以前照方式进行LAMOST光纤位置检测的光点提取研究*
2014-03-27刘志刚吴俊丰刘力力刘永梅严红红
刘志刚,吴俊丰,刘力力,刘永梅,严红红
(中国科学技术大学精密机械与精密仪器系,安徽合肥 230027)
0 引言
LAMOST共有4000个光纤定位单元,当前使用的光纤定位单元位置检测为背照方式检测[1],即光纤所接光谱仪一端由白光照明,在黑暗条件下,使用CCD拍摄焦面板的光纤端面射出的光斑,以光重心法计算光纤端部的中心位置,继而通过计算得到光纤定位单元的定位参数,从而对光纤定位单元进行误差补偿。
背照法的优势在于,拍摄所得图像光纤端面射出的光斑与背景区别大,几乎不会出现灰度值近似的干扰点,易于提取亮点获得位置,计算流程较为简单。
然而背照法在检测过程中望远镜无法正常观测,不利于实时校准的实现。为了使单元的闭环控制[2]成为可能,LAMOST希望实现光纤定位单元的实时校准。在研究过程中发现,以前照法代替背照法进行单元位置的检测是一套十分可行的方案。
前照法作为一种新型的检测方式,相比背照法不仅更加简便高效,而且能够满足今后LAMOST闭环控制的需要。所谓前照方式检测,就是用前照灯直接照射光纤焦面,然后直接使用CCD拍摄,从而提取光纤位置的检测方法。前照法检测光纤位置时,不需要从光谱仪端额外添加光照,前照灯开启即可检测光纤位置,前照灯关闭LAMOST就可以直接进行观测,不仅在很大程度上提高了检测效率,又同为闭环检测提供了前提,图1为两种检测方式示意图。
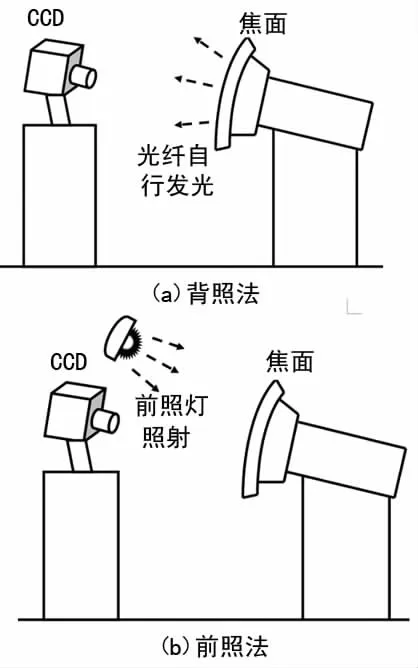
图1 两种检测方式示意图
笔者以实验为基础,介绍前照方式检测LAMOST光纤位置中光斑提取的方法,对前照法的可行性进行论证,为今后可能以前照法代替背照法进行光纤位置检测提供理论依据。
1 前照法检测光纤位置
1.1 亮点阈值的选取
使用迭代法计算背景阈值[3]T。迭代法是基于逼近的思想,先给定一个初始背景值T0,从而根据背景值划分前景和背景,分别计算两者的平均灰度FB和FS,令新背景值Tn=(FSn-1+FBn-1)/2。如此迭代,当得到的背景值与上一次背景值之差的绝对值小于收敛精度时,迭代结束,Tn即为背景灰度值。
前照法采用前照灯照射焦面继而拍摄的方法进行图像采集,使得图片中不可避免的出现了众多干扰光斑。部分干扰光斑的大小、形状、灰度值与目标光斑(即光纤端面反射光斑)相差无几,导致干扰光斑与目标光斑很难单纯以背景值区分,所以不妨设定一个亮点阈值L=T×2,将灰度值超过L的光斑都作为亮点进行提取。这样能够把目标光斑尽可能一个不漏的提取之后,再以其他限制条件区分干扰光斑与目标光斑。
1.2 光斑位置的确定
改进后的8点联通法[3]:
(1)按顺序检测图像[4]中的每一个像素点,若点g的灰度值大于亮点阈值L,则以点g为中心,依次检测g周围的8个像素点,找出灰度值大于点g的灰度值的点(g1,g2,g3…),记录下位置与灰度值。
(2)对于过程(1)中所记录的每个像素点(g1,g2,g3…),找到其周围灰度值大于自身灰度值的点,记录下位置和灰度值。
(3)重复过程(2),直到找不到灰度值大于自身灰度值的点为止,将以上所记录的像素点作为集合G。
(4)找到G中灰度值最大的点p,以该点为起点,找出p周围8个点中灰度值小于点p的灰度值而又大于亮点阈值L的点(p1,p2,p3…),记录下位置与灰度值。
3)压水试验。灌前物探测试孔、灌后质量检查孔均进行“单点法”压水试验,其他灌浆孔进行“简易压水”试验。
(5)对于过程(4)中所记录的每个像素点(p1,p2,p3…),找到其周围灰度值小于自身灰度值而又大于亮点阈值L的点,记录下位置和灰度值。
(6)重复过程(5),直到找不到灰度值小于自身灰度值而又大于亮点阈值L的点为止,将以上所有记录了位置和灰度值得像素点作为集合P,以P作为一个光斑。
(7)重复过程(1)~(6),直至整幅图像检测完毕。
通过改进的8点联通法来获取图像的光斑信息与原矩形法[5]相比,虽然增大了运算量,但是在运算速度没有显著下降的前提下,避免了将若干光斑记录为一个的情况,提高了光斑提取的准确度。
设光斑的图像灰度表示为f(x,y),其中:
x=1,…,m,y=1,…,n。将其阈值化为:

T为背景阈值。再由光重心法计算光斑坐标,表示为:
提取好的光斑经过光重心法计算后,可得到每个光斑的坐标。至此光斑的位置得以确定。
1.3 目标光斑与干扰光斑的区分
将之前提取好光斑图像进行二值化转变,将所有光斑中的每一个像素的灰度值赋255,其余像素的灰度值赋0。依据形状与面积等约束,尽可能多的剔除干扰光斑。
面积约束:检测每个光斑中包含像素的个数,将像素数量小于200,大于9的光斑保留下来,其余光斑中所有像素灰度值赋0。
形状特征约束:对于每个光斑,提取圆形度、形状因子、凸性率[6]、偏心率作为特征参数。圆形度R0用来识别光斑边界的复杂程度;形状因子F根据光斑周长P和光斑面积A计算出来,在一定程度上描述了光斑的紧凑性;凸性率Av通过光斑凸性面积即形状轮廓外接圆的面积和光斑实际面积比得出,可以对光斑边界不平整和不规则度进行测量;偏心率Et也称之为伸长度,为光斑的最大Feret直径和最小Feret直径之比,一定程度上描述了光斑轮廓。4个特征参数的计算公式如下:
式中:Ac为光斑最小外接圆面积;max FD为光斑的最大Feret[7]直径;min FD为光斑的最小Feret直径。
因为干扰光斑众多且形状各异,这里用3σ做标准,然后采用迭代的方法取得背景。
①求出所有光斑圆形度R0的平均值μ和标准差σ,然后剔除大于μ+3σ的光斑;
②求剩余的所有光斑圆形度的平均值μ和标准差σ,然后剔除大于μ+3σ的光斑;
③重复过程②,直到所有光斑的圆形度在μ+3σ之内。
④对于剩余三个特征参数F、Av、Et也做同样的处理。
第二次面积约束:以3σ为标准,用迭代法选出面积在μ+3σ之内光斑。用这种方法能很好地将目标光斑从众多杂点中区分出来。
2 LAMOST现场拍摄图像处理
现场拍摄使用SBIG公司STX-16803型CCD相机,镜头为佳能EF300 mm f/4L IS USM远摄定焦镜头。CCD距焦面19.8 m。黑暗环境下以两盏冷光灯距离焦面5 m处分别从左右照射。其中1张原始图像如图2。
图3为原始图像提取光斑后,由光重心法计算所得的光斑坐标,单位为像素。*为计算所得光斑位置这时图像中共有18 857个坐标点。由图3可看出干扰光斑众多,并不适于直接匹配。
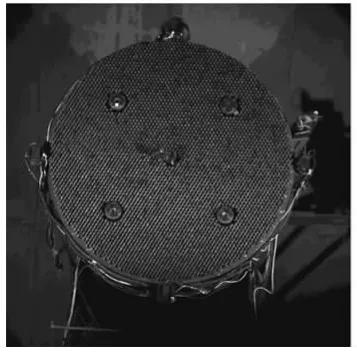
图2 现场拍摄原始图像
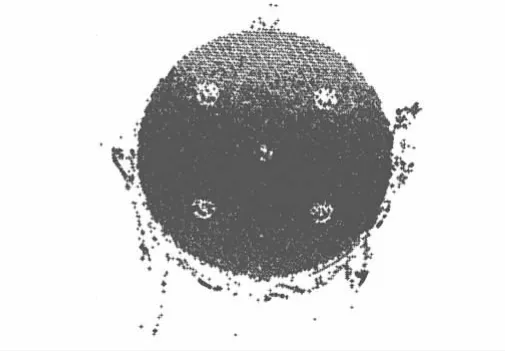
图3 由光重心法计算所得坐标点
图4为计算确定光斑后所得二值图像。图5为第1次面积约束后所剩下的光斑,像素数量范围为9~200的光斑二值图像。
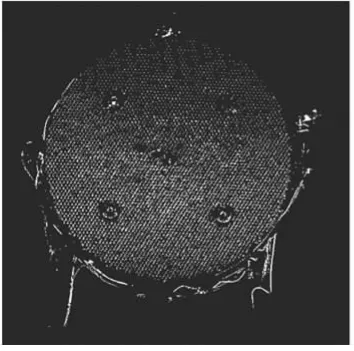
图4 计算获得的光斑二值图
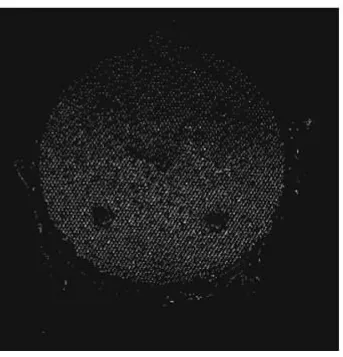
图5 第一次面积约后剩余的光斑
第2次面积约束后,坐标图像如图6。此时还剩余7 356个坐标点。与理论坐标进行匹配,匹配上3 781个坐标点,画出匹配上坐标点与理论坐标点距离的矢量图如图7所示。最终匹配所得的3781个坐标点与理论点距离误差如图8所列。所检出光纤坐标点各个距离区间的数量与比例如表1所列。可看出此次处理前照法的光纤检出率为94.53%,距离误差在1 μm以下的比例为91.87%。
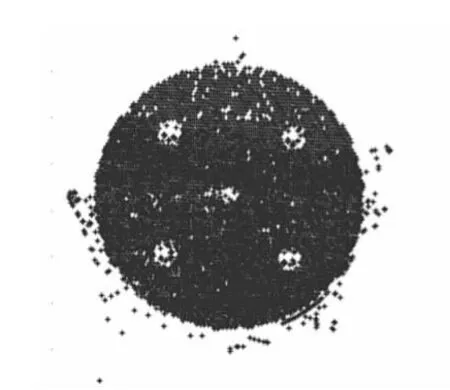
图6 去除干扰光斑后的所有坐标

图7 数匹配后的矢量图
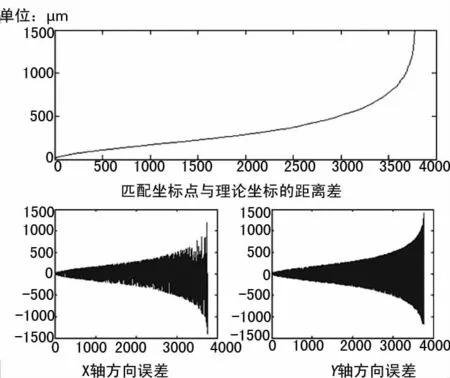
图8 最终获得坐标点与理论点距离误差
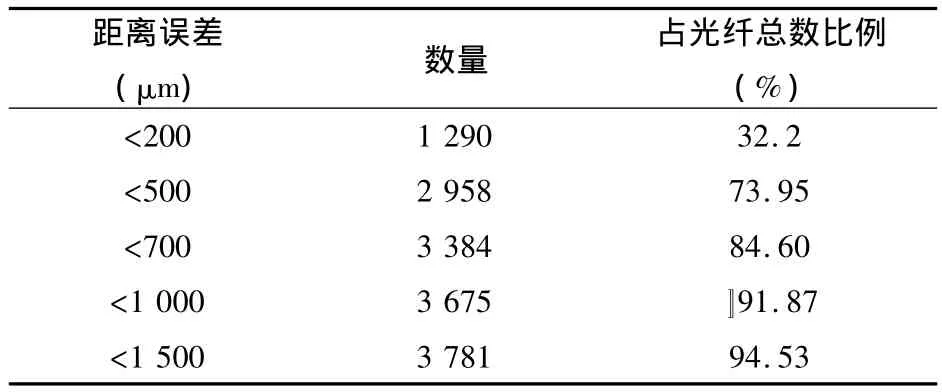
表1 最终检测结果
3 结语
从实际检测角度出发,阐述了前照方式进行LAMOST光纤位置检测的优势,重点介绍了已改进的8点联通法,形状特征约束法等新型检测方法。以实例描述了前照法获得光纤位置的具体流程,以实验数据证明了前照法的可行性。说明前照法作为LAMOST光纤位置检测的新方式,简便高效,且能够满足实时光纤位置提取的需要。
前照法的研究为新型LAMOST光纤位置的检测提供了坚实的理论和实验基础,在后继的检测过程中起到了很好的指导作用。另外,对其它类型特别是目标参杂在众多干扰中的检测也具有重要的参考价值。
[1] 邬林通,刘志刚,胡红专,等.标定方法应用于LAMOST光纤定位单元的饱和测试[J].现代制造工程,2007(9):100-102.
[2] Baldur Eliasson.Modeling and Applications of Silent Discharge Plasmas[J].IEEE Transactions on Plasma Science,1991(2):309-323.
[3] 曾文锋,李树山,王江安.基于仿射变换模型的图像配准中的平移、旋转和缩放[J].红外与激光工程,2001(2):18-20.
[4] 单宝忠,王淑岩,刘颂豪,等.Zernik多项式拟合方法及应用[J].光学精密工程,2002(3):318-323.
[5] 刘志刚,江 晖,谢志林.LAMOST光纤单元定位参数研究[J].光学技术,2010,36(2):239-243.
[6] Xin Cheng,Benny Thornberg,Abdul Waheed Malik,et al.Hardware Centric Machine Vision for High Precision Center of Gravity Calculation[J].World Academy of Science,Engineer and Technology,2010(64):573-574.
[7] Fernández-Soto A,Lanzetta K M,Chen H W,Levine B,Yahata N.Error Analysis of the Photometric Redshift Technique[J].Monthly Notices of the Royal Astronomical Society,2002(4):889-894.
