模糊免疫自适应PID控制在封水泵流量控制中的应用
2014-04-08张红升缪袁泉丁琪闻峣
张红升, 缪袁泉, 丁琪, 闻峣
(中交疏浚技术装备国家工程研究中心有限公司, 上海 201208)
0 引 言
封水泵通过向泥泵轴端和吸入端注水,防止泥泵工作过程中泥沙进入泵轴损坏泥泵.在实际施工过程中,随着泥泵转速及串并联工况的变化泥泵内部压力不断变化.为保证封水流量恒定,往往需要操作人员不停地调节封水泵转速,这使操作人员工作强度较大而且调节滞后性严重.目前控制封水泵的方法主要有高低两档调速和泥泵转速曲线拟合两种.高低两档调速虽然能满足封水流量的要求,但封水泵长时间工作在高功率输出模式下不利于节能减排,也会增加设备磨损.曲线拟合方法因不能区分泥泵串并联模式,在实际应用中受到很大限制.
为使封水泵控制更加自动化和智能化,即能根据封水流量的反馈值自动调整封水泵转速,进而调节封水流量至设定值,无须人为干预,本文引入模糊免疫自适应比例积分微分(Proportion Integration Differentiation, PID)控制方法对封水泵进行自动控制,通过模糊推理对PID参数进行自适应整定,达到灵活准确的控制目的[1].
1 封水泵工作及控制原理
泥泵是挖泥船的核心疏浚设备之一.在工作过程中,泥泵壳内会产生很大的压力,泵壳内的泥沙可能会在高压作用下冲破泥泵轴端和吸入端的水封,进而损坏泵轴.
1.1 封水泵工作原理
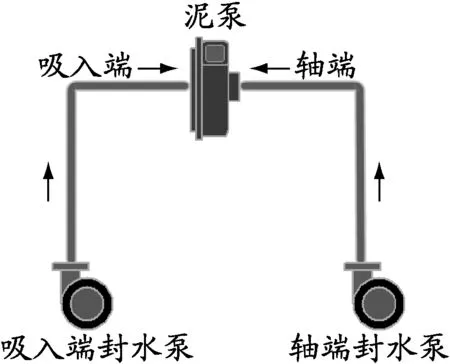
图1 封水泵工作示意
封水泵安装在泥泵旁边,通过管路将清水注入泥泵轴端和吸入端,防止泥沙损坏泵轴,见图1.泥泵运转前需要先启动封水泵,在运转过程中需要不断调整封水泵转速使封水流量不低于设定值.
1.2 封水泵控制数学模型
为保证泥泵正常工作,通常需要设定一个封水流量F′,封水流量与封水泵转速成正比例关系,通过调节封水泵转速可以调节封水流量.系统根据实际封水流量的反馈值F,通过PID整定,依据转速与流量的正比例关系控制封水泵的速度,进而达到控制封水流量的目的.封水泵控制模型见图2.
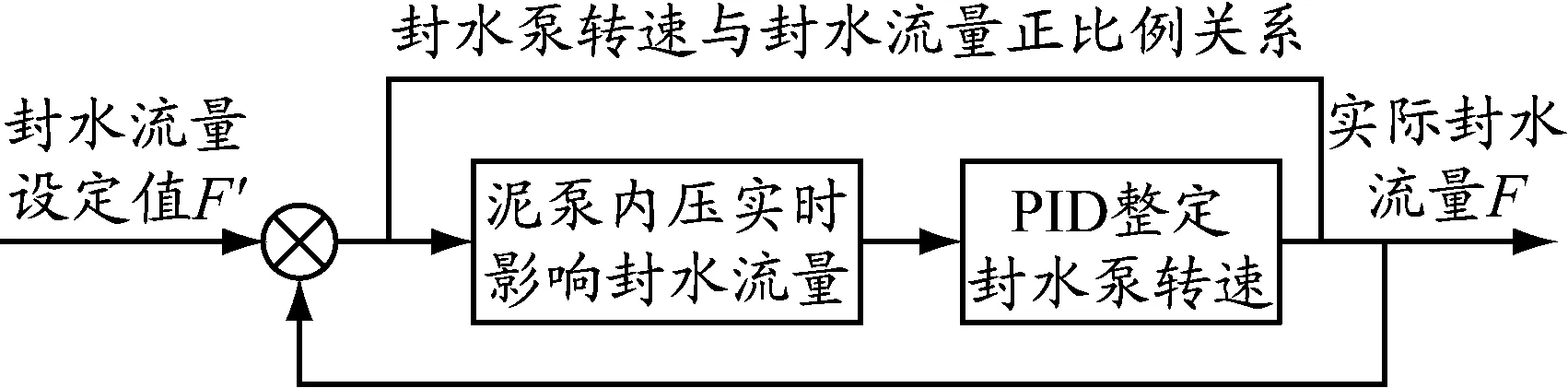
图2 封水泵控制模型
2 模糊免疫自适应PID控制
2.1 控制器概述
PID控制作为一种高效稳定的控制方法广泛应用于工业控制中.常用的PID控制器有:常规PID控制器、模糊PID控制器、模糊免疫PID控制器.常规PID控制器仅静态控制参数,不适用于非线性和大时滞系统控制.模糊PID控制器运用模糊控制原理,可在线动态整定控制参数,在非线性和大时滞控制系统中得到良好应用.模糊免疫PID控制器引入生物免疫学原理,结合模糊控制方法在线自适应整定控制参数,在实际应用过程中其性能比模糊PID控制器更加优越.
2.2 免疫反馈原理
根据文献[1-4]中对免疫系统的描述,生物免疫系统由T细胞和B细胞组成[2].T细胞可以根据外来抗原的数量分泌TH细胞和TS细胞,TH细胞用于刺激B细胞生成,TS细胞用于抑制B细胞产生.[3]当外来抗原较多时分泌的TH细胞量增加,TS细胞量减少;当外来抗原较少时,分泌的TH细胞量减少,TS细胞量增加.B细胞可以分泌抗体,抑制外来抗原的数量.[4]生物免疫系统机理[5]见图3.
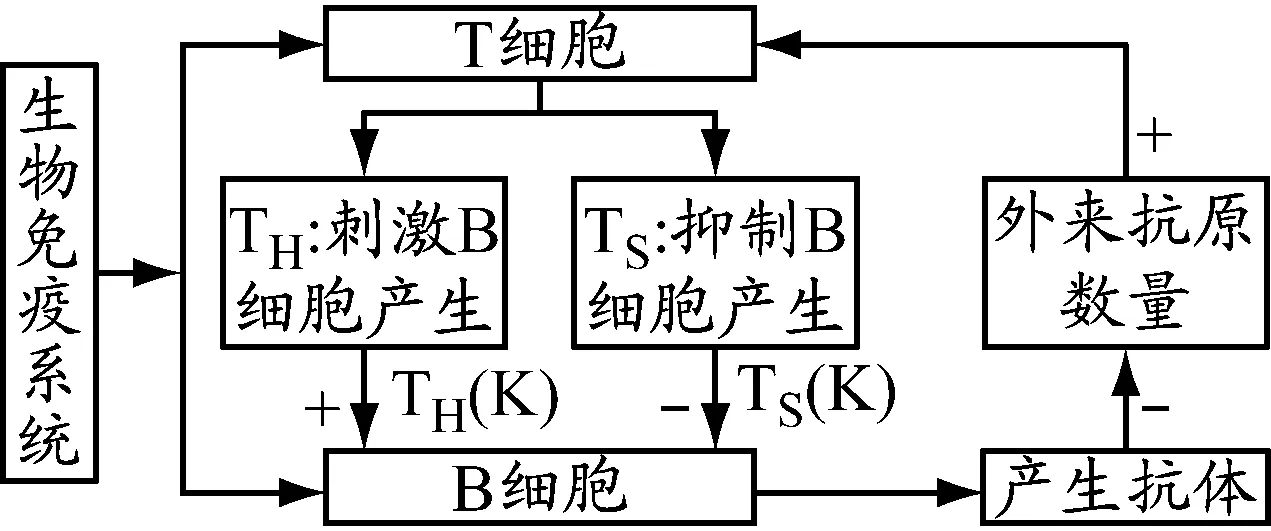
图3 生物免疫系统机理
2.3 模糊免疫自适应PID控制器设计
模糊免疫PID控制器是根据生物免疫系统机理设计出的一个非线性控制器.根据文献[5-6]中对免疫PID控制器的推导可知增量式免疫PID控制器的输出[6]
U(k)=U(k-1)+KP1(e(k)-e(k-1))+KIe(k)+
KD(e(k)-2e(k-1)+e(k-2))
(1)
式中:KP1=K(1-ηf(U(k),ΔU(k)))为比例调节系数(K=K1为控制反应速度(K1为激励因子);η=K2/K1为控制稳定效果(K2为抑制因子);f(*)为选定的非线性函数,表示细胞抑制刺激能力的大小,取值限定为[0,1));KI为积分系数;KD为微分系数[7];e为封水泵实际流量与设计流量的差值.
在实际施工过程中封水流量随泥泵内压实时变化,为保护泥泵,要求在封水流量小于设定值时系统能快速将流量增大到设定值,但对绝对精度要求不高.根据封水泵控制特点,本系统PID控制模式为:采用模糊免疫PID控制方法在线整定控制器的比例系数KP,采用模糊PID控制方法在线整定KI和KD.
模糊免疫自适应PID控制器的结构见图4,系统输入为封水流量设定值F′,反馈值为封水泵的实际流量F.PID控制器输入为e及其变化率Δe.模糊免疫调节实时计算出KP1,模糊推理系统实时计算出积分整定系数ΔKI和微分整定系数ΔKD.PID控制器的参数KP,KI,KD计算式为
(2)

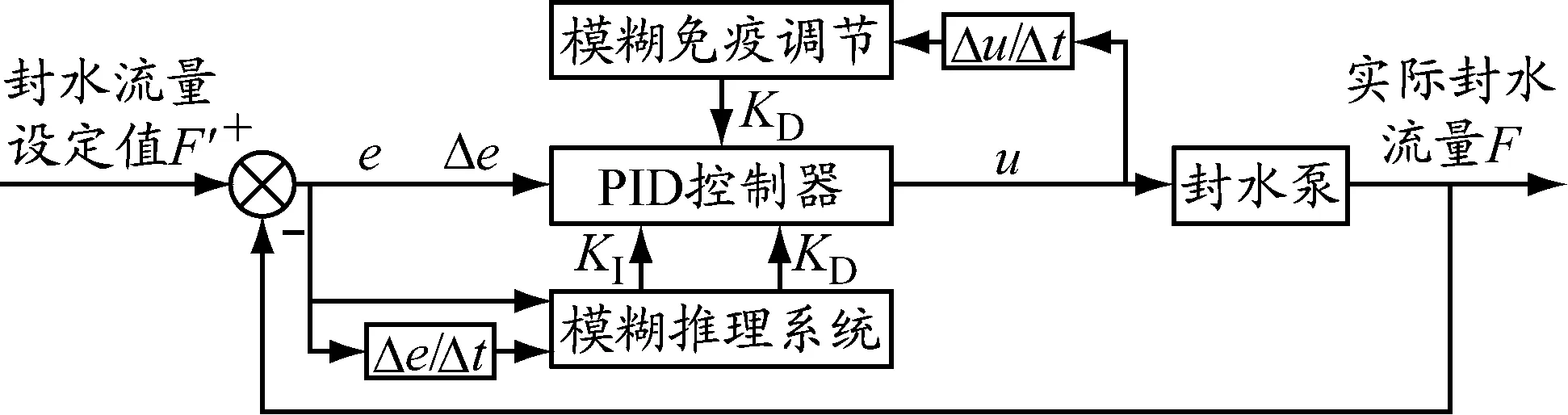
图4 模糊免疫自适应PID控制器结构
2.3.1 模糊免疫自适应PID控制器比例参数模糊免疫自调整
由式(1)可知,免疫PID控制的重点是比例参数中非线性函数f(*)的选取.[8]逼近非线性函数的方法很多,常用且最简单的方法是采用模糊控制器逼近非线性函数.本文采用一个二维模糊控制器逼近非线性函数f(*)[9-12],输入、输出变量模糊化参数见表1.
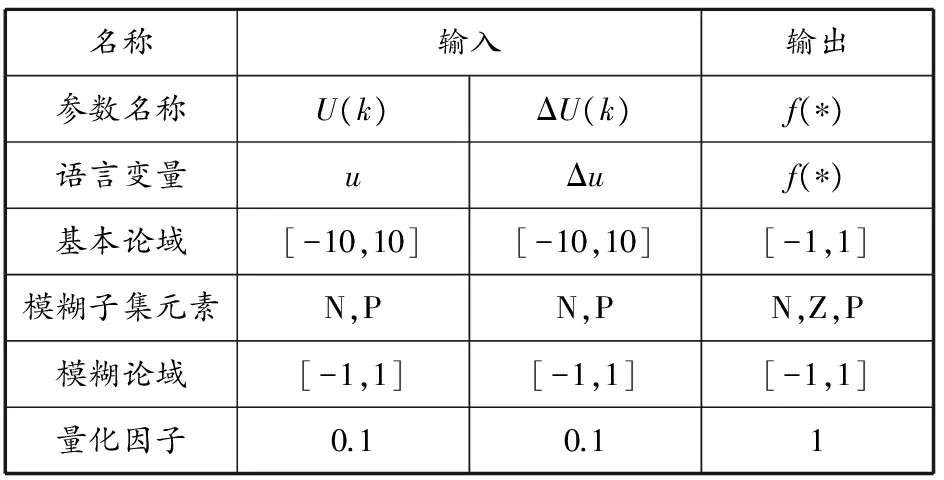
表1 输入、输出变量模糊化参数
为求出变量在模糊子集内的隶属度,作出输入、输出变量的隶属度函数曲线[13],见图5.

图5输入、输出变量隶属度函数曲线
根据李亚普诺夫稳定性定理,逼近非线性函数f(U(k),ΔU(k))的模糊控制规则[14]见表2.
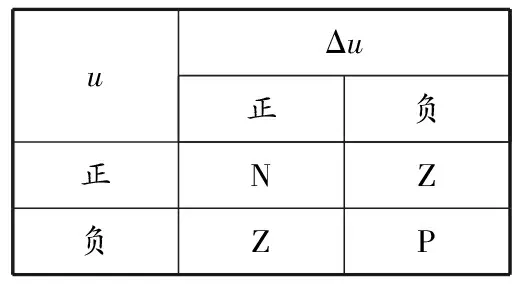
表2 模糊控制规则
2.3.2 模糊免疫自适应PID控制器积分和微分参数模糊自调整
系统积分和微分参数采用模糊控制进行整定,将e和Δe作为模糊控制器输入,输出为ΔKI和ΔKD.输入、输出变量模糊化参数见表3.
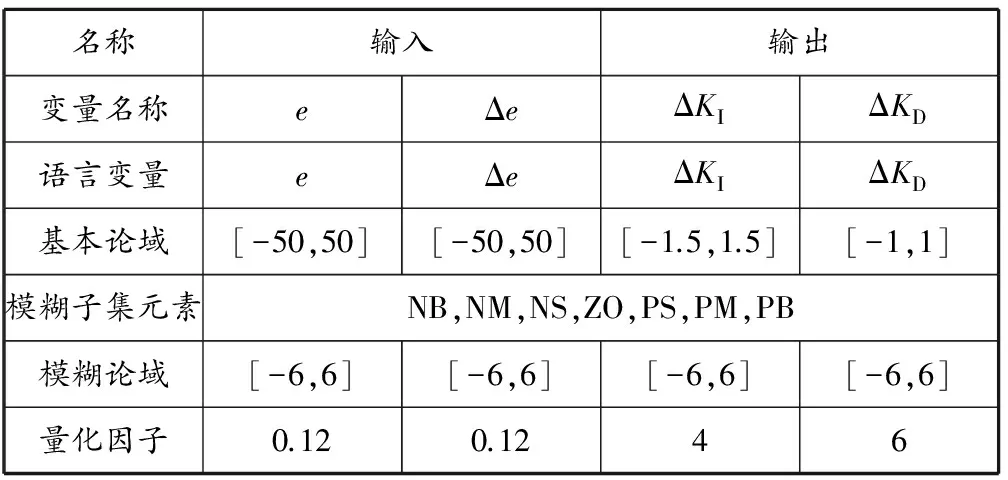
表3 输入、输出变量模糊化参数
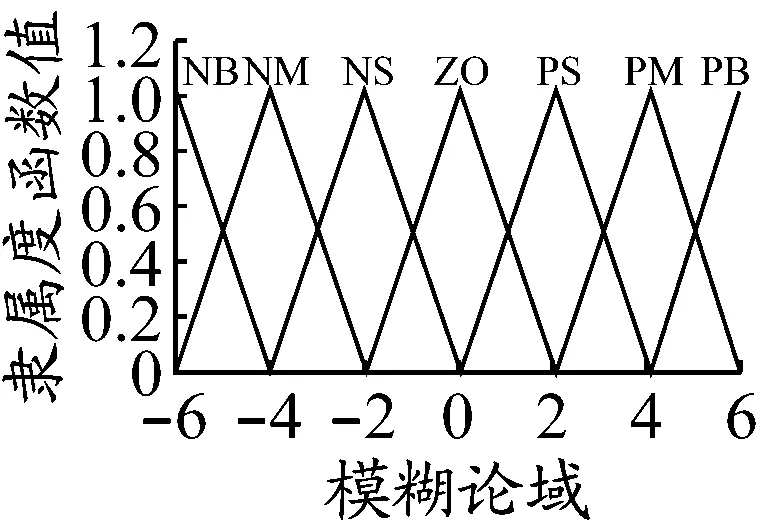
图6 三角隶属度函数曲线
考虑到设计简便及实用性要求,采用三角隶属度函数,见图6.根据实际操作经验和PID参数整定规则,得到对ΔKI和ΔKD整定的模糊控制规则,见表4和5.
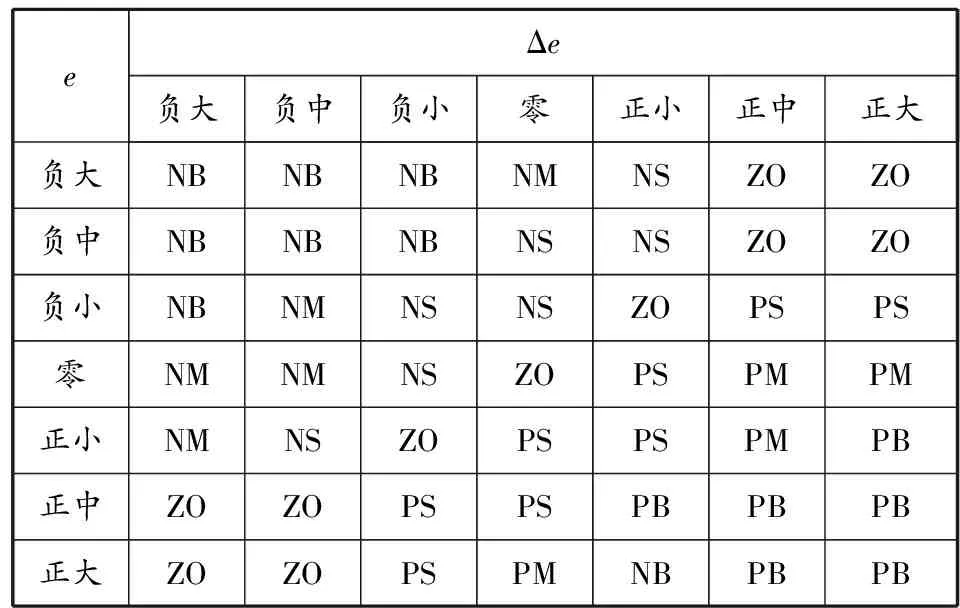
表4 ΔKI模糊控制规则
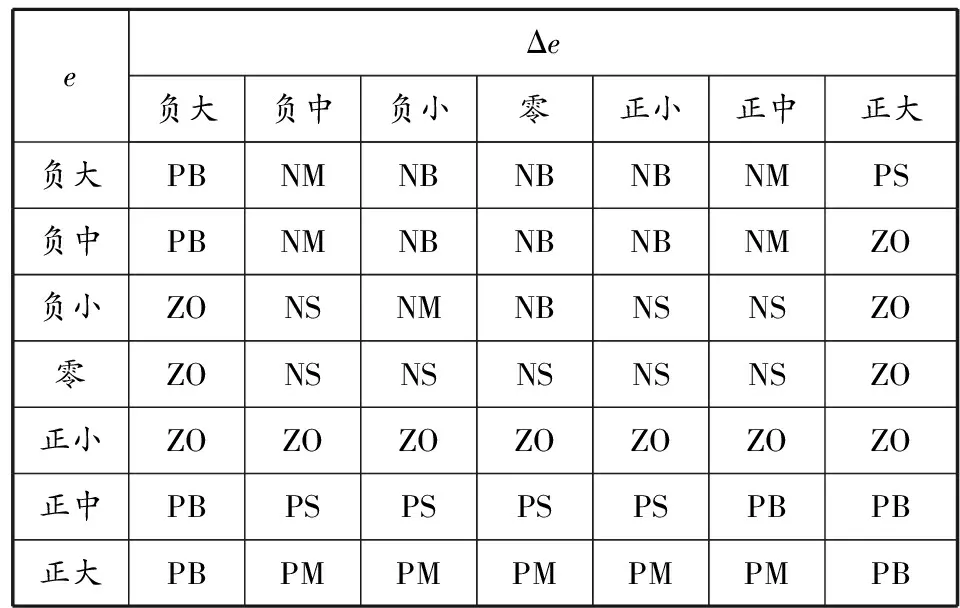
表5 ΔKD模糊控制规则
3 仿真分析

由图7可知,模糊免疫自适应PID控制器较常规PID控制器控制响应时间短、超调量小、动态稳定效果好.
4 应用实例

为直观地分析模糊免疫自适应PID控制器的动态控制效果,将实船检测的模糊免疫自适应PID控制数据与常规高低两档控制数据进行对比,见表6.
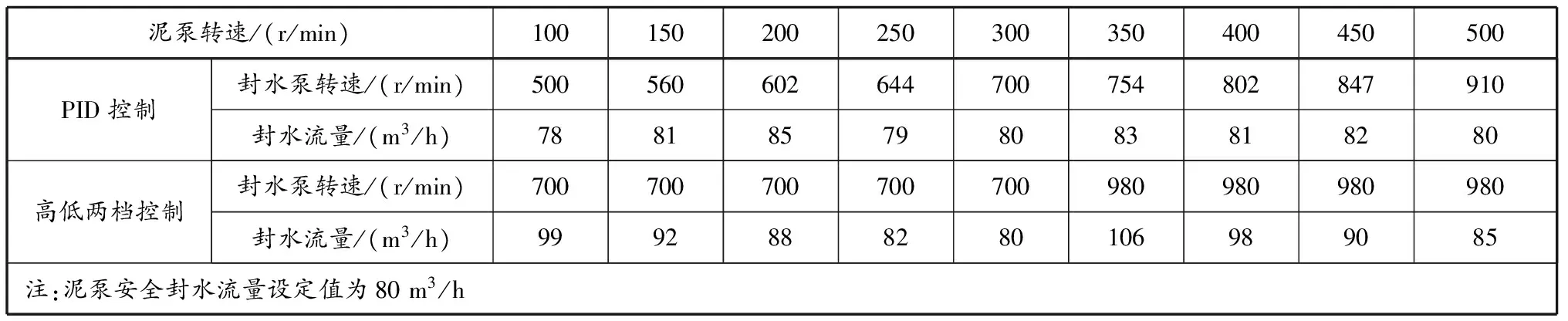
表6 实船控制数据对照
由表6可知:PID控制模式可以控制封水泵以最低的转速输出安全封水流量;高低两档控制模式虽然能保障安全封水流量,但是封水泵转速一直较大,封水流量超出安全设定值较多,造成不必要的能源消耗且使设备磨损加快.由此可见,模糊免疫自适应PID控制器可以很好地对封水泵流量进行控制.
5 结论
基于西门子PLC的模糊免疫自适应PID控制器可以根据泥泵工况自动动态调整封水泵转速,从而保持设定的封水流量.其自动动态调整的特性使其在解放人的劳动力的基础上,最大限度地减少封水泵的能源消耗和设备磨损.本控制器在上海航道局新海虎8号10 000 m3耙吸挖泥船上得到很好的应用.
参考文献:
[1]王培胜, 胡知斌. 模糊自适应PID控制在耙吸式挖泥船主动耙头的应用[J]. 中国港湾建设, 2012(4): 107-110.
[2]付冬梅, 郑德玲, 位耀光, 等. 人工免疫控制器的设计及其控制效果的仿真[J]. 北京科技大学学报, 2004, 24(4): 442-445.
[3]谈英姿, 沈炯, 吕震中. 免疫PID控制器在气温控制系统中的应用研究[J]. 中国电机工程学报, 2002, 22(10): 148-152.
[4]王东风, 韩璞. 基于免疫遗传算法优化的气温系统变参数PID控制[J]. 中国电机工程学报, 2003, 23(9): 212-217.
[5]刘金琨. 先进PID控制MATLAB仿真[M]. 北京:电子工业出版社, 2005.
[6]丁永生, 任立红. 一种新颖的模糊自调整免疫反馈控制系统[J]. 控制与决策, 2000, 15(4): 443-446.
[7]孙涛. 基于模糊免疫自适应PID的智能控制算法的研究[D]. 大连: 大连海事大学, 2009.
[8]王斌, 李士勇. 模糊免疫非线性PID控制的仿真研究[J]. 哈尔滨商业大学学报, 2006, 22(6): 72-75.
[9]季本山. 基于PLC的模糊PID船舶自动舵[J]. 上海海事大学学报, 2009, 30(4): 57-62.
[10]郑天府, 肖健梅, 王锡淮, 等. 同步发电机线性多变量与PID结合的励磁控制[J]. 上海海事大学学报, 2006, 27(2):37-41.
[11]王洋, 林叶春, 梁森, 等. 轨道龙门吊行走大车的啃轨问题及纠偏控制[J]. 上海海事大学学报, 2008, 29(3): 65-70.
[12]王正林, 王胜开, 陈国顺. MATLAB/SIMULINK与控制系统仿真[M]. 北京: 电子工业出版社, 2005.
[13]王斌, 李爱平. 模糊免疫非线性PID控制的优化设计[J]. 控制工程, 2007,14(S1): 81-83.
[14]王焱. 模糊免疫PID控制器的设计与研究[J]. 计算机仿真, 2002, 19(2): 67-69.
[15]辛菁, 刘丁, 杜金华, 等. 基于遗传整定的模糊免疫PID控制器在液位控制系统中的应用研究[J]. 信息与控制, 2004, 33(4): 481-485.
[16]SIEMENS. 用于S7300和S7400系统和标准功能的系统软件参考手册[M]. 北京: Siemens AG, 2004: 25.
