究工作报告 2004 08
