LED路灯智能控制系统的设计与仿真
2014-03-25顾光旭
顾光旭
(盐城工学院 电气工程学院,江苏 盐城 224051)
随着经济的高速发展和汽车的普及,城市道路照明显得尤为重要。由于不可再生资源的日益枯竭,环保、高效、绿色的LED(发光二极管)路灯越来越受到人们的重视[1]。本文设计了一种LED路灯智能照明系统。系统采用AT89C51单片机为主控制器,可根据环境明暗变化自动控制路灯的开启和关闭,也可以通过键盘手动控制。系统还具有调光功能,按照设定使路灯驱动电流在一定范围内可调节,具有很高的实用价值。
1 系统总体设计方案
系统总原理框图如图1所示。系统的硬件电路主要由系统控制电路、恒流源驱动电路、红外检测电路、键盘与显示电路、背景光检测电路等电路组成。
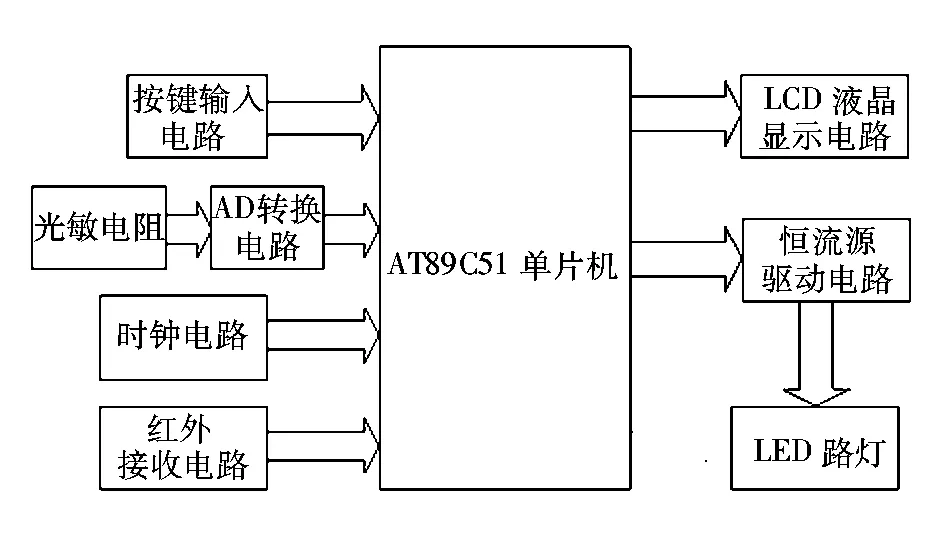
图1 系统原理框图Fig.1 The principle block diagram of the system
光敏电阻的阻值随着光照强度发生变化,其两端的电压也发生相应变化,光敏电阻两端的电压模拟信号经过AD转换电路转换成的数字信号传送给单片机。红外发射器安装在路灯杆上,红外接收器安装在路灯支架上,当红外接收器检测到红外信号时,如果此时外部环境较暗,则单片机输出PWM波控制恒流源驱动电路,驱动LED路灯工作。系统根据环境光强值分11个PWM(相当于PWM波的占空比从0%到100%平均分为11个等级)等级调节路灯的亮度。背景光越暗,PWM等级越高,LED路灯的亮度就越大。通过背景光检测电路和红外检测电路的共同作用,智能控制LED路灯。通过按键输入可以控制系统自动或者手动运行,手动运行时可以直接控制LED路灯的开关和亮度。LCD液晶显示可以显示实时时间、工作状态和PWM级数。 A、 M分别代表自动状态和手动控制工作方式。
2 系统的软件设计
系统的主程序流程如图2所示[2]。首先初始化,接着通过键盘扫描,判断自动还是手动控制状态,手动状态下判断PWM级数是增加还是减少。屏幕会更新当前工作状态,然后从时钟芯片获取时间,接着检测背景光强度,通过AD芯片转换数据,此时判断否是自动状态,如果是自动状态,系统判断出探测区域内有人或车辆,则计算输出PWM级数同时显示时间;如果探测区域内没有人或车辆,则PWM输出为零。如果是手动状态,则直接显示PWM的级数和时间。

图2 主程序流程图Fig.2 The flow diagram of the main program
3 LED路灯智能控制系统仿真
Keil C51软件是51系列兼容单片机C语言软件开发系统,Protues软件是电子设计自动化工具软件。采用Proteus7.5和KEIL软件对系统进行了仿真。
3.1 系统仿真
LED路灯智能控制系统仿真电路如图3所示,采用AT89C51作为控制器。仿真中,用电位器代替光敏电阻,用开关代替电红检测电路,开关闭合表示探测区域内有人或车辆,开关断开则表示探测区域内没有人或车辆。
3.2 系统光控功能的仿真
通过按键S3把电路的工作状态转换到自动状态,LCD显示屏显示A。
当白天光照度很高时,光敏电阻的阻值为零。此时模拟探测区域内有人或车辆,观察单片机P30口输出的PWM波形和恒流源驱动的LED灯工作情况如图4和图5所示,PWM输出0级,路灯熄灭。
当遭遇恶劣天气或者傍晚时,光照度下降,光敏电阻阻值变化,假设此时光敏电阻的阻值是自身的50%。如果模拟探测区域内有人或车辆,观察此时示波器PWM波形和LED路灯工作情况如图6和图7所示,PWM输出5级(相当于PWM波的占空比为50%),LED路灯半亮。
如果模拟探测区域内没有人和车辆经过,观察此时示波器PWM波形和LED路灯工作情况如图8和图9所示, PWM输出0级(相当于PWM波的占空比为0),LED路灯熄灭。
当黑夜时,光敏电阻阻值为100%,观察此时示波器PWM波形和LED路灯工作情况如图10和图11所示,PWM输出10级(相当于PWM波的占空比为1),路灯亮度最强。
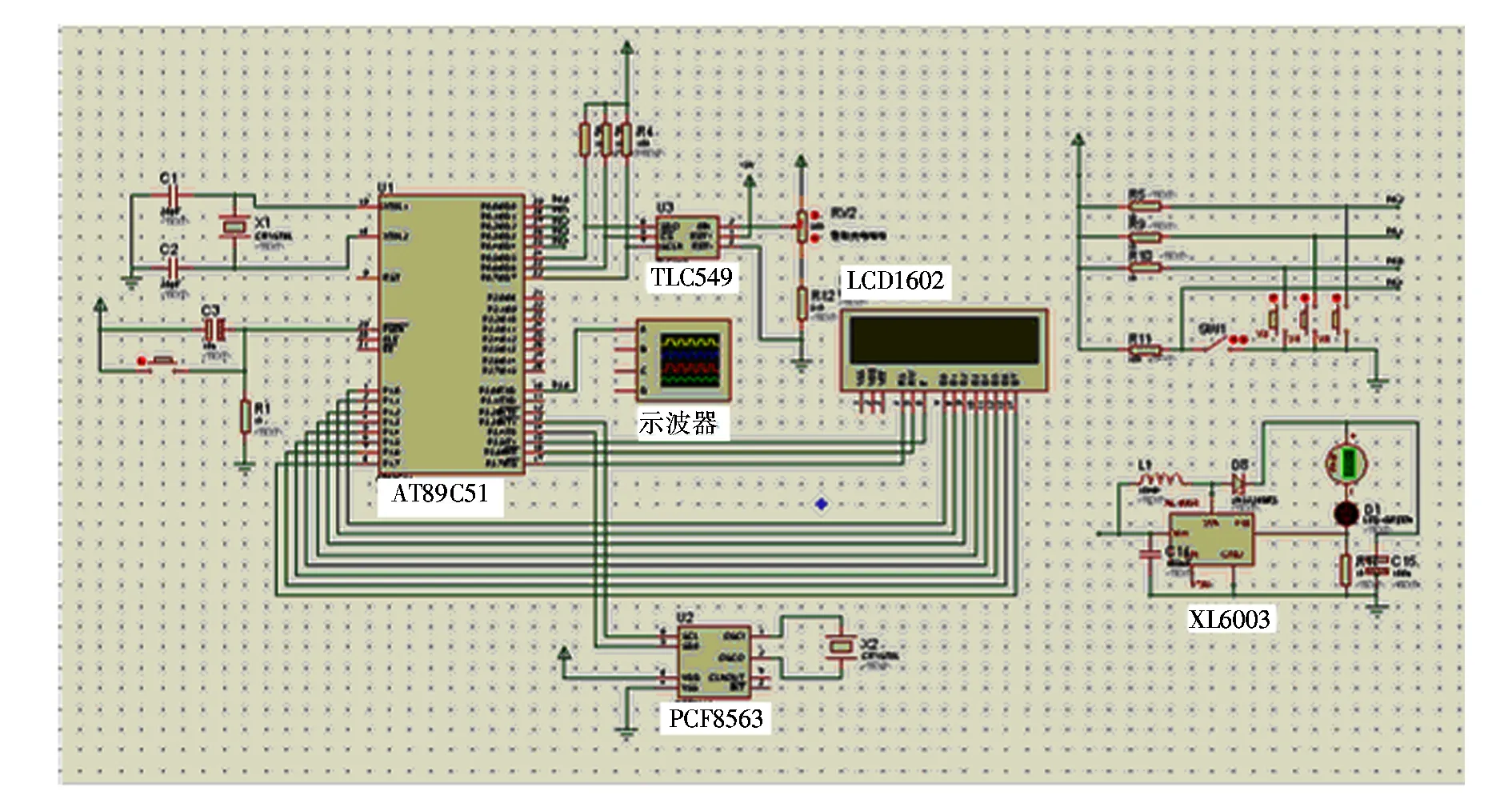
图3 智能控制系统仿真电路图Fig.3 Simulation diagram of the intelligent control system
图4 白天PWM输出Fig.4 PWM output during the day
图5 白天LED路灯状态Fig.5 LED state during the day
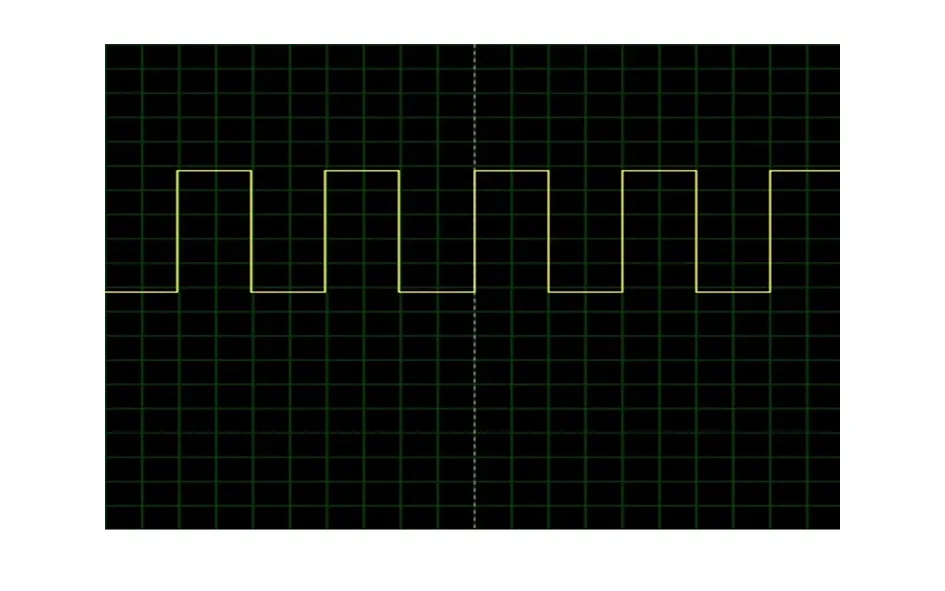
图6 特殊天气PWM输出情况1Fig.6 PWM output 1 in rainy days

图7 特殊天气LED路灯状态1Fig.7 LED state 1 in rainy days

图8 特殊天气PWM输出情况2Fig.8 PWM output 2 in rainy days

图9 特殊天气LED路灯状态2Fig.9 LED state 2 in rainy days
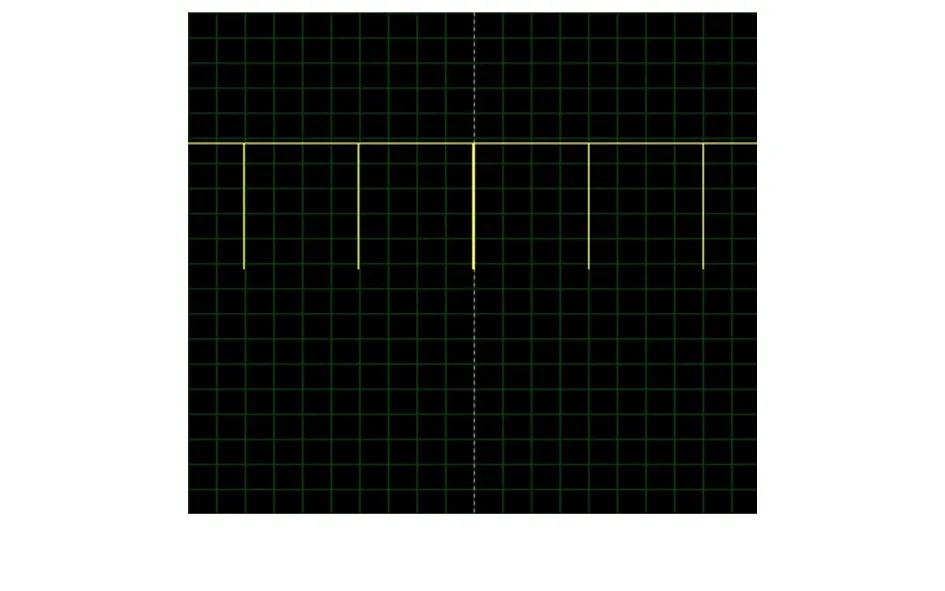
图10 黑夜PWM输出Fig.10 PWM output during the night

图11 黑夜 LED状态Fig.11 ED state during the night
由上述仿真可以看出,当背景光强度较暗时,如果红外探测区域内有人或车辆经过,则单片机输出PWM脉冲,恒流源驱动电路控制LED灯工作,并且根据背景光的亮度控制PWM输出相应的等级,背景光越暗,PWM输出脉宽就越宽,驱动LED灯电流就越高,LED灯就越亮。
3.3 系统手动功能的仿真
按下开关S3转换电路状态为手动控制,LED显示屏显示为M,每按一下按键S5,PWM输出级数增加1(相当于PWM波的占空比增加10%),每按一下按键S4,PWM输出级数减少1。PWM输出级数为1时示波器PWM波形和LED路灯工作情况如图12和图13所示,PWM输出1级(相当于PWM波的占空比为10%),LED路灯是最亮时的十分之一。

图12 手动时PWM输出Fig.12 PWM output in manual operation
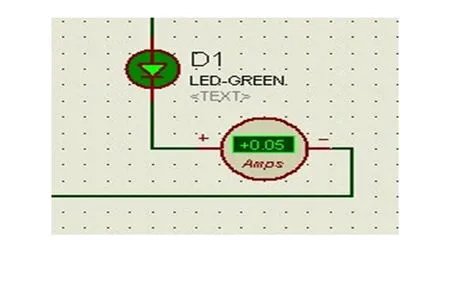
图13 手动时 LED状态Fig.13 LED state in manual operation
由上述仿真可见,LED灯的开关和亮度全部由手动控制,跟背景光和红外探测区域是否有人或车辆没有关系。
4 结论
通过仿真验证了基于AT89C51单片机的LED路灯智能控制系统的所有功能,证明了该系统具有结构简单,可靠性高,操作方便等特点。系统的优点是能够对环境光自动检测,当红外检测范围内检测到行人和车辆时,在外部环境光线不足情况下自动开启路灯,从而大大减少了危险事件的发生,提高了道路的安全性,有效地节约了能源。
参考文献:
[1] 杨恒.LED照明驱动器设计[M].北京:中国电力出版社,2010.
[2] 周海.智能路灯节能控制系统研究[D].武汉:武汉理工大学,2009.
