主动悬架座椅系统的控制及仿真分析*
2014-03-27邓维敏
邓维敏
(重庆交通大学机电与汽车工程学院,重庆 400074)
0 引言
车辆悬架系统性能的好坏对车辆的乘坐舒适性和行驶安全性等性能影响很大。但传统被动悬架的参数固定,而主动悬架系统可在变载荷、变车速、不可预测路况下达到最优,减少振动,保证车辆的乘坐舒适性[1]。
控制系统是主动悬架的核心,它的性能基本上决定了悬架系统的性能,因此国内外学者们对此进行了大量的研究和探索,众多控制方法和策略也都应用到了车辆主动悬架这一领域。最有控制中的线性二次型LQG控制算法与一般的最优控制相比的明显特点是:它研究系统的性能指标是综合性的。因此,LQG控制更具有综合性,灵活性和实用性。在车辆主动悬架设计中,可以由不同的性能需要来提出不同的目标函数,确定相应的加权矩阵,也就是说LQG方法可以通过综合考虑车辆悬架系统中的各种因素来达到对车辆性能的改善。
1 LQG控制策略分析
1.1 控制原理
汽车主动悬架的实际动态系统具有一定的不确定性,主要来自路面激励即随机扰动输入,传感器的量测噪声以及悬架模型参数的不确定性。因此,在悬架控制中,随机线性最优(LQG)控制方法被广泛采用。首先建立悬架系统的状态方程,进而提出最优性能指标和其中的加权系数,求解最优性能指标下的最优控制律。其中,权系数的调整是控制的关键。所选权值系数决定了悬架系统所具有的性能[2]。图1为LQG控制系统原理图。

图1 LQG控制系统原理图
1.2 悬架系统的建立
为了反映主动悬架系统改善座椅处乘坐舒适性的效果,选取座椅加速度为评价指标。因此,在已建立的1/4 2自由度主动悬架模型的基础上,加入座椅系统构成3自由度系统。
在Matlab/Simulink环境中,建立主动悬架仿真系统模型[3],如图2所示。
2 悬架系统的仿真
以座椅加速度为目标对象,在C级路面、v=30 m/s车速下,对被动悬架、主动悬架A和主动悬架B进行仿真分析,从而确定LQG控制对系统的影响。三自由度悬架系统的仿真参数如表1所列。

图2 3自由度主动悬架仿真模型

表1 3自由度悬架系统参数
该LQG控制器性能指标J中,各加权系数分别为轮胎加速度加权系数a1;座椅加速度加权系数a2;座椅相对位移加权系数a3;悬架动行程加权系数a4;轮胎相对位移加权系数a5。
图3是被动悬架的座椅加速度。图4是各加权系数取为a1=1,a2=0.857 3,a3=1 000,a4=10 000,a5=80 000时(称为主动悬架A)图5是在上述主动悬架的基础上(称为主动悬架B),对其中的座椅加速度加权系数取值为a2=1,其余加权系数保持不变的情况下得到的座椅加速度。
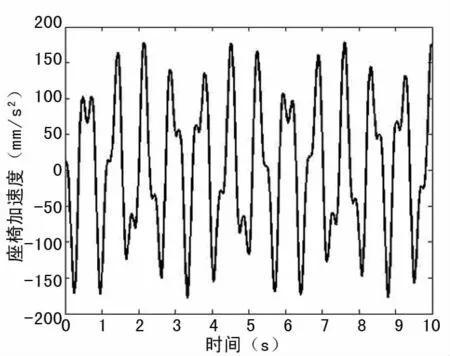
图3 被动悬架座椅加速度
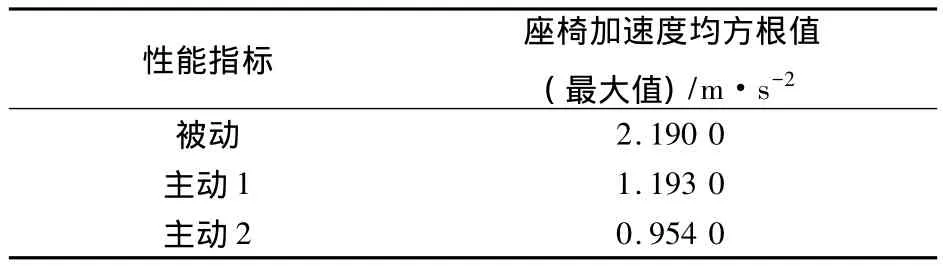
表2 仿真结果比较
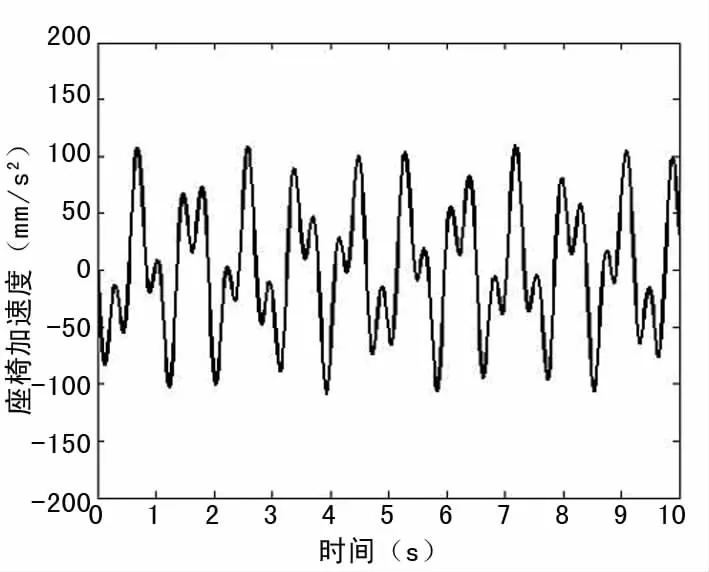
图4 主动悬架A座椅加速度

图5 主动悬架B座椅加速度
3 仿真结果分析
从上述仿真图表可以看出,当主动悬架A车辆在C级路面以14 m/s的速度行驶时,座椅加速度的幅值基本控制在±1.2 m/s2范围内,相比于被动悬架的±2.0 m/s2,可见主动悬架在降低座椅加速度、提高乘坐舒适性和行驶平顺性有明显的效果。
图5的主动悬架B是在主动悬架A的基础上增大座椅加速度的权系数仿真得到的座椅加速度曲线。其加速度值控制在±1.0 m/s2范围内。可见,控制过程中选择合适的加权系数对主动悬架的性能提升也有很好的效果。
以上结果说明采取的LQG控制是行之有效的,并且在控制过程选取合适的权系数对悬架的控制效果也有很大的影响。
4 结语
对3自由度悬架系统LQG控制器的仿真研究,表明具有控制器的主动悬架可以有效地降低座椅加速度,而且选择合适的权系数能更好地降低座椅加速度,改善车辆的乘坐舒适性和操纵稳定性。
[1] 喻 凡,林 逸.汽车系统动力学[M].北京:机械工业出版社,2012.
[2] 张 森,张正亮.MATLAB仿真技术与实例应用教程[M].北京:机械工业出版社,2004.
[3] 董 波.主动悬架最优控制整车模型的研究[J].汽车工程,2002,24(5):422-425.
