云背景下红外小目标检测的分形方法
2014-03-29郭同健高慧斌宋立维
郭同健,高慧斌,宋立维,余 毅
(中国科学院长春光学精密机械与物理研究所,吉林 长春130033)
1 引言
红外小目标是指在红外成像焦平面上占据像元数目较少的目标,这类目标缺乏形状、结构信息,并且可接收红外辐射强度较弱,大多数情形下还伴随强烈的云层背景辐射,使得目标信杂比极低。为此,前人开展了大量工作,通过挖掘云背景与小目标之间的一些特征差异,提出了许多云背景红外小目标的检测方法,如:高通滤波[1]、改进灰度阈值识别[2]、匹配滤波[3]、最大中值滤波[4]、多步长梯度检测[5]等。在实际应用中,上述小目标检测方法具有一定效果,但是由于忽略了云层背景空间非平稳随机分布特性,使得对强起伏云背景下小目标检测效果不理想,因此,有必要研究一种适应性强的云背景红外小目标检测方法。
Pentland[6]研究表明:云层、海浪、起伏的山峦等大多数自然景物所映射的图像具有分形特性,且在一定尺度范围内满足分数布朗随机场模型。该理论的提出为非平稳分布的云背景描述建立了定量数学模型,并为分形方法应用于自然背景的目标检测提供了依据。从近年研究成果[7]来看,分形方法已经在复杂背景的舰船目标检测中得到运用,但是大多数是基于分维数的概念来区分自然背景与人造目标,这要求目标具有明显的结构或形状信息,显然难以适用于小目标检测。为此,本文利用分数布朗随机场模型,研究实际云背景图像中小目标存在引起背景分形特征变化的规律,在此基础上提出基于分形曲线面积差量的小目标检测方法,并通过实验对比验证了该方法的有效性及对不同起伏程度的云层背景适应能力。
2 云背景分形特性及小目标影响分析
2.1 分数布朗随机场模型
分形中常用数学模型是分数布朗运动,设随机场F(x),对定义域内所有x,Δx满足条件:

称F(x)为分数布朗随机场;Pr(·)表示概率测度;H为Hurst指数且表示范数;G(z)为零均值高斯随机变量分布函数。由式(1)可得:

其中,D(Δx)=E[|F(x+Δx)-F(x)|],d=E[|F(x+1)-F(x)|]。可以看出:单位矢量1确定时,随着尺度变化可得一系列测度值D(Δx),它们组成的数据点集在尺度-测度双对数坐标系下构成了分形曲线,该曲线满足直线线性关系,直线斜率由H决定。
对于符合分数布朗随机场模型的图像区域Ω,x表示像素点坐标位置;F(x)表示灰度值;单位矢量1决定分形方向,这里研究图像水平和垂直方向的综合分形特性,1取值(1,0)和(0,1),对应Δx取值(Δx,0)和(0,Δx)。计算时统计平均用算术平均估计。
2.2 云层背景分形特性
选择中波红外云层图像来分析云层背景分形特性,如图1(a)所示,图像尺寸240×320,像素深度256级。使用15×15窗口在云层内部、净空及云层边缘区域各随机抽取5组窗口数据,并根据分数布朗随机场模型计算数据点集得到对应关系如图1(b)~(d)所示。
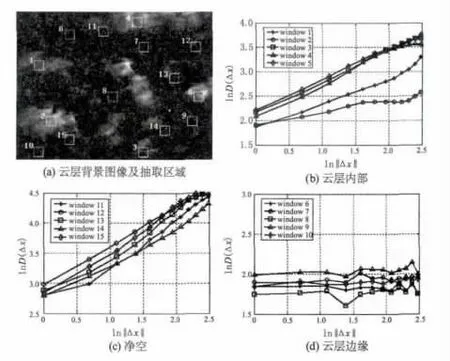
图1 云层背景分形曲线
可以发现,对于云层内部、云层边缘区域,分形曲线在[1,5]尺度区间具有线性特性,且0<H<1,这表明云层背景图像的统计特性在小尺度范围内符合分数布朗随机场模型;对于净空区域,分形曲线在整个尺度区间具有线性特性,但H≈0。
2.3 小目标存在影响分析
在云层背景条件下,通过模拟一个点圆状的小目标,分析小目标存在对背景分形特性的影响。根据光学系统成像原理,小目标成像过程可表示为:

其中,I(x,y)表示目标像光强分布;I0(x,y)表示目标像理想光强分布;h(x,y)表示成像系统点扩散函数,通常采用高斯函数近似,即:

其中,R为扩散函数作用域半径;σ为标准差;k为归一化系数。这里取由此得到小目标
模拟图像如图2(a)所示。将模拟小目标叠加到图1的窗口区域中心位置,计算其分形特性,并对比小目标存在与不存在时分形曲线如图2(b)~(d)所示。可以看出,当小目标出现在云层内部或边缘区域时,小尺度区间的Hurst指数基本不变,只有小目标出现在净空区域时,Hurst指数才会发生变化,因此,只依据Hurst指数或分维数难以检测出云层背景下小目标。不过,从图中也注意到,不管是在云层内部、边缘还是净空区域,小目标存在均会导致分形曲线在整个尺度区间内面积发生明显变化,因此可以依据分形曲线面积的差异进行小目标检测。
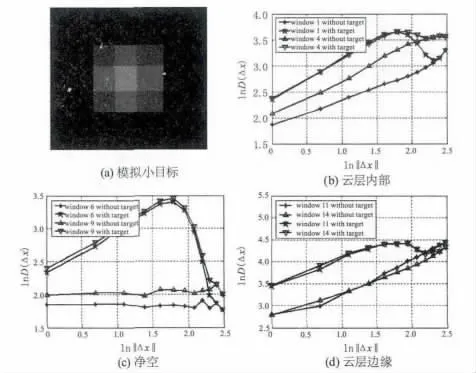
图2 小目标存在与不存在分形对比曲线
3 基于分形曲线面积差量小目标检测
3.1 双窗口度量
云层背景存在小目标会使分形曲线面积发生变化,但该变化量无法直接计算得到。这里采用双窗口度量方法进行估计,其中内窗口X作为目标待测区域,以X为中心再设置外窗口Y,显然,相对于X而言,Y-X即为背景。如果X也是背景,则Y-X与Y区域分形曲线面积差量近似为0;反之,如果X为目标,则Y-X与Y区域的分形曲线面积差量较大。实际中,由于构成分形曲线的尺度-测度数据点对有限,因此分形曲线面积采用梯形法估计。特别地,当Y-X和Y区域尺度集相同时,其分形曲线面积差量ΔS为:

3.2 小目标检测
利用双窗口度量,构造基于分形曲线面积差量的小目标检测方法,其主要步骤为:
1)根据目标尺寸先验信息,设置双窗口尺寸大小。
2)计算图像分形曲线面积差量。从图像左上角开始,沿水平、垂直方向以步长N滑动双窗口,并按上述双窗口度量方法计算分形曲线面积差量ΔS,将该值作为窗口中心处N×N图像子块的分形曲线面积差量;
3)根据图像的分形曲线面积差量,选取适当阈值对图像二值化分割,检测出目标区域。这里采用双阈值比较选取方法,即T=max{T1,T2}:

式中,m为图像分形曲线面积差量的均值;σ为图像分形曲线面积差量的方差;ΔSmax为图像分形曲线面积差量最大值;k1取值3~10,k2取值0.8~1.0。
4 实验结果与分析
为了验证方法适用性,选取中波红外成像系统拍摄的云背景下单个小目标图像作为实验数据进行分析,其中三幅典型图像如图3(a)~(c)所示,分别对应弱起伏、中等起伏和强起伏云背景,图像尺寸均为240×320,像素深度为256级。目标经过人眼准确识别后其位置区域被手动标注在图像中。
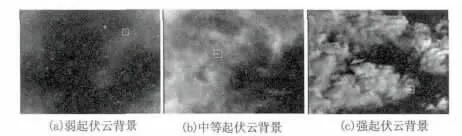
图3 云背景下小目标图像
依据红外成像系统及目标特点,确定目标发现时最大尺寸不大于6×6像素,设置双窗口的内、外窗口尺寸为6×6和18×18,滑动步长为2,利用上述双窗口度量方法,计算实验图像的分形曲线面积差量,其中三幅典型图像的分形曲线面积差量分布形状如图4(a)~(c)所示。
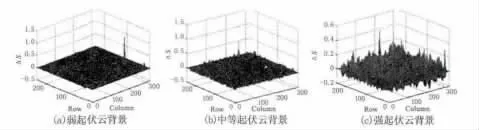
图4 典型图像的分形曲线面积差量分布形状
可以看出,在三幅典型图像分形曲线面积差量分布形状图中,目标区域的分形曲线面积差量均具有明显突出特征。利用双阈值比较选取分割阈值,其中k1取值为5,k2取值为0.9,得到这三幅典型图像二值化分割后的目标检测结果如图5(a)~(c)所示,目标区域均被有效地检测出来,在弱起伏和中等起伏背景下无虚警目标,而在强起伏背景下只存在一个虚警目标。

图5 典型图像的目标检测结果
为了进一步比较本文分形方法(标记为FSD)相对于其他方法的目标检测效果,选择高通滤波(标记为HF,选取7×7高斯高通滤波模板)、最大中值滤波(标记为MMF,选取滤波窗口为7×7)、多步长梯度检测(标记为MSG,选取步长为6)这三种典型算法进行对比分析,并采用ROC曲线来评价各种算法检测性能。用于性能评价的样本图像库通过在实际云背景图像中嵌入模拟小目标进行构造。实验选取弱起伏、中等起伏和强起伏三组云背景图像,其中每组包含5帧图像,如图6所示。

图6 实际云背景图像
对于每帧图像,按二维均匀分布随机选取20个坐标位置嵌入模拟小目标,小目标按式(3)、(4)方法进行模拟,其中h(x,y)参数与上述相同,I0(x,y)=80,-1≤x,y≤1。这样每组云背景图像生成一个包含100帧图像的样本图像库,分别对应弱起伏云背景、中等起伏云背景和强起伏云背景,利用每种算法进行运算得到一系列残差图像,对残差图像采用相同阈值选择方法进行二值化分割,统计分割后图像中正确目标和虚假目标个数并计算目标检测概率及虚警概率。为了提高运算速度及减少统计误差,按照区域概念进行统计,即将整幅残差图像划分成一系列8×8图像区域,并假定该区域内不会有一个以上目标,只要区域中某像素的残差大于阈值,就认为该区域存在一个目标,不再对区域内的其他像素进行统计。根据目标检测概率及虚警概率的计算结果,得到各种算法的ROC曲线如图7所示。可以看出,在四种对比算法中,高通滤波不管在何种云背景下其目标检测效果都是最差;而其他三种算法在弱起伏云背景下目标检测效果相当,但在中等起伏和强起伏云背景下,分形方法则明显优于其他方法,在强起伏背景、虚警率为10-3时,相比最大中值滤波、多步长梯度检测只有0.2的目标检测概率,分形方法的目标检测概率达到0.6,表明该方法具有很好的背景适应能力。

图7 样本图像库ROC曲线
5 结论
通过对实际云背景的分形特性研究发现,小目标存在对背景分维数影响较小,但对分形曲线面积影响明显,根据该规律,利用双窗口度量构造了基于分形曲线面积差量的小目标检测方法。从实验结果可以看出,分形方法能够准确检测出不同起伏云背景下的红外小目标,相比高通滤波、最大中值滤波、多步长梯度这些代表性的小目标检测方法,分形方法具有更好的检测效果和背景适应能力。但是,该方法也具有较大的运算量,需要今后进一步研究有效的快速算法。
[1] Gonzalez R C,Woods R E.Digital image processing[M].Ruan QQ,Ruan Y Z,Transl.Beijing:Publishing House of Electronics Industry,2003.137-147.(in Chinese)冈萨雷斯,伍兹.数字图像处理[M].阮秋琦,阮宇智译.北京:电子工业出版社,2003.137-147.
[2] ZHANG Shuzhen.Image threshold segmentation algorithm for infrared small target detection[J].Laser&Infrared,2013,43(10):1171-1174.(in Chinese)张书真.一种检测红外小目标的图像阈值分割算法[J].激光与红外,2013,43(10):1171-1174.
[3] Genin L,Champagnat F,Besnerais G L.Single frame IR point target detection based on a Gaussian mixture model classification[J].Proc.of SPIE,2012,8541:854111.
[4] Deshpande SD,ER M H,Ronda V,et al.Max-Mean and Max-Median filters for detection of small targets[C].SPIE,1999,3809:74-83.
[5] WAN Ming,ZHANG Feng-ming,HU Shuang.Novel infrared dim and small target detection algorithm based on multi-scale gradient[J].Acta Optica Sinica,2011,31(10):1011001.(in Chinese)万明,张凤鸣,胡双.基于多步长梯度特征的红外弱小目标检测算法[J].光学学报,2011,31(10):1011001.
[6] Pentland A P.Fractal-based description of natural scenes[J].IEEE Trans.on Pattern Analysis and Machine Intelligence,1984,PAMI-6(6):661-674.
[7] ZHANG Dongxiao,HE Sihua,YANG Shaoqing.Ship targets detection method based on multi-scale fractal feature[J].Laser&Infrared,2009,39(3):315-318.(in Chinese)张东晓,何四华,杨绍清.一种多尺度分形的舰船目标检测方法[J].激光与红外,2009,39(3):315-318.
