基于UG的后视镜驱动器运动仿真*
2014-03-27余远文邓益民
余远文,邓益民
(1.宁波大学机械工程与力学学院,浙江宁波 315211;2.浙江省零件轧制成形技术研究重点实验室,浙江宁波 315211)
0 引言
随着经济的持续发展,人们的物质水平的不断提高,汽车的人均保有量越来越大,随之带来的汽车安全问题也越来越突出。汽车安全可分为主动安全、被动安全和事故发生后的安全性[1]。其中主动安全是减少交通事故的直接保障,而汽车视野安全是主动安全中最重要的一部分,包括直接视野和间接视野。直接视野是指驾驶员透过挡风玻璃、车门玻璃和后窗玻璃,所能看到范围;间接视野是指驾驶员通过内外后视镜观测到的车辆后方区域。直接视野一般没有什么变化,相反间接视野会受到很多因素的影响,如汽车行驶状态的不同、驾驶员的身高差异、座位位置调整不一样等,因此获得一个可靠、舒适的间接视野对于行车安全十分必要。汽车后视镜驱动器是驾驶员调整自己间接视野的重要部件,它通过控制后视镜镜面来改变间接视野。目前市场上的后视镜驱动器可分为手动和电动,笔者将以某公司生产的一款电动后视镜驱动器为例通过UG进行建模和运动仿真[2-3]。
1 UG运动仿真模块介绍
UG(Unigraphics NX)是Siemens PLM Software公司出品的CAD/CAE/CAM产品研发解决方案[4],广泛应用于机械、汽车、航天等工业领域。UG中的运动仿真模块属于CAE方向的一部分,通过模拟机构的运动过程,可以追踪构件的运动轨迹,同时得到构件的速度、加速度和力等参数。运动分析模块的分析结果可以用来指导修改零件的结构设计或调整零件的材料,它主要有四个基本步骤。
(1)设置连杆。连杆是机构中的刚体,机构中的每个运动零件均应定义连杆。
(2)设置运动副。一个独立的空间连杆具有6个自由度,连杆与连杆之间需要通过运动副来相互约束和传递能量。
(3)建立运动算法。一个运动仿真是否可靠,除了运动副要与实际情况一致外,还需要确保驱动力的方式、大小、时间等因素跟真实环境相符,还要根据需要设置重力的方向,阻力等参数。
(4)求解和结果显示。求解是UG内部程序运行的过程,用动画来追踪机构的运动轨迹,用图表和电子表格来表达机构的速度、加速度和力等参数的变化规律。
2 驱动器结构分析
在后视镜系统中,要求镜面可以上下和左右转动,换句话说,电动后视镜驱动器有两个自由度,需要两个动力源,如图1所示是某公司生产的一款电动驱动器。
该驱动器的主要运动过程如图2所示。
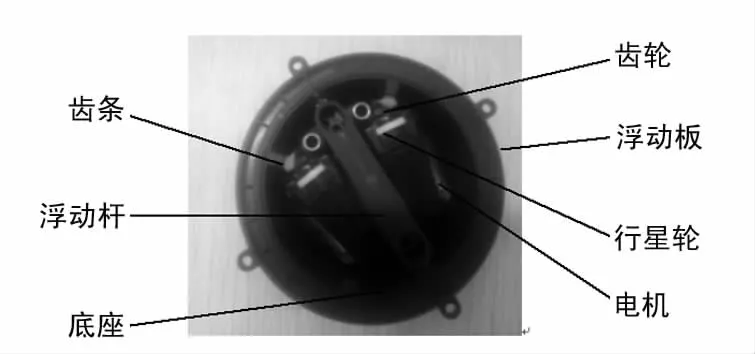
图1 电动驱动器

图2 驱动器的运动过程
这里需要说明的是,驱动器工作过程中总是一个电机运动另一个电机停止,另外浮动板上还有很多约束:浮动板与底座球面副连接;浮动板与浮动杆两端旋转副连接,而浮动杆与底座旋转副连接;浮动板与齿条球面副连接。
3 驱动器UG建模和运动仿真
为了减少建模的复杂性和后续运动仿真的方便,对上述的驱动器进行简化,除去电机和行星轮,在后续的运动仿真中,直接把驱动加到齿轮上,同时把对运动无影响的特征除去。通过UG建模,最终得到如图3所示的驱动器三维图。
因为该模型是在UG建模模块中直接构建,所以不必进行零件的装配,直接进入运动仿真模块。
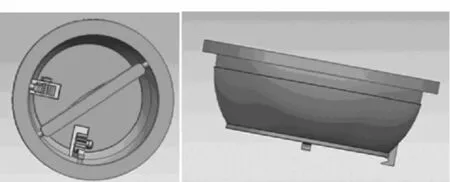
图3 驱动器三维图
(1)设置连杆。按表1所示,设置对应的连杆。
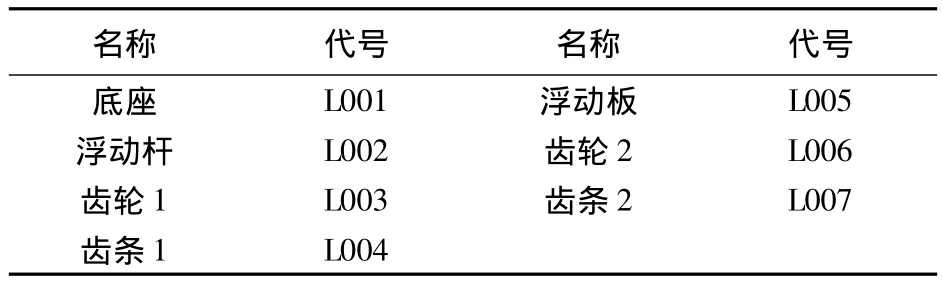
表1 连杆设置对照表
(2)设置运动副。按表2所示,设置各连杆之间的运动副。
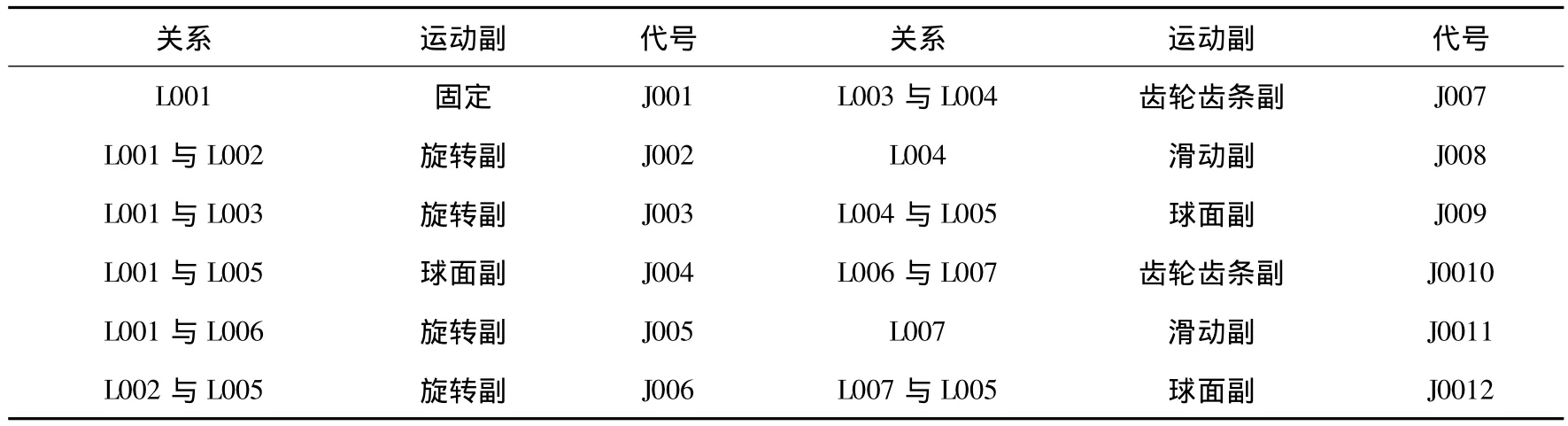
表2 运动副设置对照表
(3)构建运动算法 将L001与L002的旋转副J002的驱动类型设置为恒定,大小为10(°)/s,同时将L001与L006的旋转副J005的驱动类型设置为恒定,大小为0。在解算方案中设定类型为常规驱动,分析类型为运动学/动力学,时间为3 s,步数为100步,重力加速度为9 810.00 mm/s2。
(4)求解和结果显示 通过以上设置后,执行求解命令,随后通过动画来观察驱动器模型的运动过程,图4所示是驱动器模型运动过程中某个时间点下所处的状态。
通过图表和电子表格显示驱动器某部分的位移、速度、加速度和力随时间的变化规律,图5~8是驱动器的J002(旋转副)4个参数的变化图。
图4 某个时间点下的驱动器所处的状态
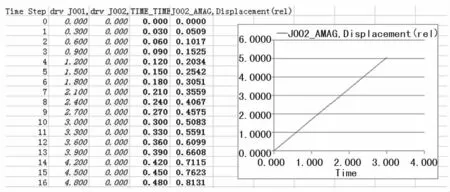
图5 J002的相对角位移
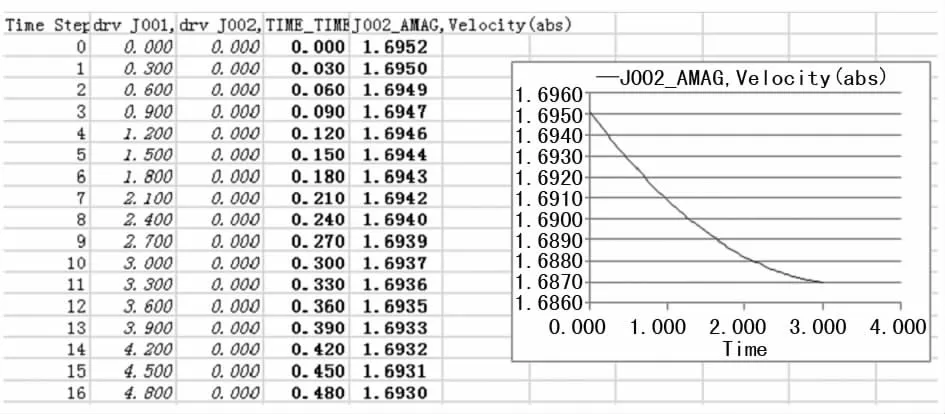
图6 J002的角速度
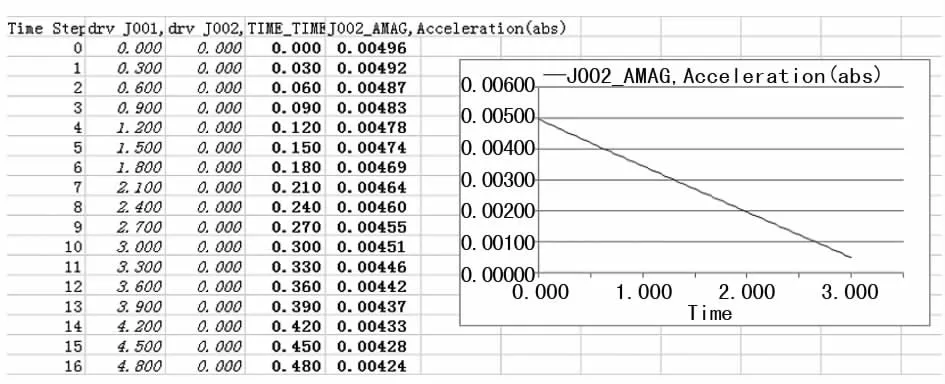
图7 J002的角加速度
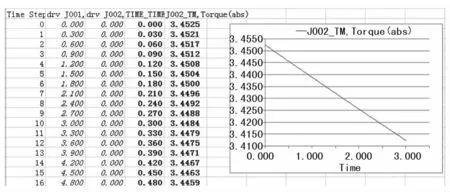
图8 J002的力矩
4 结语
通过对驱动器进行运动分析,能够检查工程师设计的产品结构在实际使用中是否存在干涉,可以判断结构的薄弱之处,用来指导修改零件的结构设计或调整零件的材料等。所构建的三维模型是具体设计模型的简化,还有很多参数未予确定,在具体工程设计中,还需要完善驱动器的三维模型,同时获得并设置与实际相符的相关参数。
[1] 赵 云,唐如亚,陈华杰.后视镜布置与视野安全性分析[J].机电技术,2012(1):90-93.
[2] 宋晓华,汪建平.基于UG的平面连杆机构运动仿真和分析[J].农机化研究,2005(1):107-109.
[3] 冯胜强,胡绳荪,申俊琦.基于UG的弧焊机器人模型装配与运动仿真[J].天津大学学报,2009,6(42):518-522.
[4] 张晋西,张甲瑞,郭学琴.UG NX/Motion机构运动仿真基础及实例[M].北京:清华大学出版社,2009.
