磁瓦表面缺陷机器视觉检测与识别方法
2014-03-28杜柳青余永维
杜柳青, 余永维
(重庆理工大学机械工程学院,重庆 400054)
磁瓦作为电机的重要组成部件,其表面缺陷会直接影响电机的性能和寿命。由于缺乏有效的检测技术,目前磁瓦生产企业只能采取人工目视全检的方式,其效率低、不可靠。用机器视觉进行产品缺陷无损检测具有非接触、速度快、精度高等优点,是当前国内外研究的热点,并在实际中逐渐得到应用[1-4]。由于磁瓦类型多、表面区域多,有磨痕纹理,以及缺陷的多样性、复杂性,有裂纹、杂质、崩块、欠磨、起级、污渍等,磁瓦缺陷视觉检测有较大难度。用现有传统方法(如各种阈值方法、区域分割法等)对磁瓦表面缺陷进行检测与提取,存在以下不足[5-8]:①算法适应性不强,由于整体亮度不均匀,误判率高;②算法缺乏通用性,大多数方法都是针对特定缺陷,而不能检测各种类型的缺陷和各种表面的缺陷;③光源复杂,不同的表面、不同的缺陷需不同的光照形式;④大多处理时间长,不适宜在线使用。
对此,本文提出一种基于支持向量机的磁瓦表面缺陷视觉检测与识别方法,针对磁瓦表面缺陷种类多、对比度低、图像中存在磨痕纹理背景和整体的亮度不均匀等特点,定义扫描线梯度,提出基于两类支持向量机图像分割方法对缺陷进行快速判别和提取;然后提出一种改进的多类支持向量机方法,对缺陷进行分类识别,实验结果表明,该检测与识别方法有较高的准确性和有效性。
1 基于两类支持向量机的磁瓦缺陷检测与提取
磁瓦的弧面、左右倒角面以及上下倒角面上光照很不均匀,对比度低且有磨痕纹理干扰。因此,难以通过调整光源角度来使各个面的照度均匀,且缺陷种类较多,各缺陷灰度性质也不一样,阈值等传统方法很难进行各种缺陷的判别及准确提取,图1为某类型磁瓦的表面。本文针对弧面及各倒角面相互之间的灰度值差别较大,其上的磨痕方向也不一样,分成5个区域即弧面和4个倒角面,提出基于支持向量机的分区域逐行扫描缺陷判别与提取方法。在逐行扫描中,用两类支持向量机实时判别扫描行是否为缺陷行。如是,则用自适应梯度阈值法快速提取该行缺陷。

图1 磁瓦表面及光照
1.1 支持向量机分割原理
支持向量机是根据统计学理论提出的一种机器学习方法,其主要思想是对线性不可分的两类问题,构造一个分类间隔最大的分类超平面,使各类中与分类超平面距离最近的样本之间的距离最大。对于样本非线性可分情况,其基本原理是将样本的输入向量经非线性变换映射到一个高维空间,并在这个高维空间中构造最优分类超平面[9-10]。
其最优化问题的对偶形式可以用如下方法描述:给定训练样本(xi,di)(其中,i=1,2,…N),xi为输入特征,di∈{-1,+1}为分类输出结果。在约束条件下求解最大化目标函数的Langrange乘子{ai},得到最优分类函数。
最大化目标函数:

其中,k(x,xi)为核函数,满足mercer定理。
约束条件:

其中,c∈R,为惩罚参数。
最优分类函数:

其中,b为分类阈值。
支持向量机分类方法是基于二次寻优问题,得到是全局最优解,避免了神经网络易陷入局部极值的问题,并通过非线性变换和函数解决了高维数问题,加速了训练学习速度。
1.2 特征选取及缺陷提取
采用支持向量机分类时,缺陷特征的正确选取和描述是基础,针对磁瓦扫描线的特点,定义扫描线梯度标准差与灰度标准差组成特征矢量。
扫描线梯度标准方差S的定义:
如图2,灰度扫描线各局部极小灰度值点h(xi,yj),i=1,2,…,n,n为极小灰度值点的数量;各极小灰度值点对应的像素坐标为(xi,yj),i=1,2,…,n。

图2 扫描线灰度
各极小点左右两侧离其最近的顶部,分别为h(xiL,yj)和h(xiR,yj),i=1,2,…,n;各顶部对应的像素点,分别为(xiL,yj)和(xiR,yj),i=1,2,…,n。
极小值点区域N(xi,yj):N(xi,yj)=由左右两侧离极小值点最近的顶部之间的像素组成。
定义各极小值点区域的梯度值Δh:Δh(xiL,yj)=h(xiL,yj)-h(xi,yj),Δh(xiR,yj)=h(xiR,yj)-h(xi,yj),其中i=1,2,…,n;取Δh(xiL,yj)和Δh(xiR,yj)的较小者为极小值点区域的梯度值Δh。各Δh的标准差即为该扫描线的梯度标准差。
扫描线灰度标准方差S的定义:

f(x)表示扫描行图像,E[f(x)]是灰度数学期望。扫描线灰度标准差S来衡量扫描线上各灰度的变异程度,克服了不同扫描线上亮度变化的影响。
如扫描线上有缺陷,该扫描线的梯度标准差Δh和扫描线灰度标准方差S会发生较大变化,也即缺陷行扫描线与无缺陷行扫描线的Δh和S有较大的区分度。并且不同类型缺陷的扫描线形状、Δh和S也各不相同(在实验分析图表中也能明显显示出,这与理论分析相符)。因此,Δh和S能作为缺陷分割和识别的特征向量。
对支持向量机判别为缺陷行的扫描线,定义自适应梯度阈值T:T=σΔh+kμΔh,其中k为常系数,一般取3~5。梯度值大于阈值的极小值点区域即为缺陷区域。
2 基于多类支持向量机的磁瓦缺陷分类识别
支持向量机方法是针对两类分类问题提出,为实现裂纹、崩块、杂质、起级、欠磨和污渍6类磁瓦缺陷的分类识别,须建立多类支持向量机。常用的多类支持向量机方法有一对多方法,一对一方法和有向无环图方法等,但前两者存在不可分区域,后者存在分类不确定性。一对多方法具有分类器较少,测试时间较短的优点,本文用改进的一对多法多类支持向量机对磁瓦表面缺陷图像进行分类,并提出最小距离法解决其不可分区域问题。
一对多法对K类问题构造K个两类分类器,训练第m类分类器时,将第m类中的样本作为正样本,而将其他所有非m类样本作为负样本。对不可分区域的输入向量,本文提出以其到各分类超平面的距离作为分类准则,根据最小距离识别其所属类别,改进的一对多法原理如图3所示。

图3 改进的一对多法多类支持向量机算法
不可分区域的输入向量到各分类超平面的距离为:

求最小距离minDi(x)所对应的分类超平面:

决策函数为:

其中,φ(x)=(φ1(x),φ2(x),…φn(x),…),为非线性映射,其将输入空间映射到高维特征空间F。
在6类训练磁瓦缺陷样本中构造6个两类分类器。对某一测试样本,依次用每个分类器对其进行分类,并记录其所属的类,直至遍历所有分类器为止,得票最多的类即为该样本所属的类。
结合大量实验,除选择缺陷中心行扫描线的梯度标准差Δh和扫描线灰度标准方差S作为特征外,另确定重心、面积、细长度3个几何特征及7个不变矩特征,共10个特征向量组成特征矢量来描述磁瓦表面缺陷特征,作为多类支持向量机的输入矢量。
3 实验及结果分析
对图4所示含有缺陷的磁瓦表面图像进行分区域的逐行扫描。含缺陷的扫描线灰度如图5所示。以裂纹图像为例,由线梯度和灰度标准差构成的部分含裂纹行和无缺陷行的特征向量如表1所示,然后对特征向量做归一化处理。

图4 表面缺陷:裂纹、崩块、起级、杂质、欠磨和污渍

图5 含缺陷的扫描线

表1 扫描行特征向量
核函数参数的选择直接影响分类效果,这里采取交叉实验方法,采用径向基核函数,不同核参数和不同惩罚参数下分析其分类效果,当核函数参数σ2=1、惩罚参数c=1000时,泛化误差最小,为5.6%。对两类支持向量机训练后,取一定数量的测试样本,检测结果如表2。
目前,磁瓦表面缺陷检出的其他方法中,文献[5]提出的自适应形态学滤波的提取方法效果较好。本文方法与文献[5]方法的对比数据如表3所示,从表3可知,本文方法总的正确率优于文献[5]方法,且误检率和漏检率较一致,说明适应性较强。

表2 不同表面的检测结果

表3 本文方法与文献[5]方法的对比
计算缺陷行所对应自适应梯度阈值,搜索梯度值大于阈值的极小值点区域即缺陷区域。
图6为用该方法对图3所示缺陷进行提取,提出裂纹、崩块、起级、杂质、欠磨和污渍缺陷的二值图像。

图6 提取出的表面缺陷:裂纹、崩块、起级、杂质、欠磨和污渍
通过上述支持向量机图像分割方法采集磁瓦缺陷样本共592个,取其中350个作为训练样本对核函数参数σ2=1、惩罚参数c=1000的改进多类支持向量机进行训练。然后用训练后的该一对多法多类支持向量机对用其余242个样本进行测试,作为测试样本的磁瓦表面缺陷图像分类识别结果如表4所示。
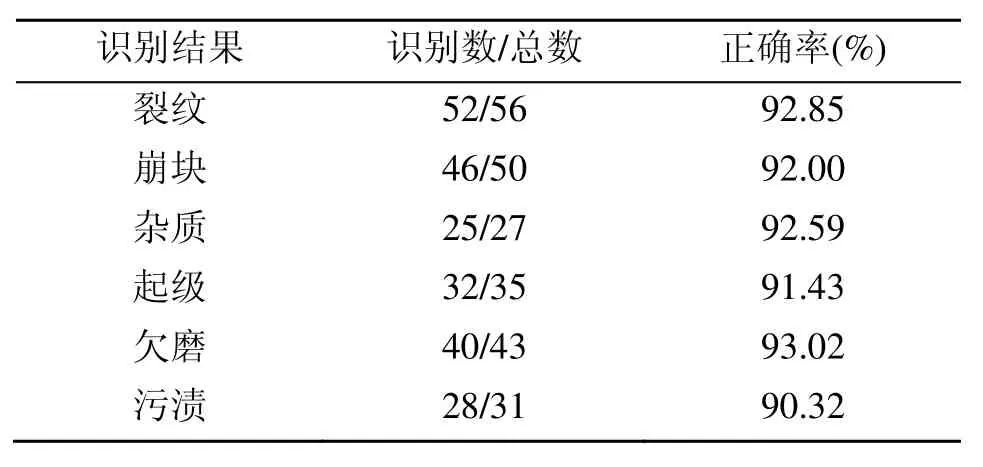
表4 各种表面缺陷识别结果
在亮度变化比较大的情况下,通过对不同表面区域和不同类型的缺陷检出与识别实验可以看出,用本文提出的方法能能获得良好的效果,检出率可达到96%,选取合适的支持向量机惩罚参数和核参数,识别率超过91%,检出及识别各类缺陷的总时间小于1.5 s。
4 结 论
本文提出的基于支持向量机的分区域逐行扫描缺陷检测与识别方法解决了磁瓦表面缺陷种类多、对比度低、图像中存在磨痕纹理背景和整体亮度不均匀等难点,正确率高、速度较快,且通用性较好、适应性较强,对不同类型磁瓦、不同表面以及不同种类缺陷都能适用。该基于支持向量机的缺陷提取方法不同于现有的传统方法,可为图像分割提供一种新的思路和方法。
[1]Turaga P,Chellappa R,Subrahmanian V S,Udrea O.Machine Recognition of Human Activities: A Survey [J].IEEE Transactions on Circuits and Systems for Video Technology,2008,18(11): 1473-1488.
[2]Kumar A.Computer-vision-based fabric defect detection:A survey [J].IEEE Transactions on Industrial Electronics,2008,55(1): 348-363.
[3]Keser T,Hocenski Z,Hocenski V.Intelligent Machine Vision System for Automated Quality Control in Ceramic Tiles Industry [J].Strojarstvo,2010,52(2): 105-114.
[4]Brosnan T,Sun D W.Improving quality inspection of food products by computer vision - a review [J].Journal of Food Engineering,2004,64(1): 3-16.
[5]余永维,殷国富,蒋红海,黄 强.磁瓦表面图像的自适应形态学滤波缺陷提取方法[J].计算机辅助设计与图形学报,2012,24(3): 351-356.
[6]严俊龙,郑晓曦,李铁源.磁瓦表面缺陷自动检测系统的研究[J].计算机工程与应用,2009,45(36):228-231.
[7]蔡 鹏,尹宝才,孙德慧.基于最近离散点的光线跟踪[J].图学学报,2013,34(3): 1-6.
[8]郭 洪,张清志.增强图像细节和去噪能力的改进形态学分水岭算法[J].图学学报,2013,34(3): 7-11.
[9]Hsu C W,Lin C J.A comparison of methods for multiclass support vector machines [J].IEEE Transactions on Neural Networks,2002,13(2): 415-425.
[10]Suykens J A K,Vandewalle J.Least squares support vector machine classifiers [J].Neural Processing Letters,1999,9(3): 293-300.