上凸下凹前后对称翼型低速气动特性研究
2014-03-25王年华赵旭李晓东郭汉青
王年华, 赵旭, 李晓东, 郭汉青
(西北工业大学 航空学院, 陕西 西安 710072)
当前一些无人机使用火箭助飞,零长发射,伞降回收,因环境干扰,其起降具有不定因素,尤其是舰载无人机,容易掉入水中,不仅消耗火箭且不能实现悬停[1],针对这一情况,Rutherford和其他学者提出了兼具垂直起降性能和高速巡航性能的概念飞行器——旋转鸭翼/机翼飞行器(Canard Rotor/Wing, CRW)[2-3],国内学者也提出翼尖喷气驱动旋转机翼的方案[4]。
旋转机翼飞机在起飞时可由旋翼旋转提供拉力,在到达巡航高度后,锁定旋翼充当固定翼的主机翼[5],因此既能保持垂直起降,悬停的优势,又能保证固定翼飞机巡航状态高升阻比性能的要求。旋转机翼的这一特点决定了其只能使用特殊的前后对称翼型。常见的前后对称翼型主要有菱形翼、六边形翼、圆弧翼及椭圆翼,这些翼型中,有些已经应用在旋转机翼上。探索气动特性优良的亚音速前后对称翼型,对旋翼的研究具有重要意义。
针对旋转机翼翼型设计,文献[6]提出相对厚度为16%的椭圆翼型,并做了相关数值计算和试验验证,研究了椭圆翼型的低速气动特性。由于椭圆翼型没有弯度,导致翼型升阻特性不够理想。因此,本文初步设计了若干具有弯度的上凸下凹的前后对称翼型,并用数值计算方法筛选出升阻特性较好的翼型。在西北工业大学低湍流度风洞进行了低速风洞试验,对新设计的翼型在不同工况下的压力分布和气动特性进行了测量,并与数值结果进行了对比和分析。
1 上凸下凹前后对称翼型的初步设计
本文在传统翼型的基础上,将其最大厚度以前部分以左右对称的形式处理,构造出上凸下凹前后对称翼型。考虑旋翼沿展向各截面Ma和Re不同,选取Ma=0.03、0.15、0.4及0.6的4个主要工作截面综合考虑旋转机翼的气动特性。采用翼型分析软件DesignFOIL[7]进行初步筛选,获得了若干翼型,再采用CFD软件Fluent[8]进行准确的性能预测,并分析了翼型气动性能随厚度、弯度、弯度分布、厚度分布以及前缘半径等几何参数的影响。通过对基本翼型几何形状(弯度、厚度等)的不断修正来寻求目标函数(如升阻比)的极限值,以求得在不同工况下气动性能最佳的翼型。筛选部分结果如表1所示。

表1 上凸下凹前后对称翼型的Fluent计算结果
根据结果选定前后对称翼型GOE-10-12,该翼型最大相对厚度10%,最大相对弯度12%,前缘半径0.54%,如图 1所示。

图1 翼型GOE-10-12几何形状
2 风洞试验方法与设备
为了验证数值模拟的准确性,对优选翼型制作模型,进行了低速翼型的升、阻力测量试验。
2.1 试验方法
采用跨风洞左右壁的二元测压实验模型进行试验,在模型翼展中部3个剖面开静压孔,测量翼型表面的压力分布,用以计算翼型的升力,在模型后缘0.8c处安装总压排管,测量模型尾迹区的总压分布和静压,用以计算翼型的阻力。
2.2 试验模型和设备
试验模型为全木质模型,展长0.38 m,弦长0.3 m。在模型中心位置,绕翼型上下表面开有60个测压孔。试验风洞为西北工业大学低湍流度风洞(LTWT),风洞试验段的湍流度在0.02%~0.3%的范围内可调整。本次吹风试验在LTWT风洞的二元试验段中进行,二元试验段长宽高分别为2.8 m ×0.4 m×1.0 m。当试验段的中心流速为8 m/s、15 m/s和30 m/s时,湍流度分别约为0.03%、0.025%和0.02%。
尾耙管采用91根文德利型总压管和4根静压管, 可根据试验的具体情况进行移动;风洞采用DSY104电子扫描微压测量系统共有192个压力测量通道,量程分别为160通道±2.5 kPa、32通道±7.5 kPa,测压精度小于±0.2%FS,扫描速率50 000点/s。
3 试验结果与数值计算结果对比分析
由于风洞条件限制,选定3种风速(V=20 m/s、30m/s、40m/s,对应雷诺数Re分别为4.11×105、6.16×105和8.22×105)进行试验,并用数值模拟重新计算了对应工况下的升力和阻力。
数值模拟模型设置情况:计算网格为400×200的O型结构网格,翼型局部网格如图2所示,边界层网格加密,且第一层网格厚度为弦长的 10-5。湍流模型采用Realizablek-ε模型,该模型是两方程的标准k-ε模型针对强旋流,弯曲壁面流动或弯曲流线流动的改进模型,适合充分发展的湍流模拟[7]。边界条件为无限远场,求解流动采用一阶迎风格式。

图2 翼型O型网格局部放大图
3.1 升力系数、阻力系数试验值与数值计算比较
图3至5分别给出了3种不同风速下的升力系数和阻力系数的计算值与试验值的比较,从图中可以看出,3种工况下,升力系数试验值和计算值在迎角8°之前存在一定误差,在8°以后两者吻合较好。试验测得的升力系数曲线在迎角较小时呈线性增加,6°达到最大值1.4~1.6(40 m/s时是4°),接着升力系数略微减小(减小了0.1~0.2),出现平缓失速,10°后升力系数又随迎角增加逐渐增大,恢复到最大值,且试验获得的升力系数绝大多数均大于计算值,这显示出该翼型良好的升力特性和失速特性。此外注意到试验值在迎角等于0°时,翼型在3种风速下的升力系数均大于1.0,体现出上凸下凹前后对称翼型不同于常规翼型的升力特性。
阻力系数的对比表明,3种风速下,试验值分别在迎角为0°~10°,0°~7°和1°~6°时小于计算值,其他迎角下大于计算值。2种方法的误差分析见3.3节。试验获得的3种风速下的最大升阻比分别为59、76、79,对应迎角为4°~6°;数值计算获得的最大升阻比在35~40左右,对应迎角为4°,可见试验获得的升阻比高于数值计算结果。
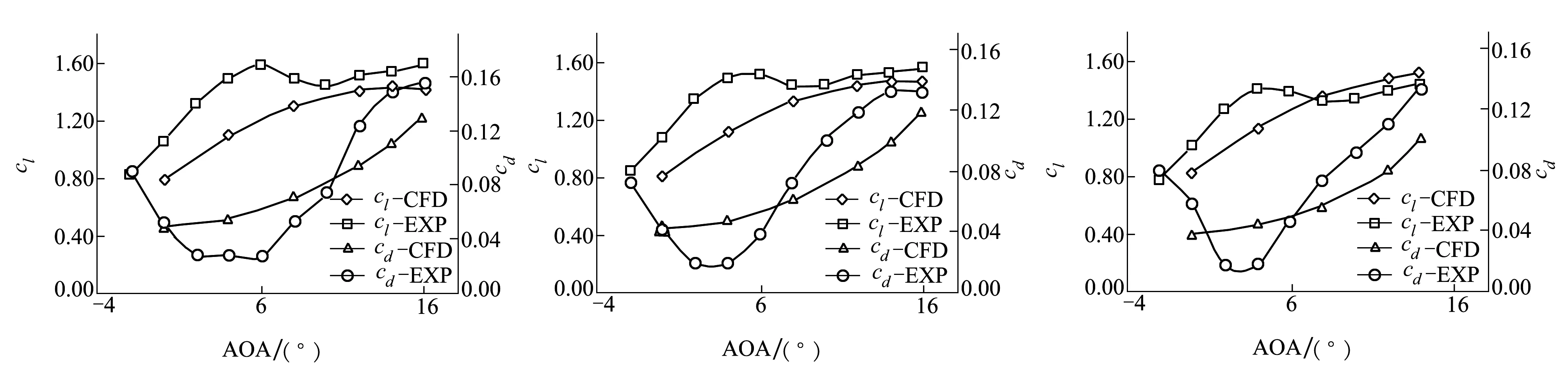
图3 风速20 m/s时升力和阻力系数 图4 风速30 m/s时升力和阻力系数 图5 风速40 m/s时升力和阻力系数
3.2 压力分布的对比
图6至8给出了40 m/s工况下3种迎角下试验和数值计算获得的翼型压力分布的对比,从图中可以看出,在迎角为4°时,二者存在较大误差,随着迎角增大,吻合程度更好,8°迎角及12°迎角均吻合较好,从压力分布的吻合程度上也可以看出小迎角时升力系数计算值和试验值误差较大,而大迎角时误差相对较小。

图6 风速40 m/s,迎角4°时压力分布对比 图7 风速40 m/s,迎角8°时压力分布对比 图8 风速40 m/s,迎角12°时压力分布对比
3.3 误差分析
风洞试验误差[8]来源主要有以下几个方面:①模型采用泡桐木加工,加工精度和木材刚度会导致模型几何形状与设计翼型存在偏差,另外模型测压孔与翼型表面不能保证高精度垂直和翼型表面粗糙度影响也可能导致误差;②由于测量采用较低风速,测量段略微的风速波动都会产生较大的相对误差,而且湍流度对低速试验的影响大;③二元攻角机构调整翼型迎角时也存在一定误差;④压力传感器的精度会带来测量误差。
数值计算误差来源主要有以下几个方面:①网格对计算的精度影响较大,可采用更细的网格应用于更强大的计算平台上,提高计算精度;②无论在何迎角,绕翼型的流动都有漩涡的存在(如图9所示),且漩涡位置随迎角的增大由后缘沿上翼面向前移动,由于漩涡的存在使得上述定常模型计算得到的结果可能出现一定的出入;③用全湍流模型去模拟整个绕翼型的流场也会造成数值计算上的误差,实际流动中存在转捩问题,这在数值模拟中并未考虑。小迎角时误差较大,可以考虑小迎角时采用其他湍流模型,如S-A;④数值计算过程中加入的人工粘性项可能使计算所得升力偏小,阻力偏大,导致升阻比偏小。

图9 风速40 m/s迎角12°数值计算获得的流线图
4 结 论
1) 本文初步设计了上凸下凹前后对称翼型,可为兼顾垂直起降和高性能巡航的旋转机翼飞行器翼型的选择提供参考,但在翼型的设计及优化方法上仍有待深入研究;
2) 本文对于新设计的翼型进行了详细的数值计算及风洞试验,分析了试验结果及试验结果与数值结果产生误差的原因;
3) 在本文的试验条件下,新设计的翼型最大升力系数cl,max在迎角6°~10°之间可达到1.4~1.6,最小阻力系数cd,min在迎角2°~4°之间可达到0.02~0.03,失速迎角在6°左右,失速平缓。最佳设计迎角在4°~6°之间,此时升力系数cl在1.3~1.5之间,升阻比在59~79之间;
4) 本文只研究了翼型在低速情况下的气动特性,对于由该翼型设计的旋转机翼的气动特性有待进一步研究。
参考文献:
[1] 王祥云. 无人机共轴旋转机翼的气动设计初步研究[D]. 西安: 西北工业大学, 2013
Wang Xiangyun. Preliminary Aerodynamic Design and Study of a Coaxial Rotor Wing for an UAV [D]. Xi′an: Northwestern Polytechnical University, 2013 (in Chinese)
[2] Rutherford J W, Bass S M, Larsen S D. Canard Rotor/Wing: A Revolutionary High-Speed Rotorcraft Concept [C]∥1993 AIAA/AHS/ASEE Aerospace Design Conference, Irvine, CA, 1993
[3] Bass S M, Thompson T L, Rutherford J W. Fixed-Wing Performance Predictions of the Canard Rotor/Wing Concept Based on Wind Tunnel Test Results [C]∥13th AIAA Applied Aerodynamics Conference, Washington, D.C., 1995
[4] 邓阳平, 詹浩, 高正红. 翼尖喷气驱动旋转机翼悬停状态地面试验研究 [C]∥飞行力学与飞行试验(2006)学术交流年会论文集, 四川, 成都, 2006
Deng Yangping, Zhan Hao, Gao Zhenghong. Experimental Study on Wing Tip Jet Driven Rotary Wings at Ground Hovering State [C]∥Flight Mechanics and Flight Test Academic Communication Annual Symposium, Chengdu, 2006 (in Chinese)
[5] Mitchell C B. Vogel The Canard Rotor Wing (CRW) Aircraft A New Way to Fly[R]. AIAA-2003-2517
[6] 詹浩, 邓阳平, 高正红. 椭圆翼型低速气动特性研究[J]. 航空计算技术, 2008, 38(3): 25-27
Zhan Hao, Deng Yangping, Gao Zhenghong. Investigation on Aerodynamics Performance of Elliptic Airfoil at Low Speed[J]. Aeronautical Computing Technique, 2008, 38(3): 25-27 (in Chinese)
[7] 张师帅. 计算流体动力学及其应用: CFD软件的原理与应用[M]. 武汉: 华中科技大学出版社 2011: 82-86
Zhang Shishuai. Computational Fluid Dynamics and Its Application: Theory and Application of CFD Software[M]. Wuhan: Huazhong University of Science & Technology Press, 2011: 82-86 (in Chinese)
[8] 恽起麟, 风洞实验数据误差分析[J]. 气动实验与测量控制, 1994, 8(2): 62-70
Yun Qilin. The Error Analysis for Wind Tunnel Testing Data[J]. Aerodynamic Experiment and Measurement & Control, 1994, 8(2): 62-70 (in Chinese)