导弹配平飞行数值模拟及控制优化
2014-04-06达兴亚赵忠良马晓永
达兴亚,陶 洋,赵忠良,马晓永
(1.空气动力学国家重点实验室,四川 绵阳 621000;2.中国空气动力研究与发展中心 高速空气动力研究所,四川 绵阳 622661)
0 引 言
传统上以定常气动力和动导数数据建立气动力模型,通过计算机仿真设计和检验飞行器控制律[1-2]。这是一种基于线化假设的气动、飞行力学分析方法,由于没有计入非定常、非线性气动力效应,在描述机动飞行时具有很大的不确定度[3-4]。依据线性理论设计的控制方法在试飞后可能需要作出较大幅度修改。
虚拟飞行数值模拟[5-7]是计算流体力学与飞行力学交叉的新方向,是解决先进飞行器的气动/运动耦合问题及控制问题的新途径。计算流体力学能够模拟非线性、非定常气动力效应,它与刚体六自由度运动方程耦合计算,能更好地反映实际飞行过程。尽管虚拟飞行数值模拟技术还面临一些技术上的困难[7],但已有一些应用,如外挂分离[8]、导弹受控飞行[5,9-10]、自由飞[11]、飞机受控飞行[6,12]。近年来,国内对集成CFD、飞行力学和自动控制律的虚拟飞行技术产生了浓厚的兴趣,并已有初步应用。然而,这些工作基本是不带控制[13-14]或开环控制[5,15],对闭环控制仿真的研究较少。
本文在现有虚拟飞行数值模拟程序VFNS(Virtual Flight Navier-Stokes solver)[15]基础上,应用虚拟飞行技术来检验和优化导弹模型纵向配平飞行PID控制律,研究闭环控制模拟的可行性和参数影响。
1 虚拟飞行数值模拟方法及检验
控制方程为非定常RANS方程和刚体六自由度运动方程,采用基于结构嵌套网格的有限体积求解器,取Roe格式和S-A湍流模型,时间推进使用双时间步,采用嵌套网格方法模拟舵面偏转;飞行力学方程采用Adams预估校正法求解,气动/运动耦合使用双时间步三阶Adams预估校正策略,预测步计算格式为:
修正步计算格式为:
研究表明,这种耦合方法在保证一定计算精度条件下,能显著增大时间步长,有利于缩短CFD计算时间,从而显著提高计算效率。具体流场/飞行力学计算方法和结论见文献[13]。
模拟了窄条翼布局导弹纵向开环虚拟飞行,外形与图1类似。弹身采用标准对接网格,尾舵采用嵌套网格,总量约620万,首先让俯仰舵在0.3s内偏转-2°,然后保持4s。计算 Ma=0.6,从图2看出,在舵偏期间,试验、仿真、模拟结果吻合很好,说明较好地捕捉到了模型的非定常气动特性,验证了计算方法和网格,可以用于此条件下的闭环控制模拟。

图1 窄条翼布局导弹-IRIS-TFig.1 Strake missile(IRIS-T)
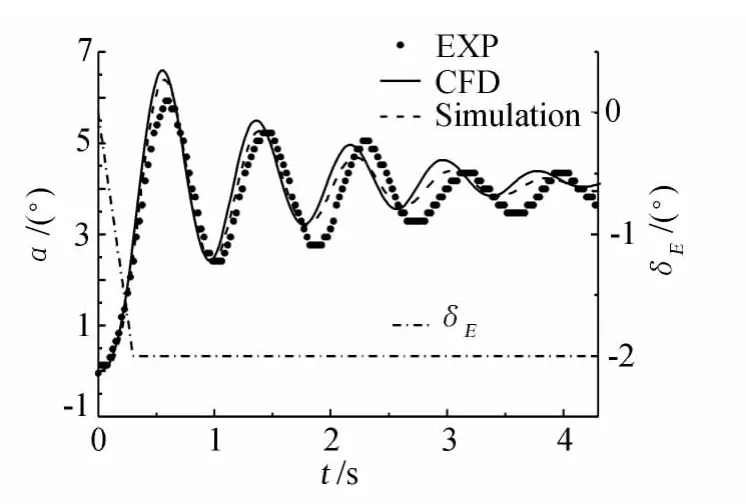
图2 纵向虚拟飞行数值模拟结果Fig.2 Longitudinal virtual flight simulation result
2 配平飞行PID控制模拟
2.1 控制方法
以迎角为控制对象,给定目标迎角α0,采用单位负反馈,对俯仰舵偏角δE实施PID控制,控制框图如图3所示,其中简化了舵控系统。这里PID控制器

kp、kd、ki分别为比例、微分、积分参数。G0(s)为简化的纵向传递函数,在建模时采用小扰动纵向线性模型[2],忽略了控制舵的动态特性,开环仿真结果如图2所示,与试验和CFD结果吻合较好。根据经典控制理论设计了控制律

单位阶跃响应曲线如图4所示,上升时间0.06s,调节时间0.48s,超调量13%,动态响应较好。
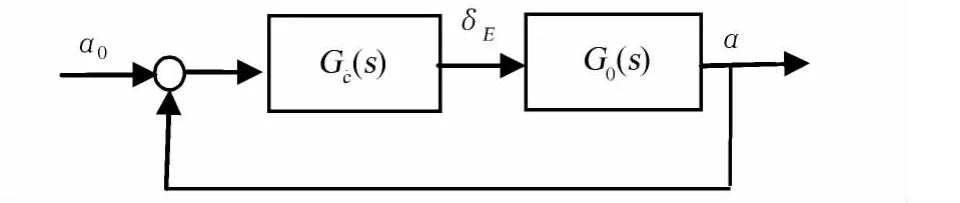
图3 迎角PID控制结构Fig.3 Structure of PID control for angle of attack

图4 PID控制阶跃响应Fig.4 Step response of PID control
2.2 配平飞行数值模拟
一般认为,阶跃输入对系统是最严峻的工作状态,如果阶跃输入作用下的动态性能满足要求,那么系统在其它形式的输入作用下,其动态性能也是满意的。就迎角从0°拉起到5°,进行闭环PID控制数值模拟。计算Ma=0.6,图5是迎角时间历程和舵偏角时间历程,虽然上升时间很快,但是超调量超过了50%,且振荡严重。
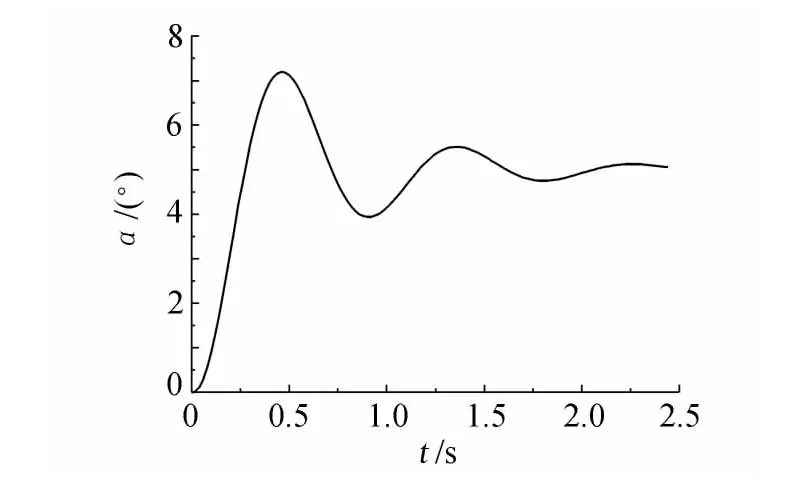
图5 PID控制CFD模拟结果Fig.5 CFD Simulation Result of PID Control
3 控制参数优化
在经典控制理论中,很多情况下由理论设计的控制参数并不最优,为了寻求更好的控制效果,往往要不断调整参数,并通过试验确定。对导弹来说,通常由试飞来检验控制系统,这是昂贵、费时和危险的方法[7,16]。数值模拟技术则不存在这些问题。针对超调量过大、振荡剧烈的问题,通过数值模拟对参数进行优化改进。根据PID三个参数对动态响应的影响特性,依次设计了6组参数,分别如下:
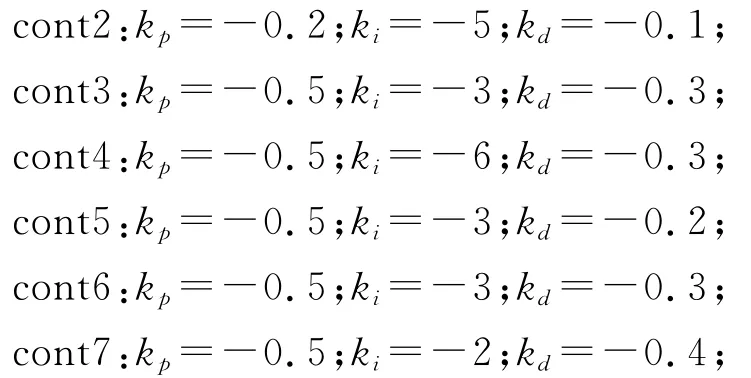
模拟结果如图6,动态性能指标[17]列于表1。从结果看,cont1的超调量最大,但是它的前3个时间指标都较好。cont5的超调量最小,调节时间也最短,只有1.18s,优于cont1的1.7s,上升时间0.34s,满足导弹动态响应指标要求。从迎角曲线看出,在经历第一次超调后,没有发生振荡,直接稳定到了5°,最终配平舵偏角-2.37°。总的来看,cont5具有不错的动态性能。cont5的俯仰力矩时间历程(图7)也表明力矩趋于0。

图6 迎角时间历程比较Fig.6 Compare of time history for angle of attack
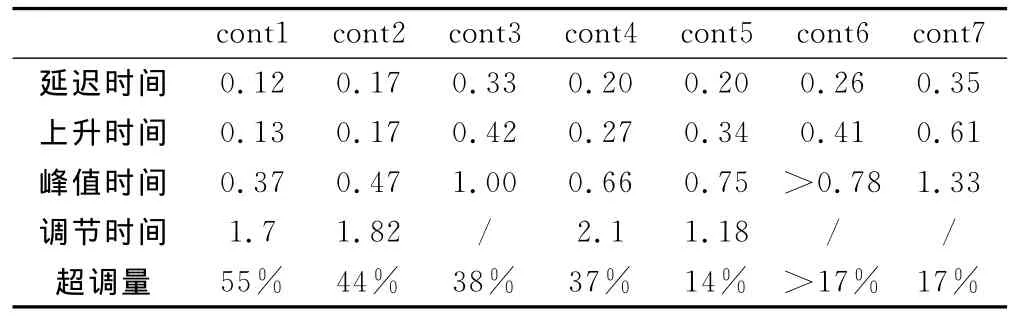
表1 各控制器动态性能指标Table1 Dynamic performance for each aontroller
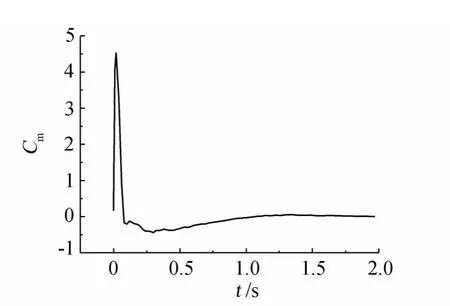
图7 控制器5俯仰力矩系数时间历程Fig.7 Time history of pitching moment coefficient for controller 5
图8是使用cont5参数进行阶跃响应的仿真结果,以及在图6中cont5舵偏控制下的响应仿真结果,它们与数值模拟迎角曲线都有较大差异。图6清晰地表明舵偏角在控制初段迅速变化,最大角速度达到了200°/s。图2所示开环算例的舵偏角速度只有6.7°/s,是准静态问题,所以仿真结果与CFD计算结果吻合较好。而当实际控制时,很大的舵偏速度引入了更强的非定常效应,此时简化数学模型便不能精确描述这些过程,从而导致了仿真结果与模拟结果的差异。

图8 单位阶跃和受控响应(cont5)Fig.8 Step and control responses of PID controller 5
4 结 论
(1)使用双时间步三阶Adams预估校正法耦合空气动力学/飞行力学计算,模拟了纵向开环虚拟飞行,与试验和仿真结果一致性较好,表明计算方法可以用于此条件下气动/运动/控制一体化数值模拟;
(2)通过对导弹配平飞行数值模拟,检验和改进了PID参数,超调量从超过50%降低到14%,调节时间从1.7s降低到1.18s,上升时间0.34s,满足动态性能要求;
(3)要使仿真结果更准确、可靠,必须在数学模型中充分考虑各种非定常效应,并对控制律进行仔细设计,这往往是比较困难的;
4 发展的虚拟飞行数值模拟技术能反映动态过程,是检验和优化控制方法的有效途径,具有应用潜力。
[1]STEVENS B L,LEWIS F L.Aircraft simulation and control[M].John Wiley and Sons Inc,1992.
[2]YANG J,ZHANG X F,YUAN B,et al.Missile control theory[M].Beijing:National Defense Industry Press,2008.(in Chinese)杨军,张晓峰,袁博,等.导弹控制原理[M].北京:国防工业出版社,2008
[3]ALLWINE D A,STRAHLER J A,LAWRENCE D A,et al.Nonlinear modeling of unsteady aerodynamics at high angle of attack[R].AIAA 2004-5275
[4]PHILLIPS W H.Flying qualities from early airplanes to the space shuttle[R].AIAA 88-0751,1988
[5]TAO Yang,FAN Zhaolin,WU Jifei.CFD based virtual flight simulation of square cross-section missile with control in longitudinal flight[J].Chinese Journal of Theoretical and Applied Mechanics,2010(2):169-176.(in Chinese)陶洋,范召林,吴继飞.基于CFD的方形截面导弹纵向虚拟飞行模拟[J].力学学报,2010(2):169-176.
[6]ALLAN M R,BADCOCK K J,RICHARDS B E.CFD simulation of longitudinal flight mechanics with control[R].AIAA 2005-46
[7]SALAS M D.Digital flight:the last CFD aeronautical grand challenge[J].Journal of Scientific Computing,2006,28(213):479-505.
[8]HALL L H,PARTHASARATHY V.Validation of an automated chimera 6-dof methodology for multiple mov-ing body problems R.AIAA Paper 9816574
[9]NICHOLS R H,DENNY A G.Numerical simulation of a store in controlled separation[R].AIAA9933437
[10]HALL L H,MITCHELL C R,PARTHASARATHY V.An unsteady simulation technique for missile guidance and control applications[R].AIAA Paper 9715666
[11]SAHU J.Coupled CFD and rigid body dynamics modeling of a spinning body with flow control[R].AIAA-2004-2317,2004
[12]SØRENSEN K A,TREMEL U,RIEGER H,et al.Simulation of manoeuvring aircraft with the unstructured chimera approach[R].AIAA-2007-123
[13]DA X Y,TAO Y,ZHAO Z L.Research on virtual flight simulation based on prediction-correction coupling method and chimera grid[J].Acta Aeronautica et Astronautica Sinica,2012,33(6):977-983(in chinese)达兴亚,陶洋,赵忠良.基于预估校正和嵌套网格的虚拟飞行数值模拟[J].航空学报,2012,33(6):977-983.
[14]TAO Y,YUAN X X,FAN Z L,et al.Numerical investigation of dynamic behavior of square section missile in roll at high incidence[J].ACTA Aerodynamica Sinica,2010,28(3):285-290(in chinese)陶洋,袁先旭,范召林,等.方形截面导弹摇滚特性数值研究[J].空气动力学学报,2010,28(3):285-290.
[15]DA X Y,TAO Y,ZHAO Z L.Virtual flight Navier-Stokes solver and its application[J].Procedia Engineering,2012,31:75-79.
[16]LAWRENCE F C,MILLS H.Status update of the AEDC wind tunnel virtual flight testing development program[R].AIAA Paper 2002-0168,2002
[17]HU S S.Automatic control theory[M].Beijing:Science Press,2007.(in Chinese)胡寿松.自动控制原理[M].北京:科学出版社,2007.
