基于AIS海上交通调查的宁波—舟山核心港区船舶定线制
2014-04-08刘轶华肖英杰关克平
刘轶华, 肖英杰, 关克平
(上海海事大学 商船学院,上海 201306)
0 引 言
宁波—舟山核心港区已经成为一个一干线四大基地(集装箱远洋干线港、国内最大的矿石中转基地、国内最大的原油转运基地、国内沿海最大的液体化工储运基地和华东地区重要的煤炭运输基地)综合型大港.[1]大型船舶进出该港区一般都航行在推荐深水航路上,因此在推荐深水航路附近水域船舶密度大、会遇频繁.随着新一轮港区开发建设以及渔业养殖、捕捞、采砂等海洋经济活动的日益频繁,进出该水域船舶的大型化趋势将日益显著,船舶通航密度将进一步加大,船舶会遇率也会提高,通航环境将趋于复杂化和无序化,水上交通风险将增加.为推进宁波—舟山核心港区水上交通的可持续发展,适应船舶大型化、专业化和快速化的发展趋势,保障水上交通安全,水上交通主管部门拟在宁波—舟山核心港区订立船舶定线制,希望能够通过船舶定线制的实施,有效梳理虾峙门水道及其辖区水域的船舶交通流,提高船舶交通效率和安全水平,提升核心港区的竞争能力.因此,需对辖区水域的交通进行调查,掌握宁波—舟山核心港区船舶交通的实际情况,为宁波—舟山核心港区的船舶定线制设计提供基本素材.
1 海上交通调查
海上交通调查就是采用一切有效手段收集海上交通的基本数据并随之进行统计分析和理论研究,以便从宏观上和微观上了解和掌握海上交通的实际状况、基本特征和一般规律.海上交通调查主要分为海上交通观测、查阅港口船舶记录与统计报表和问卷调查,其中海上交通观测是主要和基本的调查方法,它是收集海上交通宏观数据的直接手段.[2]海上交通观测一般可分为视觉观测、雷达观测和航空摄影等3种方法.[3]随着船舶自动识别系统(Automatic Identification System,AIS)在船舶上的普遍应用,基于船舶AIS数据的海上交通调查成为一种新的海上交通调查手段.[4-6]结合电子海图显示系统,特定水域船舶AIS交通流信息能直观地反映该水域宏观交通流和门线船舶交通流微观信息和数据,具有传统海上交通调查方法无法比拟的优势.[7-8]
2 基于AIS的海上交通调查
2.1 基于AIS的海上交通调查简介
基于AIS的海上交通调查按时间序列分为AIS数据收集、AIS数据筛选以及AIS数据分析等3个步骤[9].如果收集的AIS数据在时间跨度上足够长,那么基于AIS数据的船舶交通流量轨迹图能很直观地表征特定水域宏观交通流.一般AIS数据都由船舶交通服务(Vessel Traffic Services,VTS)中心提供,能够满足时间跨度长的要求.基于AIS的海上交通调查流程见图1.
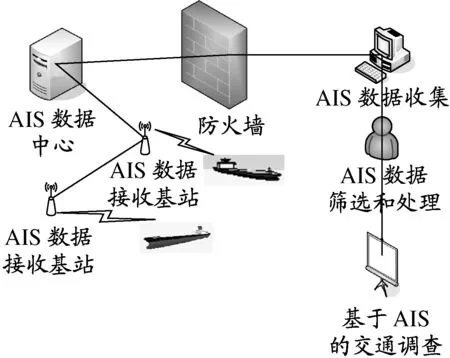
图1 基于AIS的海上交通调查流程
2.2 基于AIS的核心港区船舶交通流宏观分析
为获取核心港区现阶段的船舶交通情况,在2008年4月4日至7日组织实施为期3天的基于AIS数据的宁波—舟山核心港区船舶交通流观测,对于没有装备(或未开启)AIS的船舶,通过VTS中心的信息平台进行人工辅助观测. 基于上述观测资料,可以在电子海图信息系统上清晰地显示核心港区的船舶航迹分布[10],见图2.从图中可以看出整个核心港区主要存在4个船舶交通会遇区域:桃花岛西北部水域、峙头山与岙山之间进入螺头水道的水域、大猫岛与大榭岛之间进入横水洋的水域、马峙联检过驳锚地水域.图2中标示1,2,3的区域为核心港区推荐深水航路上的重点会遇水域.
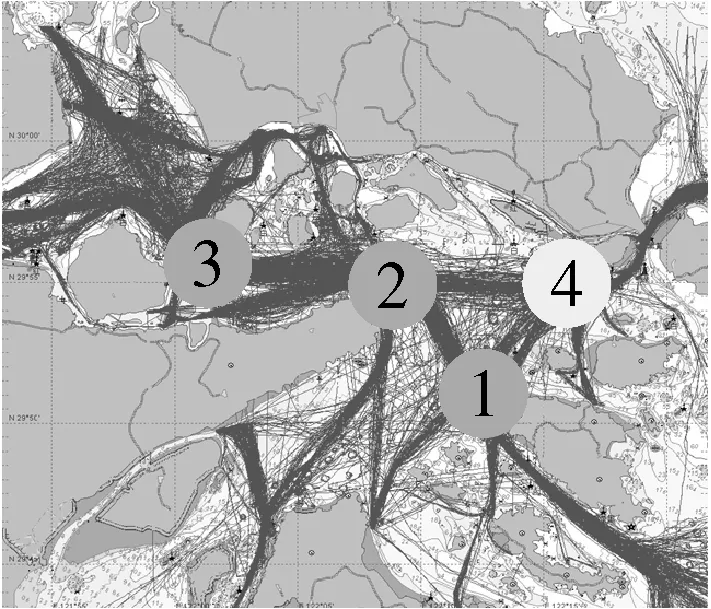
图2 宁波—舟山核心港区船舶航迹

图3 宁波—舟山核心港区推荐深水航路
辖区内船舶航迹基本是沿着推荐深水航路航行的,见图3.以从外海进港方向为例,虾峙门水道可航水域宽度受到限制,船舶航迹呈现明显收敛趋势;出虾峙门水道,在峙头洋水域航迹由收敛向发散转变,航迹覆盖水域宽度较大;到达2号水域时,这种发散趋势达到最大;航经螺头水道到达3号水域前,航迹又趋于收敛,过螺头角后,航迹又趋于发散;横水洋册子水道可航水域宽阔,航迹较分散.通过VTS中心人工辅助观测发现,在佛渡水道有两股较集中小船(未装备或未开启AIS的船舶)交通流在1号水域的上溜网重岛北面和小洋猫岛东南附近水域横穿推荐深水航路.因此,通过以上的船舶交通调查,可以宏观上显现出核心港区主要交通流方向和各水域船舶交通流交叉区域位置和粗略情况,便于在设计定线制方案时充分考虑现有航路习惯及航路交叉水域警戒区的设置等问题.
2.3 基于AIS的核心港区船舶交通流微观分析
以从外海进港方向为例,在不同的航段截取航迹的断面进行数据分析,采用门线图表征航道断面的船舶交通流微观情况,见图4~7.
观测期内通过虾峙门水道虾峙角附近门线的船舶203艘次,其中进99艘次、出104艘次,航迹分布水域宽度约1 600 m,从200 m等宽的船舶过门线柱状图可以看出,船舶进出总体是各自靠右航行的,进港的76%和出港的84%均在航道中心线各自右侧航道水域内.该门线最左面200 m水域航行的船舶占进港的1%,平均船长为300 m,平均过线航速为12.8 kn.根据以上信息并结合AIS信息查询,确定上述船舶为从虾峙南锚地起锚进港的超大型船舶;出港船舶的16%在门线右边800 m水域通过,平均船长99~189 m,结合相关船舶航迹附带信息可知,其中的大部分船舶是向北方航行的.对不同航段门线图的分析,可以为船舶定线制中主轴基本尺度的确定提供参考数据;在航迹交叉的水域,也可以利用航迹交叉的4个水域门线图分析交叉水域的船舶交通情况,为警戒区的设置提供依据.
3 核心港区定线制设计及实施
3.1 设计思路
船舶定线制设计时需要考虑核心港区推荐深水航路附近水域的通航现状、港区发展规划、通航安全和交通便捷情况.[11]为设计科学合理的定线制方案,首先需要确定船舶定线制设计方案中的主轴线.主轴线的确定需要考虑船舶流量的现状、船舶流量的发展趋势、航道上船舶流量的主要方向、航迹分布等要素.在确定主轴线的基础上,考虑交叉航路警戒区的设置,确保定线制设计的科学合理性.因此,核心港区船舶定线制设计和主要尺度的确定就显得尤为重要,需要选取科学的依据、合理衔接前后各主要航道、梳理不同的船舶交通流、满足辖区水域安全通航的需求.核心港区船舶定线制设计思路见图8.
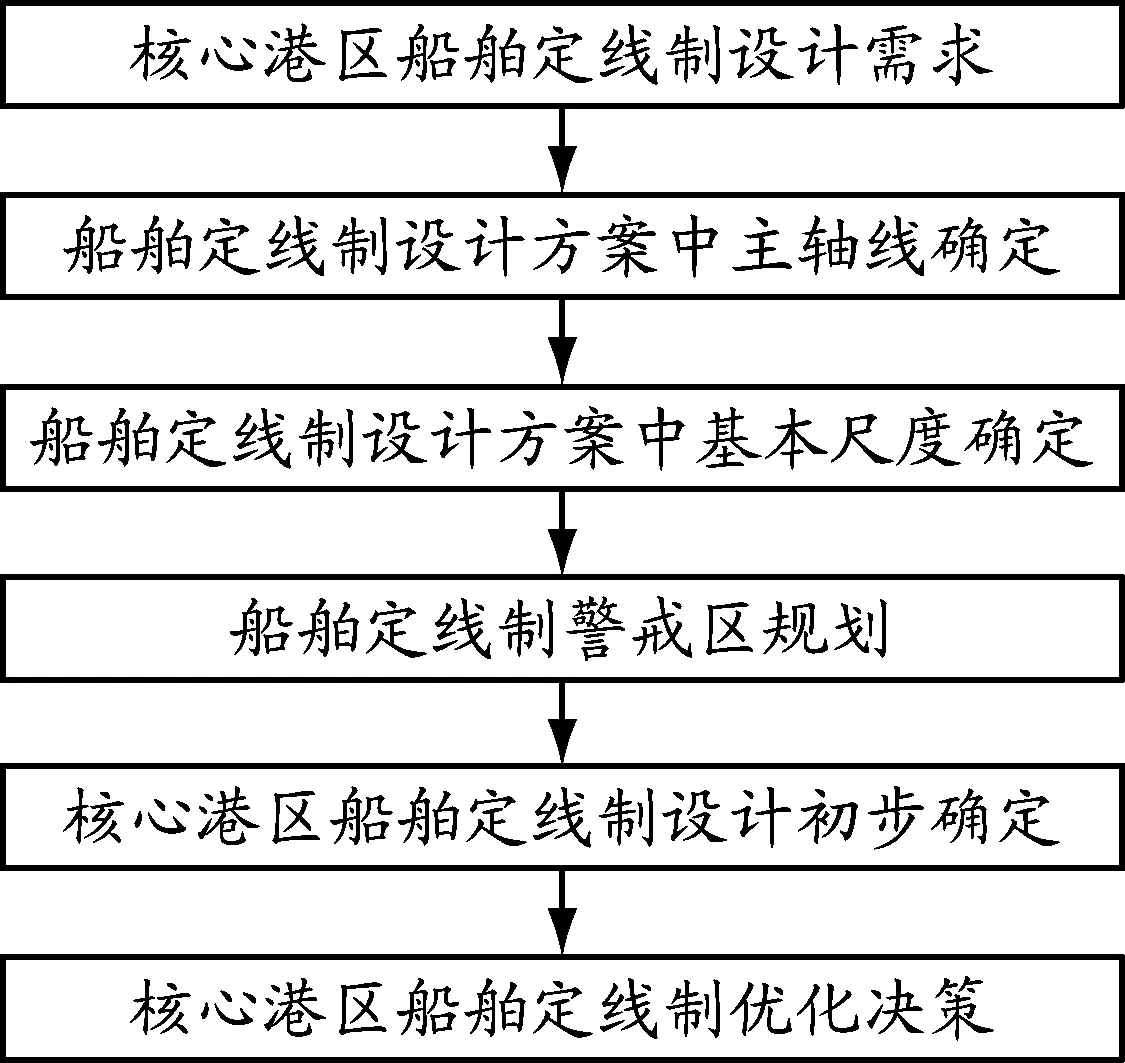
图8 核心港区船舶定线制设计思路
3.2 设计原则
船舶定线制主要通过分隔反向船舶交通流,减少或避免对遇或接近对遇的小角度交叉局面,理顺区域船舶交通流,以利于海上船舶交通组织和提高船舶交通效率,进而减少区域内水上交通事故的发生率,避免海洋环境污染.船舶定线制设计应遵循的原则如下:
(1)尽可能遵循该区域的船舶习惯航路.
不必在每笔交易之前都进行资信调查,多数时候厂家可直接参考已设定的经销商信用额度做决策。对于欠款较多或超过信用额度的经销商,必须定期进行资信调查;至于在信用额度内或欠款较少的经销商,则不必经常大费周折,可采取不定期方式,进行小范围的资信调查,从而节省资信调查的人力、物力和时间等成本。
(2)尽可能减少在一条航路中航向的改变.避免在接近交通汇聚区或预计会出现大量船舶交叉航行的区域改变航向.
(3)尽量少设置交通汇聚区和航路连接处且使彼此尽可能远离;设置邻近的分道通航制时考虑将方向接近相反的交通流隔开远些;航路连接处不设置在可不按交通流方向航行船舶(如轮渡)较集中的区域.
(4)最佳地使用该区域的助航设施及国际公约或IMO决议或建议所要求的船用助航设备.
(5)保证主管机关能获得船舶定线区域及其附近水域的水深、底质和航行危险物等与航行安全相关的详细资料.
3.3 定线制设计
3.3.1 主轴线的确定
在确定宁波—舟山核心港区船舶定线制设计方案中的主轴线时,分别考虑该港区推荐航路附近水域航路图和船舶航迹分布.[12]根据观测期内的AIS数据和VTS中心人工辅助观测数据,推荐航路附近的交通流基本上呈现一条主轴、多级交叉的格局.主轴是核心港区船舶的习惯航路,另有许多小船习惯航路与主轴交叉,其中虾峙门口至涂泥嘴北侧航路最复杂.定线制设计方案中主轴线(见图9)由10点组成,其位置及各点之间的航向、航程见表1.

图9 主轴线示意
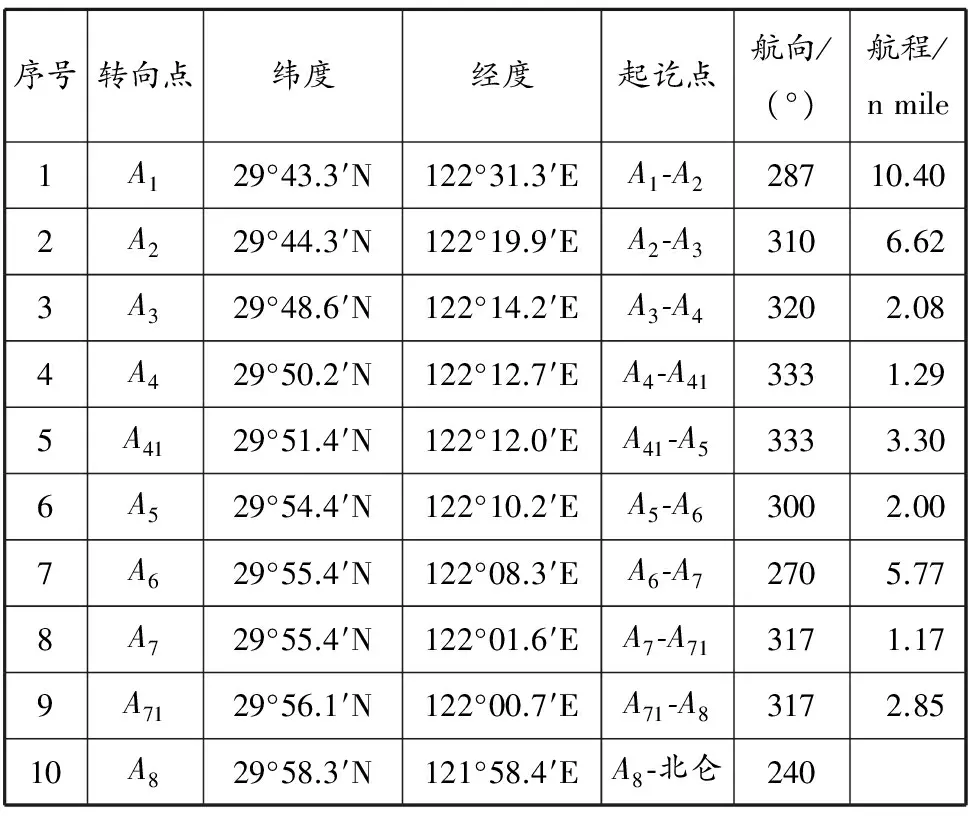
表1 主轴线各点位置及各点之间的航向和航程
3.3.2 基本尺度的确定
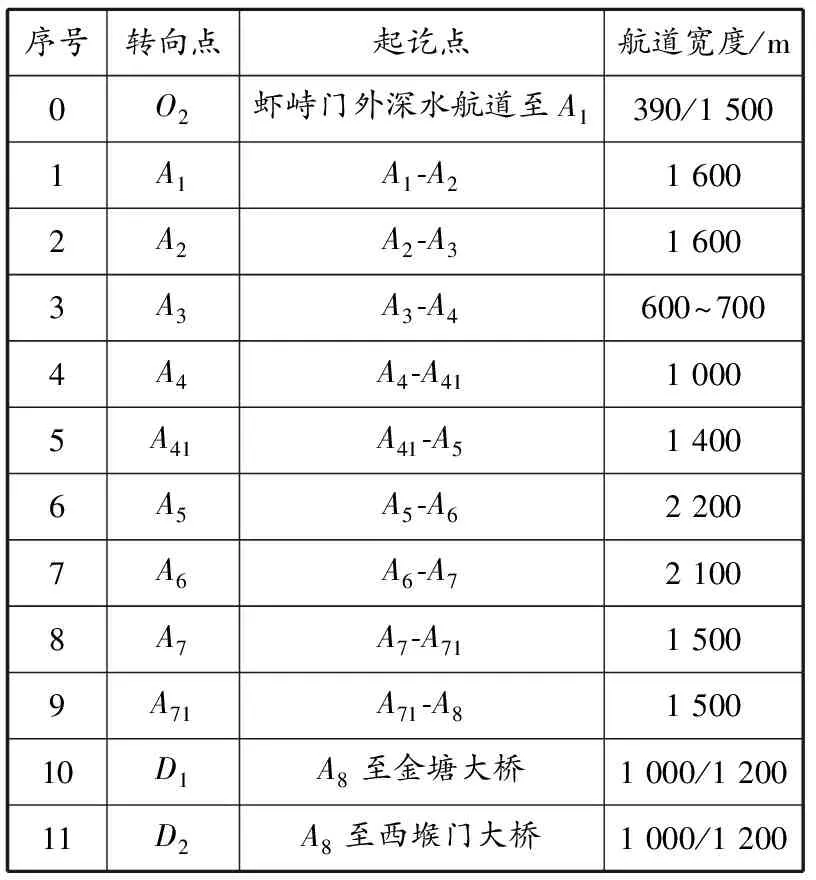
表2 各航段之间的航道宽度分布
根据主轴线附近水域推荐深水航路的可航宽度,结合基于AIS的核心港区船舶交通流航迹分布数据,再考虑船舶机动操纵的余地,定线制设计方案中主轴线的基本宽度确定如下:
(1)虾峙门外深水航道航段拥有深水人工航槽,全长10.5 n mile,通航底标高-22.1 m(理论深度基准面),航道设计宽度为390 m.规划以深水航槽为依据设置深水航路,宽度为390 m.
(2)虾峙门进港航道目前通航水域宽度700~2 800 m,航路最窄处在虾峙门航道下栏山海面,可航水域宽度约为700 m,规划航道宽度取700 m,中间设隔离线,单向航道宽度为350 m.
(3)峙头洋目前航道水域宽度1 400~2 200 m,规划航道宽度取1 000 m,单向航道宽度为500 m,中间设宽度为200 m隔离带.
(4)螺头水道目前通航水域宽度为2 500 m,规划航道宽度取1 000 m,单向航道宽度为500 m,中间设宽度为200 m隔离带.
(5)册子水道目前通航水域宽度为3 900 m,规划航道宽度取1 000 m,单向航道宽度为500 m,中间设宽度为200 m隔离带.
3.3.3 警戒区的设置
为满足不同航路船舶的通航需求并保证船舶会遇时的安全,需要科学和合理地规划船舶定线制中警戒区的位置和范围,考虑不同航路船舶流量的现状及其发展趋势,航道上船舶流的主要方向、轨迹分布和主要会遇区域,需要特殊安全保证的岛际客运船舶习惯航路等要素.[13]交叉航路船舶定线制警戒区规划见图10,具体说明如下.
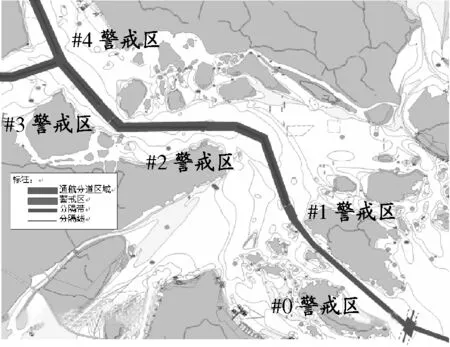
图10 宁波—舟山核心港区定线制警戒区规划
①#0警戒区设置在A1附近分道通航水域,为多通道的四边形,分别设置南、北方向和深水航道的通航分道.南、北方向的通航分道设计成分隔带为0.11 n mile,单向通航宽度为0.35 n mile,边长均为0.81 n mile的平行四边形,是由以下4点连线构成的水域:29°45′21.5″N,122°19′21″E;29°44′51″N,122°20′06″E;29°43′41″N,122°19′37″E;29°44′12″N,122°18′54″E.
②#1警戒区设置在A4附近分道通航水域,是底边为0.65 n mile,高为1.08 n mile的矩形,由以下4点连线构成的水域:29°50′27.5″N,122°11′59″E;29°50′45″N,122°12′41″E;29°51′49″N,122°12′06.5″E;29°51′31″N,122°11′26″E.
③#2警戒区设置在A5与A6之间的分道通航水域,是长边为2.37 n mile,短边为1.94 n mile的四边形,由以下4点连线构成的水域:29°55′42″N,122°07′55″E;29°55′03″N,122°05′12″E;29°55′03″N,122°07′23.5″E;29°55′42″N,122°05′12″E.
④#3警戒区设置在A7附近分道通航水域,是以长边为1.08 n mile,短边为0.65 n mile的长方形,由以下4点连线构成的水域:29°56′18.5″N,122°01′07″E;29°55′46″N,122°00′37″E;29°57′05″N,122°00′17″E;29°56′33″N,121°59′48″E.
⑤#4警戒区设置在A8附近分道通航水域,是边长为0.65 n mile的正方形,由以下4点连线构成的水域:29°59′27″N,121°57′28″E;29°59′51″N,121°58′04″E;29°59′20″N,121°58′30″E;29°58′56″N,121°57′54″E.
3.4 定线制实施方案
依据宁波—舟山核心港区定线制设计方案,经过海事部门、港航企业及引航站等专家的评审,认为:#1警戒区设置应该考虑桃花岛北面船舶经警戒区出港时桃花岛的遮蔽影响;#2警戒区不要设置在转向段,建议在与A7同纬度区域范围另行专题研究;警戒区设置太多,建议将#4警戒区改成环形道.
根据上述建议,最终确定宁波—舟山核心港区定线制由分道通航制、环形通道、深水航槽、警戒区和沿岸通航带组成,其中有15条通航分道、1条环形航道、1条深水航道、4个警戒区和若干沿海通航带组成,全长50.61 n mile,沿途共设有13条报告线和16座AIS虚拟航标,是目前我国沿海采取通航分道最多、定线制形式最复杂的船舶定线制,实施方案见图11[14],基本上与AIS海上交通调查后初步拟定的主轴线及警戒区位置一致,只是在位置和尺度上有微调.

图11 宁波—舟山核心港区船舶定线制实施方案
4 结 论
基于AIS信息的海上交通调查为宁波—舟山核心港区的船舶交通状况把脉,在补充VTS中心人工辅助观测的小船交通流量后,此次海上交通调查能从宏观上反映船舶习惯航路及交叉航路的水域,为定线制主轴的确定、分道通航水域主轴的确定和警戒区位置的设定提供详细参考数据;又能从微观上分析通过门线上船舶的相关参数及进出港船舶航迹分布,为定线制方案中具体主尺度的确定提供参考依据.
参考文献:
[1]汪长江, 杨美丽. 宁波—舟山港一体化建设发展障碍与对策[J]. 经济社会体制比较, 2008(1): 172-176.
[2]吴兆麟. 海上交通工程[M]. 大连: 大连海运学院出版社,1993: 22-44.
[3]金一丞, 徐德兴, 杨赞, 等. 用于海上交通调查的新方法[J]. 大连海运学院学报, 1988, 14(1): 49-56.
[4]白宇明, 戴冉, 孙立成, 等. AIS在海上交通调查中的应用[J]. 中国航海, 2006, 29(1): 82-85.
[5]纪贤标, 邵哲平, 潘家财, 等. AIS信息分布式采集系统的开发及关键技术[J]. 上海海事大学学报, 2007, 28(1): 28-31.
[6]周剑敏, 王捷. 基于AIS数据的智能船舶动态视频监控系统设计[J]. 上海海事大学学报, 2009, 30(4): 26-29.
[7]王艳军, 王晓峰. AIS和北斗终端组合在船舶动态监控中的应用[J]. 上海海事大学学报, 2011, 32(4): 17-21.
[8]翁跃宗, 孙腾达. 基于电子海图的船舶定线辅助系统软件的实现[J]. 中国航海, 2004, 27(3): 8-11.
[9]张寿桂, 翁跃宗, 彭国均. 台湾海峡船舶定线制设计的数据空间处理与分析[J]. 地球信息科学, 2006, 8(3): 62-68.
[10]肖英杰. 宁波—舟山港核心港区深水航路船舶定线制设计研究报告[R]. 上海海事大学, 2009.
[11]颜江峰. 船舶定线制对提高通航效率的作用[J]. 船海工程, 2006(4): 83-84.
[12]张浩, 俞斌, 肖英杰, 等. 船舶定线制设计方案评价[J]. 上海海事大学学报, 2010, 31(2): 5-9.
[13]史云剑. 船舶定线制规定中警戒区的涵义[J]. 航海技术, 2008(2): 8-9.
[14]叶国鑫, 肖英杰. 宁波—舟山港核心港区深水航路船舶定线制解读[J]. 中国海事, 2010(8): 27-30.