圆盘透明度在水下激光成像系统性能评估中的应用
2014-03-27黎高平杨鸿儒
申 越,郑 威,俞 兵,吴 磊,黎高平,杨鸿儒
(1.中国兵器科学研究院,北京 100089;2.西安应用光学研究所,陕西 西安,710065)
引言
激光主动成像技术具有搜索效率高、分辨率高、定位精确、抗干扰能力强等特点,在水下目标成像探测与识别、海底地形地貌测绘等领域具有广阔的应用前景[1-3]。水下激光主动成像系统的探测能力(最大探测深度)不仅与探测系统自身参数有关,还与水质等环境因素有关。圆盘透明度(圆盘深度)作为水质评价的重要参数,可用来评估水下激光雷达系统的最大探测深度。文献[4]根据辐射传递方程和对比度传输方程,研究了机载激光雷达最大探测深度与海水圆盘透明度的关系,但该文给出的圆盘透明度模型未考虑水体传递函数等参数对激光雷达探测能力的影响,因此只适合评估基于光电倍增管(PMT)等点探测非直接成像技术的水下激光探测系统的探测能力。为评估基于ICCD距离选通及条纹管等直接成像技术的水下激光探测系统的探测能力,根据圆盘透明度成像模型,研究了吸收系数、散射系数、漫射衰减系数等水体水质参数与圆盘透明度的关系,给出了圆盘透明度与水下激光主动成像系统最大探测深度的表达式。实验表明,基于成像理论的圆盘透明度模型反映了水下激光成像系统探测能力与水体水质参数的关系,可用圆盘透明度指标来评估水下激光成像系统的探测能力。
1 圆盘透明度模型
1.1 基于对比度理论的圆盘透明度模型
水质透明度通常用圆盘深度(Secchi depth)来度量,圆盘深度(圆盘透明度)既与水体的固有光学性质有关,也与水体的表观光学性质有关。根据辐射传递理论,水下目标及背景辐亮度的辐射传递方程分别为[4-7]:
L*(θ,φ,z)
(1)
L*(θ,φ,z)
(2)
式中:z为水深;LT和LB分别为水深z处的目标辐射亮度和背景辐射亮度;θ和φ分别为方位角和极角;c为海水衰减系数;L*为路径函数。路径函数可表示为
(3)
式中:β(θ,φ,θ′,φ′,z)为水体体散射函数;(θ,φ)为光束传播方向;(θ′,φ′)为散射光方向。(θ′,φ′)方向引入的散射增益见图1所示。

图1 水体辐射传递过程示意图Fig.1 Schematic diagram of radiation transfer in water
(1)式和(2)式相减得:
-c(z)[LT(θ,φ,z)-LB(θ,φ,z)]
(4)
令r=z/cosθ,将上式积分可得:
(5)
式中:r为观察点距水下目标的距离(即观察距离);z0为目标的初始深度(通常取z0=0);LT0和LB0分别为水深z0处目标的辐射亮度和背景辐射亮度;LTr和LBr分别为距离 处目标的辐射亮度和背景辐射亮度。
根据对比度的定义,水下目标的辐射亮度对比度可表示为
(6)
式中:LT和LB分别为水深z处目标的辐射亮度和背景辐射亮度;CVz为水深z处目标的表观对比度。
将辐射亮度对比度代入(5)式可得:
(7)
而背景辐射亮度呈指数衰减,即:
LBr(θ,φ,z)=LB0(θ,φ,z0)exp(-Kdz)=
LB0(θ,φ,z0)exp(-Kdrcosθ)
(8)
式中Kd为背景辐射亮度漫射衰减系数(即向下辐射漫射衰减系数)。
(8)式代入(7)式可得对比度传输方程:
(9)
对比度传输方程表明水下目标(即圆盘)的表观对比度随观察距离的增加而呈指数衰减。在均匀的水中,可近似认为向下辐射亮度为均匀分布,则圆盘固有对比度为
(10)
式中:ρ为圆盘的反射率;Ed为水中太阳辐射向下辐照度;Eu为水中太阳辐射向上辐照度;ζ为海水太阳辐照度比。
圆盘深度是圆盘垂直下沉(θ=π)到水中恰好看不到的深度,此时,圆盘的表观对比度CVr已下降到人眼灵敏度阈值Cth。根据(9)式和(10)式可得圆盘深度zSD为
(11)
式中:c为衰减系数;Kd为水中太阳向下辐射漫射衰减系数;Γ=ln[ρ-ζ/(ζCth)],ρ为圆盘的反射率,ζ为水下太阳辐射辐照度比,Cth为人眼灵敏度阈值。
1.2 基于成像理论的圆盘透明度模型
根据上述分析,圆盘透明度与水体衰减系数、辐照度比和向下辐射漫射衰减系数等固有光学性质参数和表观光学性质参数有关,但水体散射对圆盘透明度的具体影响并不明确。从成像光学的角度来看,人眼是一个成像光学系统,圆盘为一个二维空间目标,如图2所示。圆盘像的模糊(或消失)由水介质和人眼的成像特性决定的。人眼睛观察到的圆盘像在频域可表示为[8]

图2 人眼圆盘成像模型Fig.2 Secchi depth imaging model of human eyes
G(u,v) =H(u,v)F(u,v)=
Hwater(u,v)Heye(u,v)F(u,v)
(12)
式中G(u,v)、H(u,v)和F(u,v)分别为人眼睛圆盘像g(x,y)、人眼成像系统点扩散函数h(x,y)和圆盘原始图像f(x,y)的傅里叶变换。H(u,v)即系统响应函数,为水体介质响应函数Hwater(u,v)与人眼响应函数Heye(u,v)的乘积。
根据传递函数理论,系统响应函数与传递函数的关系为

(13)
式中:fs为空间频率;z为水深;M(f,z)为系统传递函数;M0为目标(圆盘)固有调制度。
水深z处的传递函数M(fs,z)为
式中Imax(fs,z)和Imin(fs,z)分别为图像细节(或响应信号)的亮度(或照度)最大值和最小值。
水体传递函数为[8-9]
Mmater(fs,z)=exp[D(fs)z]
(15)
式中D(fs)为频率衰减函数(decay transfer function),即:
(16)
其中:c为海水衰减系数;β(θ)为水体体散射函数;θ为散射角;θmax为最大散射角;J0为零阶第一类贝塞尔函数。
水体散射主要分布在很小的前向散射角度范围内,根据小角散射近似理论,水体体散射函数可取下述经验模型[8-9]:
(17)

(17)式代入(16)式可得:
(18)
式中:D(fs→0)=c-b=a;D(fs→∞)=c。
由(15)式和(18)式可得水体传递函数为

(19)
(19)式为单程散射水体传递函数,双程水体传递函数可近似为
(20)
式中Kd为水体漫射衰减系数。
人眼传递函数为[10]
Meye(ρ)=Moptics(ρ)Mretina(ρ)Mtremor(ρ)
(21)
式中:Moptics、Mretina和Mtremor分别为人眼玻璃体、视网膜和虹膜的传递函数;ρ=Rfs为角频率(单位:cycles/mrad),fs为空间频率(单位:lp/mm),R为人眼到圆盘的有效观察距离。
人眼玻璃体的传递函数为
(22)
式中η为人眼像的放大率。io和fo分别由下式给出:
(23)
其中Dpupil为人眼瞳孔直径(单位mm)。双眼观察时的瞳孔直径Dpupil(ρ)=-9.0119+13.23exp{-lg(L/6.154)}-0.5。L为水面亮度(单位:cd/m2)。
视网膜和虹膜的传递函数分别由下式计算:
Mretina(ρ)=exp{-0.375(ρ/η)1.21}
(25)
Mtremor(ρ)=exp{0.444 4(ρ/η)2}
(26)
由(13)式~(26)式可得:
(27)
式中Mth(fs)为人眼传函阈值,fs为圆盘空间频率,M0为圆盘固有调制度。
若圆盘透明度为zSD,由上式可得:
(28)

通常情况下,水体平均散射角θ0≈0.03rad,圆盘直径DSD=0.2或0.3 m,exp(-2πθ0fzSD)·1,令ΓSD=ζ+DSDb/(4πθ0),并考虑到θ=π,上式简化为
(c+Kd)zSD=ΓSD
(29)
与(11)式比较,(29)式考虑了水体传递函数、人眼传递函数等因素对圆盘透明度的影响,圆盘透明度zSD不仅与水体衰减系数和漫射衰减系数等参数有关,还取决于平均散射角等参数。
2 圆盘透明度在水下激光成像系统性能评估中的应用
2.1 圆盘透明度与水体光学性质参数关系
圆盘透明度表征的是整个可见光范围内(380~760)nm的海水光学性质,但由于水中激光在蓝绿波段衰减系数最小,同时人眼对550 nm波长附近的绿光响应度最高,可用圆盘透明度来近似估算蓝绿波段的海水光学性质参数。
在蓝绿波段,水中激光的单程散射反照率为[11]
ω=b/c≈0.944-0.048/c
(30)
水体漫射衰减系数与吸收系数和散射系数的经验公式为[11]
Kd=Aa+Bb
(31)
式中:A=1.21;B=0.19。
由(30)式和(31)式可得漫射衰减系数与衰减系数的关系为
Kd=0.247c+0.049
(32)
根据(29)式,可得圆盘透明度与水体光学参数的关系为
c≈0.802ΓSD/zSD-0.039
(33)
Kd≈0.198ΓSD/zSD+0.039
(34)
对直径DSD=0.2 m黑白相间圆盘,在晴朗白天,Meye≈1,Mth≈0.01,M0≈0.9,则ζ≈4.5。若水体平均散射角θ0≈0.03 rad,ΓSD≈4.5+0.5b。圆盘透明度与水体光学参数理论计算值见表1所示。

表1 圆盘透明度与水体光学参数系数理论计算值Table 1 Secchi depth and theoretical optical parameters of water
2.2 圆盘透明度与水下激光成像系统性能评估
以ICCD距离选通水下激光成像系统为例,水下目标的对比度为[12]
(35)
式中:C0为水下目标固有对比度;MTF=MTFwater·MTFICCD为成像系统传递函数,MTFwater为水体传递函数,MTFICCD为ICCD水下成像系统传递函数;fs为空间频率。
水下目标固有对比度可近似为
(36)
式中:Ntarget和Nbackscatter分别为水下目标和水体后向散射的接收光子数;ρtarget为水下目标反射率;c0为空气中光速;nwater为水体折射率;tpulse为激光脉冲宽度;β(π)为水体后向散射系数。
ICCD水下成像系统的传递函数主要由像增强器传递函数决定,可近似为高斯函数[12-13]:
(37)
式中fICCD为ICCD水下成像系统传递函数参数。
对极限探测情况,则有:
(38)
式中:z为探测深度;Cth为ICCD成像系统最小目标分辨对比度;flens为水下成像系统接收光学焦距。
若水下目标的临界尺寸为Dtarget,由式(38)可得最大探测深度:
(39)

某次ICCD水下距离选通成像实验获得的最大探测深度图像见图3所示。最大探测深度值与圆盘透明度关系见表2所示。

图3 距离选通成像系统极限探测距离实验图Fig.3 Range gated images of underwater targets at maximum detecting ranges
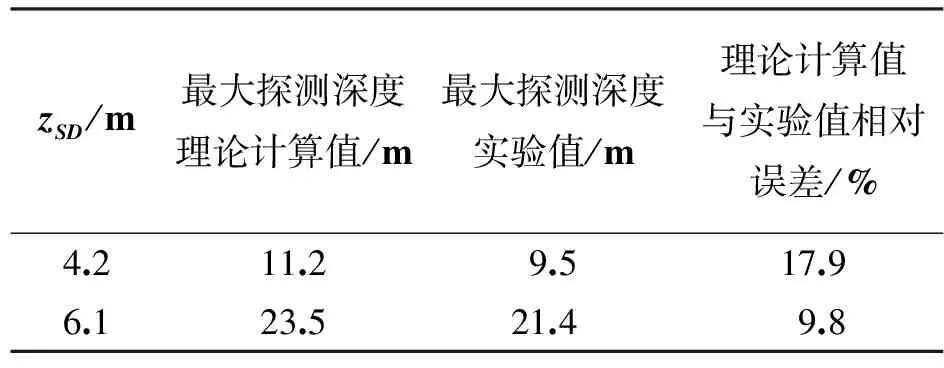
表2 最大探测深度与圆盘透明度关系Table 2 Relation between max detection range and Secchi depth
实验中,ICCD距离选通水下成像系统激光脉宽为tpulse=10ns,焦距为flens=100mm,传递函数参数为fICCD=200cyc/mrad,水体后向散射系数为β(π)=0.0025Wm-1·sr-1,水体折射率为nwater=4/3,水下目标直径为Dtarget=0.5m,反射率为ρtarget=0.2。ICCD距离选通水下成像系统最大探测深度理论值通过圆盘透明度得到水体光学参数系数c、b和Kd,再根据(39)式计算得到。可见,最大探测深度实验值与理论计算值基本吻合,相对误差小于20%。
3 结束语
水下激光主动成像系统的探测能力不仅与探测系统自身参数有关,还与水质等环境因素有关。为评估水质对水下激光成像系统探测能力的影响,根据圆盘透明度成像理论,研究了吸收系数、散射系数、漫射衰减系数等水体水质参数与圆盘透明度的关系,给出了水下激光主动成像系统最大探测深度与圆盘透明度的表达式。实验表明,ICCD距离选通水下成像系统最大探测深度值与理论计算值相对误差小于20%。基于成像理论的圆盘透明度模型反映了水下激光成像系统探测能力与水体水质参数的关系,可用圆盘透明深度来评估水下激光成像系统的探测能力。
[1]WULei,SHENYue,LIGaoping,etal.Modelingandsimulationofrange-gatedunderwaterlaserimagingsystems[J].SPIE,2009,7382:73825B.
[2] 陈超,杨鸿儒,吴磊,等. 基于距离选通成像系统的水下目标探测技术研究[J]. 应用光学,2011,32(4):753-757.
CHENChao,YANGHong-ru,WuLei,etal.Researchofunderwaterobjectsdetectionusingrange-gatedimagingsystem[J].JournalofAppliedOptics,32(4):753-757.(inChinesewithanEnglishabstract)
[3] 陈超,杨鸿儒,吴磊,等. 水下目标光电探测技术及其进展[J]. 应用光学,2011,32(6):1059-1066.
CHENChao,YANGHong-ru,WuLei,etal.Underwatertargetdetectionwithelectro-opticalsystem[J].JournalofAppliedOptics,32(6):1059-1066.(inChinesewithanEnglishabstract)
[4] 姜璐,朱海,李松.机载激光雷达最大探测深度同海水透明度的关系[J].激光与红外,2005,35(6):397-399.
JIANGLu,ZHUHai,LISong.TherelationshipbetweenmaxsurveydepthofairborneoceanlidarandSecchidepth[J].Laser&Infrared,2005,35(6):397-399.(inChinesewithanEnglishabstract)
[5]PREISENDORFERRW.Eyeballopticsofnaturalwaters:Secchidiskscience[R].U.S.NationalOceanicandAtmosphericAdministration,EnvironmentalResearchLaboratoriesRep., 1986.
[6]PREISENDORFERRW.Secchidiskscience:Visualopticsofnaturalwaters[J].Limnol.Oceanogr, 1986,31: 909-926.
[7]ZANEVELDJRandPEGAUWS.Robustunderwatervisibilityparameter[J].Opt.Express, 2004,11(23): 2997-3009.
[8]HOUWL,LEEZP,WEIDEMANNAD.WhydoestheSecchidiskdisappear?Animagingperspective[J].Opt.Express, 2007,15(6): 2791-2802.
[9]WELLSWH.Theoryofsmallanglescattering[R].US:AGARDLec., 1973.
[10]LEACHTENAUERJC,DRIGGERSRG.SurveillanceandReconnaissanceImagingSystems[M].US:ArtechHouse,Inc., 2001.
[11]SMARTJH.Empiricalalgorithmsforoceanopticsparameters[J].Opt.Express, 2007,15(12): 7152-7164.
[12] 韩宏伟,张晓晖,葛卫龙.水下激光距离选通成像系统的模型与极限探测性能研究[J].中国激光,2011,38(1):0109001.
HANHong-wei,ZHANGXiao-hui,GEWei-long.Studyofthemodelandmaximumdetectingperformanceofunderwaterlaserrange-gatedimagingsystem[J].ChineseJ.Laser,2005,2011,38(1):0109001.(inChinesewithanEnglishabstract)
[13]JOHNSONCB,OWENLD.HandbookofOptics[M]. 3rded.US:McGraw-HillCompanies,2010.