雷达监控系统中GPS数据采集技术的研究
2014-04-14段晓超
段 登 段晓超 华 非
(1.中国电子科技集团公司第三十八研究所 合肥 230088;2.安徽博微长安电子有限公司 安徽六安 237010)
0 引言
GPS(Global Positioning System,全球定位系统)是美国于1993年8月全面建成并运行的新一代卫星导航、定位和授时系统。该技术具有全天候、高精度和高效益等特点,并且在在各领域已经得到了广泛应用。GPS 由导航卫星、地面监测站和用户接收机三大部分组成。如今,我国研制的常用常规雷达系统在开始工作前均有一个整机上电初始化的过程,精确的时间信息和地理位置的获取是初始化工作的一项重要内容。研究中选用Hemisphere 公司推出的一款HC12-OEM 模块作为用户接收机部分来完成时间和位置信息的获取,经验证该模块可以满足雷达整机运行的一般需求[1]。
在对于多个基地雷达系统同时协同作战时,时间同步问题至关重要的。而GPS-OEM 模块通过卫星授时可以为整机提供了一个精确的协调世界时(UTC,Universal Time Coordinated)时间信息及位置信息。因此,利用HC12-OEM 模块来获取GPS 标准时间信息能很好地解决雷达整机存在的时间同步问题。
文中重点介绍了Hemisphere 公司GPS 时钟接收模块使用及如何利用嵌入式硬件FPGA(现场可编程门阵列)来实现GPS 位置信息与精确时间的采集,为以后雷达监控系统的GPS 数据采集技术提供一定的工程借鉴意义[2]。
1 硬件设计
1.1 总体架构
雷达监控系统中GPS 数据的采集系统主要包含以下三部分,即HC12-OEM 接收模块、FPGA 采集模块和雷达上位机系统,具体框图1所示。
图1 中主要工作流程包括:首先,对采集到的标准NMEA-0183 数据的进行预处理(数据锁存,以特定波特率接收协议),然后将解析完成的协议信息(包括字头、经纬度信息、UTC 数据等信息成帧放在异步FIFO 中),最后等待CPCI计算机发出读信号将协议数据接收,并利用界面程序进行实时显示及更新[3-4]。

图1 雷达监控系统GPS 数据采集框图
1.2 采集系统硬件设计
HC12-OEM 接收模块
该模块是一款单频12 通道接收机,采用了Hemisphere 公司最新的ASIC 芯片和Coast 等专利软件算法,同时具有20Hz 的高数据更新率,信标接收功能,L-Dif,E-Dif,1pps/Event Marker 等多种功能,相应时间快,抗干扰能力强、性价比高,是当前GPS 行业的最新技术趋势。
嵌入式CPCI计算机CP6001
设计中的CPCI计算机是由Eching-控创公司开发的一款全新的6U Value 系列的CompactPCICPU 板,该模块配备了1.86G 处理器,并且具有工业化组件和4 个千兆以太网接口,含有2 个USB 端口,Flash 端口,USB 端口及PCI接口等常用接口,专门应用于要求严格,功能复杂的工业自动化和IP 交换应用领域。
GPS 数据的采集系统具体实现设计框图如图2所示。
在具体的GPS 数据采集过程中共有以下几个步骤:
HC12-OEM 接收模块上电后会按照预期设置好的模式向数据接口板定时发送协议数据和PPS(秒脉冲)。
数据接口板首选采用异步串口RS422 接口芯片(SN74ALVC164245)进行数据的差分信号传输,具有较好的抗干扰能力。将HC12OEM 接收板送出来电压幅度为5V 的协议信号及PPS 秒脉冲转换成FPGA(EP2C35F672I8)模块IO 口所支持的3.3V 电压信号;而后进行协议数据的预处理判断,并将有效信息存入FPGA 芯片内置FIFO 中。
CPCI计算机通过给总线发送控制信号来读写FPGA 中的内置FIFO,进而进行数据解析及显示。其中PCI9030 是连接CPCI总线和FPGA 芯片的桥梁,将数据地址总线复用的CPCI总线分离成数据地址总线独立,以便对FPGA 端口的进行相应的读写。

图2 实现设计系统框图
2 主要技术研究
2.1 HC12 -OEM 应用
对于HC12-OEM 的应用需要分以下三步来完成。
首先,必须掌握系统的通信协议。GPS-OEM板采用NMEA-0183 通信标准格式,可以输出多种句型,均以“”开头。输出的语句按串口通信协议,波特率9600b/s,1 位开始位、8 位数据位、1位停止位、无奇偶校验。输出数据采用的是ASCII码字符,内容包含了纬度、经度、速度、日期、航向及卫星状况等信息。语句达十余种,本系统所使用的语句仅限于GPGLL 定位数据语句。GPGLL 消息包含经纬度等信息,消息格式为[5,6]:

消息各组成部分如下所示。

其次,可以利用串口调试助手对该模块进行配置,包括波特率,输出某种格式的定位语句。常用命令有
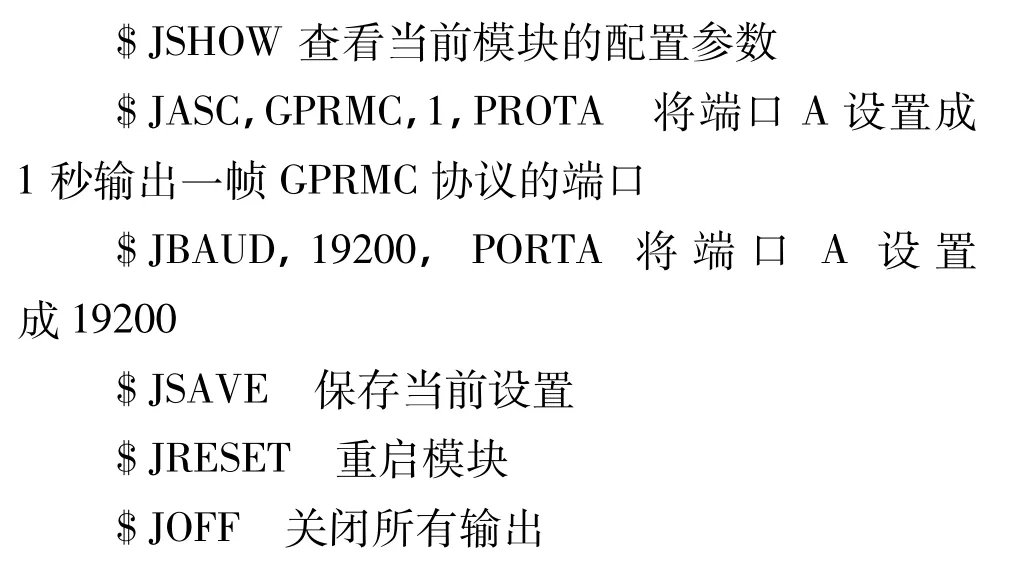
最后研究中为了减小开发难度和不确定因素,所以直接先使用具有人机界面的串口调试工具为HC12-OEM 进行配置,该模块对应每次的配置正确与否都有反馈。配置成功后的HC12-OEM 模块,会在“锁星”成功后,每秒对外发送GPRMC 模式的协议数据。其中需要注意的是,该软件的设置完成后一定要进行保存后重启,否则无法记忆当前的配置,如图3所示。
2.2 FPGA 中数据采集的实现
FPGA 在整个数据采集系统中是起到了核心作用,主要完成对对数据协议的接收,解析以及判断后存入存储器中等待CPCI计算机的读写。因考虑到GPGLL 格式数据中字节数较多(约有50 个字节左右),如果直接用硬件语言去一一判断,过程比较复杂,因此将具体的协议匹配任务交由计算机来完成,FPGA 只需要将其进行简单判断后存入内置的异步FIFO 存储器中[8-9]。FIFO 操作时序见图4,具体的实现过程如下所示。

图3 串口接收报文界面

图4 FIFO 操作时序图
首先利用Rxpart 模块进行波特率为19200 的数据接收,按照字节有序存入异步FIFO 中,供计算机进行读写。其次通过计算机发出的读写时钟信号对FIFO 进行读写操作。按字节进行有序得循环读取,并判断,有效则接收数据,经过处理后再由上位机界面中显示。
3 软件设计
采集系统软件设计中包含以下部分:GPS 数据接收模块、FPGA 判断解析模块及上位机信息显示。软件流程图如5所示。

图5 GPS 读写控制程序
图6 中FPGA 可编程控制器模拟串口总线的对HC12-OEM 模块进行数据采集并解析,具体的实现过程如下:

图6 GPS 数据采集程序流程图
a.HC12-OEM 接收机模块在上电后不会立即发送有效的数据,因为大约有1min 左右的“搜星”过程及“锁星”过程;
b.FPGA 接口程序中主要实现“串转并”的过程,以19200bps 速度接收报文,并按字节打入FIFO 中;
c.数据备妥后,等待计算机指令。
图7 中的上位机数据处理中,主要实现过程如下:
a.设计中为了提高通信的实时性,采用中断接收方式,当接收到报文时,首先存入RAM 中,按进行协议进行匹配,如果匹配成功则进行数据处理并更新上位机界面位置信息及显示。
b.等待有新的报文出现,循环执行。
具体的相关成员函数有:

图7 上位机处理流程图
4 结论
重点研究了GPS+FPGA 采集技术在雷达监控系统中的应用。充分利用目前较为流行的嵌入式硬件FPGA 运行速度快、内嵌软核的灵活性的特点与HC12-OEM 进行有效结合,检测及获取UTC 时间和精确的位置信息,并得到了很好的验证,同时对于后期雷达监控系统中GPS 采信息的采集技术的做了一个很好总结与展望。
[1]陈标龙,王保成,周江华.基于FPGA 和FIFO技术的多串口系统设计与实现[J].计算机测量与控制.2013.21(10):2835-2837.
[2]徐哲,丛琳等.全球定位系统在汽车运输中的应用[J].山西交通科技,2006,30(2):76-78.
[3]谭振宇,王少荣等.基于GPS 的电网状态监测系统[J].电力系统及其自动化学报2012.11,(11):113-115.
[4]董渊文,官洪运,胡辉.GPS 接收机伪码跟踪技术研究及仿真[J].系统仿真学报,2006,18(11):3209-3216.
[5]徐趁肖,陈军.基于GPS 的车辆导航监控系统研究[J].交通与计算机,2001,(5).
[6]王广运,郭秉义,李洪涛.差分GPS 定位技术与应用[M].北京:国防工业出版社,1996.
[7]IEEE Working Group Report.Synchronized Sampling and Phasor Measurements for Relaying and Control[R].IEEE Transon PWRD,1994,9(1):442 ~449.
[8]KELLEY C,BARNES J,CHENG Jing rong.Open source software for learning about GPS[C].15th Int Tech Meeting of the Satellite Division of the U.S.Inst of Navigation.Portland,Oregan:Oregon Convention Center,2002:2524-2533.
[9]ZHANG Yan-wei,LIU Di-chen,GUAN Bao-an,etal.Application of CAN bus in HV switchboard online detection system of substation[J].Electric Power Automation Equipment,2003,23(11):44-46.
